Differential Kinematics Of Motion . There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. • each column describes the motion at the end effector due to the motion of that joint only. • for each joint, i, pretend all the other joints are. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Kinematics of differential drive robots. Our logistics robot had super simple kinematics: Many mobile robots use a drive mechanism known as differential drive. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. It consists of 2 drive wheels. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian.
from www.chegg.com
Kinematics of differential drive robots. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. • each column describes the motion at the end effector due to the motion of that joint only. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • for each joint, i, pretend all the other joints are. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. It consists of 2 drive wheels. Our logistics robot had super simple kinematics: Many mobile robots use a drive mechanism known as differential drive. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of.
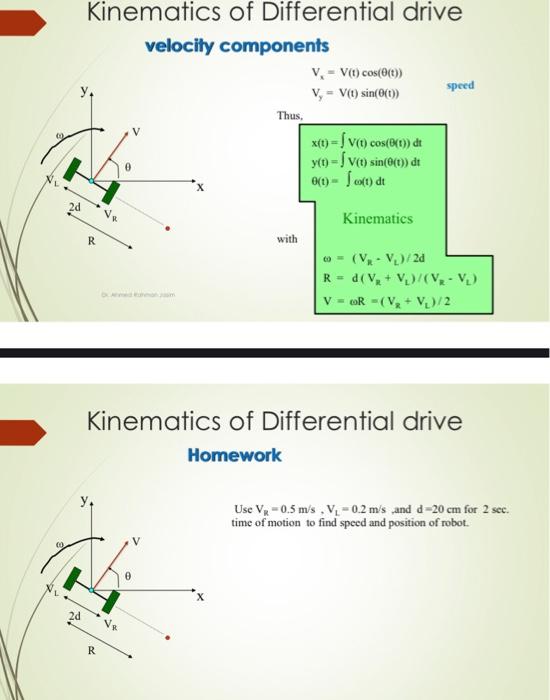
Solved Kinematics of Differential drive velocily components
Differential Kinematics Of Motion In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. It consists of 2 drive wheels. • for each joint, i, pretend all the other joints are. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Our logistics robot had super simple kinematics: We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. • each column describes the motion at the end effector due to the motion of that joint only.
From www.slideserve.com
PPT Attitude Kinematics PowerPoint Presentation ID1225721 Differential Kinematics Of Motion Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. There are a number of related approaches to kinematic. Differential Kinematics Of Motion.
From www.youtube.com
Kinematic Equation for Differential Drive YouTube Differential Kinematics Of Motion It consists of 2 drive wheels. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Kinematics of differential drive robots. Many mobile robots use a drive mechanism known as differential. Differential Kinematics Of Motion.
From www.slideserve.com
PPT Kinematics Kinematic Equations PowerPoint Presentation, free Differential Kinematics Of Motion It consists of 2 drive wheels. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. • for each joint, i, pretend. Differential Kinematics Of Motion.
From www.youtube.com
Differential Kinematics Part 1 YouTube Differential Kinematics Of Motion • for each joint, i, pretend all the other joints are. • each column describes the motion at the end effector due to the motion of that joint only. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric. Differential Kinematics Of Motion.
From thirdspacelearning.com
Kinematics Formula GCSE Maths Steps, Examples & Worksheet Differential Kinematics Of Motion • for each joint, i, pretend all the other joints are. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. Our logistics robot had super simple kinematics: • each column describes the motion at the end effector. Differential Kinematics Of Motion.
From www.youtube.com
2D Motion Equations and summary YouTube Differential Kinematics Of Motion Kinematics of differential drive robots. Many mobile robots use a drive mechanism known as differential drive. • for each joint, i, pretend all the other joints are. • each column describes the motion at the end effector due to the motion of that joint only. In this section we will discuss singularity and redundancy, and obtain general properties of differential. Differential Kinematics Of Motion.
From www.youtube.com
Detailed and Correct Derivation of Kinematics Equations of Differential Differential Kinematics Of Motion In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Kinematics of differential drive robots. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. • each column describes the motion at the end effector due to the motion of that joint only. Many mobile. Differential Kinematics Of Motion.
