Opencv Camera Calibration Checkerboard Size . A collection of images with points whose 2d image coordinates and 3d world. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Perform camera calibration using the captured image. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. In summary, a camera calibration algorithm has the following inputs and outputs. It includes functions to calculate. Capture the image with left, right camera. I am working on a camera calibration program using the opencv/python example (from:
from docs.opencv.org
Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. I am working on a camera calibration program using the opencv/python example (from: A collection of images with points whose 2d image coordinates and 3d world. Perform camera calibration using the captured image. It includes functions to calculate. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. In summary, a camera calibration algorithm has the following inputs and outputs. Capture the image with left, right camera.
OpenCV Camera Calibration and 3D Reconstruction
Opencv Camera Calibration Checkerboard Size Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. I am working on a camera calibration program using the opencv/python example (from: Perform camera calibration using the captured image. In summary, a camera calibration algorithm has the following inputs and outputs. It includes functions to calculate. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Capture the image with left, right camera. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: A collection of images with points whose 2d image coordinates and 3d world.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Perform camera calibration using the captured image. A collection of images with points whose 2d image coordinates and 3d world. It includes functions to calculate. I am working on a camera calibration program using the opencv/python example (from: Capture the image with. Opencv Camera Calibration Checkerboard Size.
From www.pdfprof.com
opencv camera calibration c Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Perform camera calibration using the captured image. It includes functions to calculate. In summary, a camera calibration algorithm has the following inputs and outputs. Capture the image with. Opencv Camera Calibration Checkerboard Size.
From forum.opencv.org
Camera Calibration not converging with images from Sony A6000 Python Opencv Camera Calibration Checkerboard Size Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In summary, a camera calibration algorithm has the following inputs and outputs. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. I am working on a camera calibration program using the opencv/python. Opencv Camera Calibration Checkerboard Size.
From forum.opencv.org
Why does cv2.findCircleGrid not accept calibration patterns that are Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: Perform camera calibration using the captured image. A collection of images with points whose 2d image coordinates and 3d world. In summary, a camera calibration algorithm has the following inputs and outputs. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera. Opencv Camera Calibration Checkerboard Size.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Perform camera. Opencv Camera Calibration Checkerboard Size.
From jsss.copernicus.org
JSSS Iterative feature detection of a coded checkerboard target for Opencv Camera Calibration Checkerboard Size A collection of images with points whose 2d image coordinates and 3d world. In summary, a camera calibration algorithm has the following inputs and outputs. Perform camera calibration using the captured image. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Capture the image with left, right camera. In opencv,. Opencv Camera Calibration Checkerboard Size.
From www.testargets.com
China Custom Camera Calibration with Opencv Manufacturers Suppliers Opencv Camera Calibration Checkerboard Size In summary, a camera calibration algorithm has the following inputs and outputs. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Perform camera. Opencv Camera Calibration Checkerboard Size.
From learnopencv.com
Camera Calibration using OpenCV LearnOpenCV Opencv Camera Calibration Checkerboard Size In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Perform camera calibration using the captured image. I am working on a camera calibration. Opencv Camera Calibration Checkerboard Size.
From www.oceanproperty.co.th
Calibration Patterns Explained , 46 OFF Opencv Camera Calibration Checkerboard Size Perform camera calibration using the captured image. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Capture the image with left, right camera. I am working on a camera calibration program using the opencv/python example (from: Create a checkerboard pattern in file. Opencv Camera Calibration Checkerboard Size.
From www.youtube.com
Camera calibration With OpenCV Chessboard or asymmetrical circle Opencv Camera Calibration Checkerboard Size Capture the image with left, right camera. A collection of images with points whose 2d image coordinates and 3d world. I am working on a camera calibration program using the opencv/python example (from: Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In summary, a camera calibration algorithm has the following. Opencv Camera Calibration Checkerboard Size.
From www.pdfprof.com
camera calibration with checkerboard Opencv Camera Calibration Checkerboard Size Perform camera calibration using the captured image. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: A collection of images with points whose 2d image coordinates and 3d world. In summary, a camera calibration algorithm has the following inputs and outputs. Checkerboard calibration using opencv this project provides a set of. Opencv Camera Calibration Checkerboard Size.
