Kinematics Of A Robot . Kinematics is geometry of motion. Each dof is typically associated with a joint variable. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: A robot's configuration is a minimal expression of its links position, and usually consists of the. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. The pose of a robot arm is described by all joints (all dofs). It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. Forward kinematics (fk) is to derive the relationship between joint.
from robocademy.com
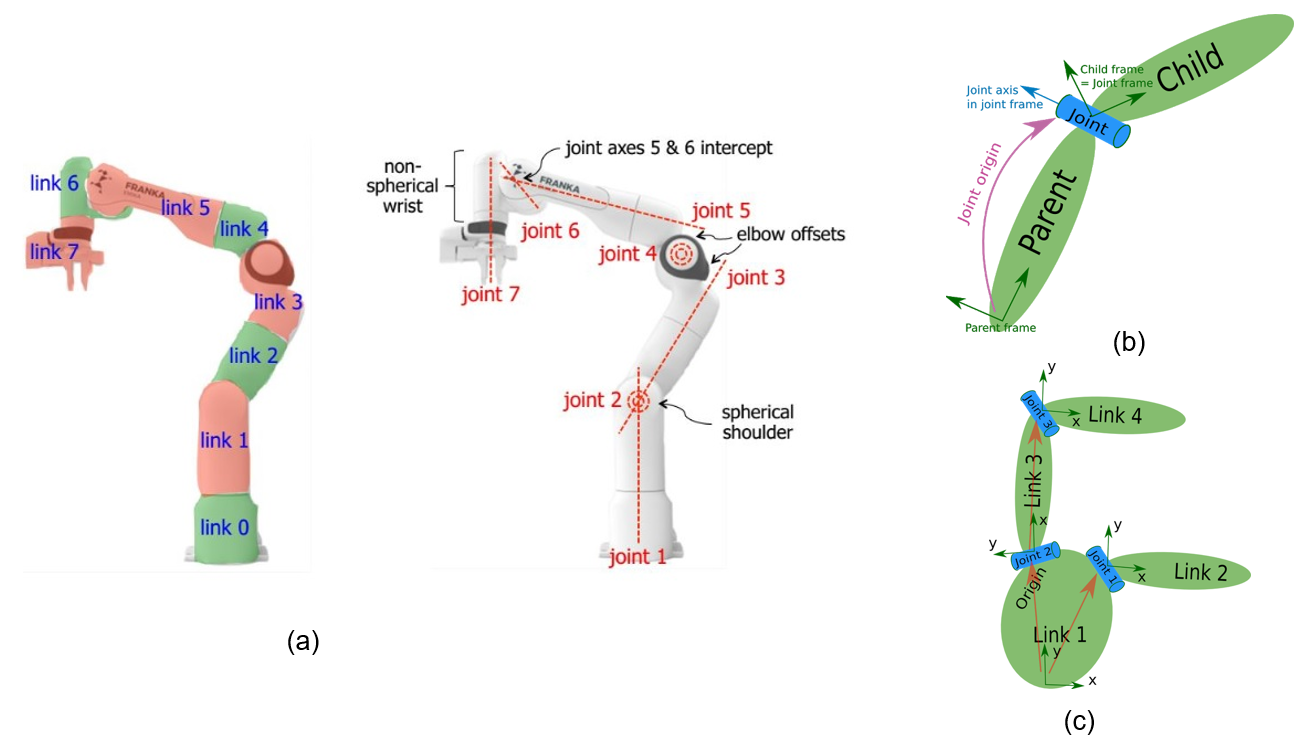
The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. The pose of a robot arm is described by all joints (all dofs). Each dof is typically associated with a joint variable. Forward kinematics (fk) is to derive the relationship between joint. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. A robot's configuration is a minimal expression of its links position, and usually consists of the. Kinematics is geometry of motion. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the.
Robot Kinematics in a Nutshell
Kinematics Of A Robot Each dof is typically associated with a joint variable. Each dof is typically associated with a joint variable. The pose of a robot arm is described by all joints (all dofs). To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Forward kinematics (fk) is to derive the relationship between joint. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. A robot's configuration is a minimal expression of its links position, and usually consists of the. Kinematics is geometry of motion. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and.
From www.myxxgirl.com
Forward Kinematics Analysis Of Dof Robotic Arm By Transtellar My XXX Kinematics Of A Robot In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. A robot's configuration is a minimal expression of its links position, and usually consists of the. Forward kinematics (fk) is to derive the relationship between joint. To start,. Kinematics Of A Robot.
From www.semanticscholar.org
[PDF] Robot Kinematics and Dynamics Semantic Scholar Kinematics Of A Robot A robot's configuration is a minimal expression of its links position, and usually consists of the. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. To start, we will see a light overview of the robot components. Kinematics Of A Robot.