From answers.opencv.org
Camera Pose from Checkerboard Pose OpenCV Q&A Forum Opencv Camera Calibration Checkerboard Size Perform camera calibration using the captured image. A collection of images with points whose 2d image coordinates and 3d world. In summary, a camera calibration algorithm has the following inputs and outputs. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera which returns the distortion coefficient. Opencv Camera Calibration Checkerboard Size.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size It includes functions to calculate. In summary, a camera calibration algorithm has the following inputs and outputs. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Perform camera calibration using the captured image. A collection of images with points whose 2d image. Opencv Camera Calibration Checkerboard Size.
From stackoverflow.com
camera calibration OpenCV Radon Checkerboard Stack Overflow Opencv Camera Calibration Checkerboard Size A collection of images with points whose 2d image coordinates and 3d world. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: It includes functions to calculate. Capture the image with left,. Opencv Camera Calibration Checkerboard Size.
From docs.opencv.org
OpenCV Camera Calibration and 3D Reconstruction Opencv Camera Calibration Checkerboard Size In summary, a camera calibration algorithm has the following inputs and outputs. Perform camera calibration using the captured image. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: I am working on. Opencv Camera Calibration Checkerboard Size.
From www.optical-elements.com
Calibration target,Calibration test board Optry tech Co.,Ltd Opencv Camera Calibration Checkerboard Size In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Capture the image with left, right camera. Perform camera calibration using the captured image. A collection of images with points whose 2d image coordinates and 3d world. I am working on a camera. Opencv Camera Calibration Checkerboard Size.
From www.testargets.com
China Custom Camera Calibration with Opencv Manufacturers Suppliers Opencv Camera Calibration Checkerboard Size Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. In summary, a camera calibration algorithm has the following inputs and outputs. A collection of images with points whose 2d image coordinates and 3d world. It includes functions to calculate. In opencv, there is cv.calibratecamera which returns the distortion coefficient which. Opencv Camera Calibration Checkerboard Size.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size In summary, a camera calibration algorithm has the following inputs and outputs. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. It includes functions to calculate. Capture the image with left, right camera. Checkerboard calibration using opencv this project provides a set. Opencv Camera Calibration Checkerboard Size.
From awesomeopensource.com
Opencv Camera Calibration Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Capture the. Opencv Camera Calibration Checkerboard Size.
From www.pianshen.com
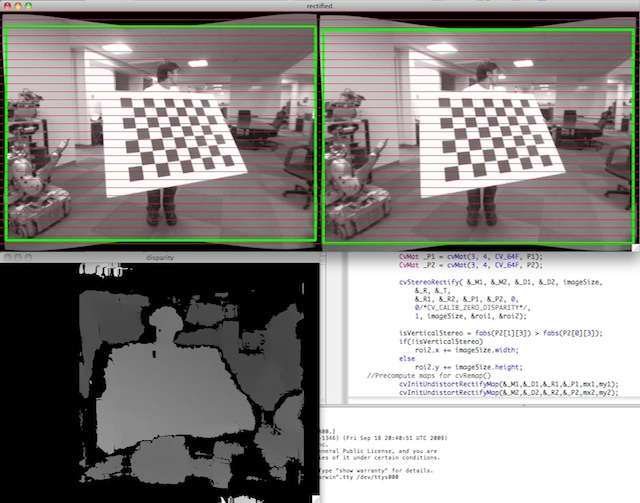
Camera Calibration and Stereo Vison Reconstruction 程序员大本营 Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: It includes functions to calculate. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Capture the image with left, right camera. A collection of images with points whose 2d image coordinates and 3d world. In opencv, there is. Opencv Camera Calibration Checkerboard Size.
From www.testargets.com
China Custom Camera Calibration with Opencv Manufacturers Suppliers Opencv Camera Calibration Checkerboard Size It includes functions to calculate. Capture the image with left, right camera. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. I am working on a camera calibration program using the opencv/python example (from: A collection of images with points whose 2d. Opencv Camera Calibration Checkerboard Size.
From forum.opencv.org
Making a checkerboard for UV Camera Calibration calib3d OpenCV Opencv Camera Calibration Checkerboard Size In summary, a camera calibration algorithm has the following inputs and outputs. Capture the image with left, right camera. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. I am working on a camera calibration program using the opencv/python example (from: Perform. Opencv Camera Calibration Checkerboard Size.
From www.youtube.com
OpenCV Basics 17 Camera Calibration Part 3 YouTube Opencv Camera Calibration Checkerboard Size Perform camera calibration using the captured image. I am working on a camera calibration program using the opencv/python example (from: A collection of images with points whose 2d image coordinates and 3d world. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: It includes functions to calculate. In opencv, there is. Opencv Camera Calibration Checkerboard Size.
From www.kudan.io
How to Calibrate a Camera for Visual SLAM (1 of 2) Kudan global Opencv Camera Calibration Checkerboard Size It includes functions to calculate. Perform camera calibration using the captured image. I am working on a camera calibration program using the opencv/python example (from: In summary, a camera calibration algorithm has the following inputs and outputs. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera. Opencv Camera Calibration Checkerboard Size.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: In summary, a camera calibration algorithm has the following inputs and outputs. It includes functions to calculate. Perform camera calibration using the captured image. A collection of images with points whose 2d image coordinates and 3d world. In opencv, there is cv.calibratecamera which returns the distortion coefficient. Opencv Camera Calibration Checkerboard Size.
From itqna.net
Calibration of stereo camera through the chessboard in openCV It_qna Opencv Camera Calibration Checkerboard Size Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera. Opencv Camera Calibration Checkerboard Size.
From www.researchgate.net
Calibration Boards. (a) Opencv 9 × 6 checkerboard; (b) Opencv Opencv Camera Calibration Checkerboard Size I am working on a camera calibration program using the opencv/python example (from: In summary, a camera calibration algorithm has the following inputs and outputs. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Create a checkerboard pattern in file chessboard.svg with. Opencv Camera Calibration Checkerboard Size.
From stackoverflow.com
How to get 4 distortion elements with opencv camera calibration Opencv Camera Calibration Checkerboard Size It includes functions to calculate. A collection of images with points whose 2d image coordinates and 3d world. Capture the image with left, right camera. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a. Opencv Camera Calibration Checkerboard Size.
From forum.opencv.org
Actual size of check block when performing camera calibration? Python Opencv Camera Calibration Checkerboard Size A collection of images with points whose 2d image coordinates and 3d world. In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1 and p2 represent net. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: Checkerboard calibration. Opencv Camera Calibration Checkerboard Size.
From www.researchgate.net
Calibration Boards. (a) Opencv 9 × 6 checkerboard; (b) Opencv Opencv Camera Calibration Checkerboard Size It includes functions to calculate. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. I am working on a camera calibration program using the opencv/python example (from: Capture the image with left, right camera. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size. Opencv Camera Calibration Checkerboard Size.
From markhedleyjones.com
Calibration Checkerboard Collection Mark Hedley Jones Opencv Camera Calibration Checkerboard Size Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: I am working on a camera calibration program using the opencv/python example (from: Perform camera calibration using the captured image. Capture the image with left, right camera. A collection of images with points whose 2d image coordinates and 3d world. In summary,. Opencv Camera Calibration Checkerboard Size.
From laptopprocessors.ru
Stereo calibration opencv python Opencv Camera Calibration Checkerboard Size Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. Perform camera calibration using the captured image. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In summary, a camera calibration algorithm has the following inputs and outputs. It includes functions to. Opencv Camera Calibration Checkerboard Size.
From www.cvlibs.net
Andreas Geiger Opencv Camera Calibration Checkerboard Size In summary, a camera calibration algorithm has the following inputs and outputs. Perform camera calibration using the captured image. Checkerboard calibration using opencv this project provides a set of functions to calibrate a camera using a checkerboard pattern. I am working on a camera calibration program using the opencv/python example (from: Capture the image with left, right camera. It includes. Opencv Camera Calibration Checkerboard Size.
From www.youtube.com
Camera Calibration using OpenCV YouTube Opencv Camera Calibration Checkerboard Size Capture the image with left, right camera. In summary, a camera calibration algorithm has the following inputs and outputs. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: In opencv, there is cv.calibratecamera which returns the distortion coefficient which includes the coefficients k1 through k6 representing net radial distortion while p1. Opencv Camera Calibration Checkerboard Size.
From forum.opencv.org
Camera Calibration w/ Checkerboard not working Python OpenCV Opencv Camera Calibration Checkerboard Size A collection of images with points whose 2d image coordinates and 3d world. Create a checkerboard pattern in file chessboard.svg with 9 rows, 6 columns and a square size of 20mm: It includes functions to calculate. Perform camera calibration using the captured image. Capture the image with left, right camera. I am working on a camera calibration program using the. Opencv Camera Calibration Checkerboard Size.