From aleksandarhaber.com
Numerical Solution of Forward Kinematics Problem of Differential Drive Kinematics Of A Robot Each dof is typically associated with a joint variable. Forward kinematics (fk) is to derive the relationship between joint. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. A robot's configuration is a minimal expression of its links position, and usually consists of the. It is one of the most. Kinematics Of A Robot.
From www.researchgate.net
Manipulator robot, with relationship between forward and inverse Kinematics Of A Robot The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. Kinematics is geometry of motion. The pose of a. Kinematics Of A Robot.
From www.myxxgirl.com
Solving Inverse Kinematics Model For Dof Robot Arms Based On Space My Kinematics Of A Robot Kinematics is geometry of motion. The pose of a robot arm is described by all joints (all dofs). In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. A robot's configuration is a minimal expression of its links. Kinematics Of A Robot.
From www.reddit.com
QUESTION Problem when implementing inverse kinematics for a SCARA Kinematics Of A Robot The pose of a robot arm is described by all joints (all dofs). It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Each dof is typically associated with a joint variable. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the. Kinematics Of A Robot.
From www.nickbenoit.me
Three Degree of Freedom Robotic Arm — Nick Benoit Kinematics Of A Robot It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. A robot's configuration is a minimal expression of its links position, and usually consists of the. Each dof is typically associated with a joint variable. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the. Kinematics Of A Robot.
From www.slideserve.com
PPT Robot Kinematics II PowerPoint Presentation, free download ID Kinematics Of A Robot The pose of a robot arm is described by all joints (all dofs). To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Each dof is typically associated with a joint variable. Kinematics is geometry of motion. The kinematics of a robot relate the joint angles of a robot to. Kinematics Of A Robot.
From www.marginallyclever.com
Robot Arm Kinematics in Three.js Marginally Clever Robots Kinematics Of A Robot To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Each dof is typically associated with a joint variable. Kinematics is geometry of motion. The pose of a robot arm is described by all joints (all dofs). It is one of the most fundamental disciplines in robotics, providing tools for. Kinematics Of A Robot.
From robocademy.com
Robot Kinematics in a Nutshell Kinematics Of A Robot The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. Kinematics is geometry of motion. Each dof is typically associated with a joint variable. A robot's configuration is a minimal expression of its links position, and usually consists of the. To start, we will see a light overview of the robot. Kinematics Of A Robot.
From www.researchgate.net
Inverse kinematics problem of 3DOF robot arm in 2D plane. (a) Three Kinematics Of A Robot Each dof is typically associated with a joint variable. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: In course 2 of the specialization, robot kinematics, you will learn to. Kinematics Of A Robot.
From www.chegg.com
5. ScaRA Robot Inverse Kinematics Consider The RR... Kinematics Of A Robot To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. Kinematics is geometry of motion. The pose of. Kinematics Of A Robot.
From www.cs.princeton.edu
Inverse Kinematics Kinematics Of A Robot The pose of a robot arm is described by all joints (all dofs). The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. Kinematics is geometry of motion. Each dof is typically associated with a joint variable. A robot's configuration is a minimal expression of its links position, and usually consists. Kinematics Of A Robot.
From hackaday.com
Getting Started With Geometric Algebra For Robotics, Computer Vision Kinematics Of A Robot The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. The pose of a robot arm is described by all joints (all dofs). In course 2 of the specialization, robot kinematics, you will learn. Kinematics Of A Robot.
From robotics.stackexchange.com
robotic arm Analytical solution to inverse kinematics of 5 dof robot Kinematics Of A Robot To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. Kinematics is geometry of motion. Each dof is typically associated with a joint variable. In course 2 of the specialization, robot. Kinematics Of A Robot.
From gramaziokohler.github.io
compas_fab Kinematic model Kinematics Of A Robot To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Kinematics is geometry of motion. Forward kinematics (fk) is to derive the relationship between joint. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. Each dof is typically associated with. Kinematics Of A Robot.
From www.youtube.com
Forward Kinematics Link and Joint Parameters YouTube Kinematics Of A Robot Forward kinematics (fk) is to derive the relationship between joint. The pose of a robot arm is described by all joints (all dofs). Each dof is typically associated with a joint variable. Kinematics is geometry of motion. A robot's configuration is a minimal expression of its links position, and usually consists of the. It is one of the most fundamental. Kinematics Of A Robot.
From medium.com
Inverse Kinematics in Robotics using Reinforcement Learning by Kinematics Of A Robot A robot's configuration is a minimal expression of its links position, and usually consists of the. Forward kinematics (fk) is to derive the relationship between joint. Kinematics is geometry of motion. Each dof is typically associated with a joint variable. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics:. Kinematics Of A Robot.
From www.mdpi.com
Applied Sciences Free FullText A MultiObjective Modified PSO for Kinematics Of A Robot In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. Each dof is typically associated with a joint variable. A robot's configuration is a minimal expression of its links position, and usually consists of the. Kinematics is geometry. Kinematics Of A Robot.
From www.mdpi.com
Applied Sciences Free FullText Design and Implementation of a Kinematics Of A Robot Each dof is typically associated with a joint variable. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. A robot's configuration is a minimal expression of its links position, and usually consists of. Kinematics Of A Robot.
From www.researchgate.net
SCS trajectory kinematics motion for a 4DOF leg of hexapod robot model Kinematics Of A Robot It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. The pose of a robot arm is described by all joints (all dofs). To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Kinematics is geometry of motion. The kinematics of a robot. Kinematics Of A Robot.
From www.youtube.com
Forward Kinematics Example of 2 and 3 DoF Robot Manipulators YouTube Kinematics Of A Robot It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Forward kinematics (fk) is to derive the relationship between joint. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: The kinematics of a robot relate the joint angles of a robot to. Kinematics Of A Robot.
From www.youtube.com
Part 1 How to Solve Inverse Kinematics of a 4 Leg Robot YouTube Kinematics Of A Robot A robot's configuration is a minimal expression of its links position, and usually consists of the. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Each dof is typically associated with a joint variable. To start, we will see a light overview of the robot components before launching into the basics of. Kinematics Of A Robot.
From skill-lync.com
Forward Kinematics of 2R Robotic Arm SkillLync Kinematics Of A Robot It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. A robot's configuration is a minimal expression of its links position, and usually consists of the. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. In course 2 of the specialization, robot kinematics,. Kinematics Of A Robot.
From www.researchgate.net
Inverse kinematics of robot leg V. EXPERIMENTAL RESULTS Download Kinematics Of A Robot Kinematics is geometry of motion. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. The pose of a robot arm is described by all joints (all dofs). It is one of the most fundamental disciplines in robotics,. Kinematics Of A Robot.
From gramaziokohler.github.io
compas_fab Forward and inverse kinematics Kinematics Of A Robot It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Forward kinematics (fk) is to derive the relationship between joint. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: The pose of a robot arm is described by all joints (all dofs).. Kinematics Of A Robot.
From www.slideshare.net
Chapter 2 robot kinematics Kinematics Of A Robot Each dof is typically associated with a joint variable. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Forward kinematics (fk) is to derive the relationship between joint. Kinematics is geometry of motion. To start, we will see a light overview of the robot components before launching into the basics of forward. Kinematics Of A Robot.
From www.semanticscholar.org
[PDF] Inverse kinematics for industrial robots using conformal Kinematics Of A Robot A robot's configuration is a minimal expression of its links position, and usually consists of the. It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. Forward kinematics (fk) is to derive the relationship between joint. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of. Kinematics Of A Robot.
From automaticaddison.com
What is Robot Kinematics? Automatic Addison Kinematics Of A Robot Each dof is typically associated with a joint variable. Forward kinematics (fk) is to derive the relationship between joint. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: The pose of a robot arm is described by all joints (all dofs). In course 2 of the specialization, robot kinematics,. Kinematics Of A Robot.
From github.com
GitHub Gabryxx7/RobotArmHelix 3D Simulation, forward and inverse Kinematics Of A Robot The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. The pose of a robot arm is described by all joints (all dofs). To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Forward kinematics (fk) is to derive the relationship. Kinematics Of A Robot.
From www.slideserve.com
PPT Kinematics of Robot Manipulator PowerPoint Presentation, free Kinematics Of A Robot A robot's configuration is a minimal expression of its links position, and usually consists of the. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. Each dof is typically associated with a joint variable. Kinematics is geometry. Kinematics Of A Robot.
From www.semanticscholar.org
[PDF] Solving Kinematics Problems of a 6DOF Robot Manipulator Kinematics Of A Robot Kinematics is geometry of motion. To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: Each dof is typically associated with a joint variable. A robot's configuration is a minimal expression of its links position, and usually consists of the. Forward kinematics (fk) is to derive the relationship between joint.. Kinematics Of A Robot.
From www.youtube.com
Inverse Kinematics of SCARA and 6DoF Industrial Robots YouTube Kinematics Of A Robot To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of. Kinematics Of A Robot.
From www.mdpi.com
Robotics Free FullText Virtual UR5 Robot for Online Learning of Kinematics Of A Robot The pose of a robot arm is described by all joints (all dofs). To start, we will see a light overview of the robot components before launching into the basics of forward kinematics: It is one of the most fundamental disciplines in robotics, providing tools for describing the structure and. A robot's configuration is a minimal expression of its links. Kinematics Of A Robot.
From robodk.com
Inverse Kinematics in Robotics What You Need to Know RoboDK blog Kinematics Of A Robot In course 2 of the specialization, robot kinematics, you will learn to solve the forward kinematics (calculating the configuration of the hand of the robot based on the joint values) using the. The kinematics of a robot relate the joint angles of a robot to the coordinate frames of its links. To start, we will see a light overview of. Kinematics Of A Robot.