From www.youtube.com
Equations of Motion for Differential Drive Robots YouTube Differential Kinematics Of Motion It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. • each column describes. Differential Kinematics Of Motion.
From www.slideserve.com
PPT Differential Kinematics and Statics Ref 理论力学,洪嘉振,杨长俊,高等教育出版社 Differential Kinematics Of Motion Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. • for each joint, i, pretend all the other joints are. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • each column describes the motion at the end effector due to the motion of that joint. Differential Kinematics Of Motion.
From www.youtube.com
Differential Equations Motion of a Spring YouTube Differential Kinematics Of Motion It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then. Differential Kinematics Of Motion.
From studylib.net
MECHANICS KINEMATICS Differential Kinematics Of Motion There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. • for each joint, i, pretend all the other joints are. It consists of 2 drive wheels. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. In this section we. Differential Kinematics Of Motion.
From www.semanticscholar.org
Figure 1 from Inverse kinematics of a twowheeled differential drive an Differential Kinematics Of Motion There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. • each column describes the motion at the end effector due to the motion of that joint only. Our logistics robot had super simple kinematics: We can derive the relationship between wheel rotation and robot. Differential Kinematics Of Motion.
From www.youtube.com
KINEMATICS OF PARTICLES RECTILINEAR MOTION YouTube Differential Kinematics Of Motion Kinematics of differential drive robots. • for each joint, i, pretend all the other joints are. • each column describes the motion at the end effector due to the motion of that joint only. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. We can derive the relationship. Differential Kinematics Of Motion.
From www.youtube.com
L04.3 Dynamics Lesson 4.3 Cylindrical Coordinate Kinematics YouTube Differential Kinematics Of Motion Our logistics robot had super simple kinematics: We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. • for each joint, i, pretend all the other joints are. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either. Differential Kinematics Of Motion.
From www.youtube.com
Differential Drive Robot Solution of Forward Kinematics and Simulation Differential Kinematics Of Motion We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. • each column describes the motion at the end effector due to the motion of that joint only. • for each joint, i, pretend all the other joints are. There are a number of related approaches to. Differential Kinematics Of Motion.
From www.csimmslab.com
Computational modelling of a bouncing ball using differential equations Differential Kinematics Of Motion Our logistics robot had super simple kinematics: Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. We can derive the relationship between wheel rotation and robot velocity by considering first. Differential Kinematics Of Motion.
From theeducationlife.com
What Are The Kinematic Formulas? The Education Differential Kinematics Of Motion In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Many mobile robots use a drive mechanism known as differential drive. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Relations between motion. Differential Kinematics Of Motion.
From acejee.com
IIT & JEE Main Physics Kinematics (All you need to know) Differential Kinematics Of Motion There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. It consists of 2 drive wheels. We can derive the relationship between wheel rotation and robot velocity by considering first the. Differential Kinematics Of Motion.
From www.youtube.com
First Equation of Motion Derivation by Calculus Method and Use YouTube Differential Kinematics Of Motion It consists of 2 drive wheels. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • for each joint, i, pretend all the other joints are. Many mobile robots use a drive mechanism known as differential drive. Our logistics robot had super simple kinematics: In this section we will discuss singularity. Differential Kinematics Of Motion.
From www.semanticscholar.org
Figure 1 from Comprehensive theory of differential kinematics and Differential Kinematics Of Motion • each column describes the motion at the end effector due to the motion of that joint only. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Kinematics of differential drive robots. Many mobile robots use a drive mechanism known as differential drive. We can derive the relationship. Differential Kinematics Of Motion.
From www.researchgate.net
(PDF) Kepler's laws as properties of the kinematic equations of motion Differential Kinematics Of Motion Kinematics of differential drive robots. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Our logistics robot had super simple kinematics: Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • each column describes the motion at. Differential Kinematics Of Motion.
From www.semanticscholar.org
Figure 2 from Inverse kinematics of a twowheeled differential drive an Differential Kinematics Of Motion Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Kinematics of differential drive robots. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or. Differential Kinematics Of Motion.
From www.youtube.com
AMR Segment 3 Video 2 Differential Kinematics Wheeled YouTube Differential Kinematics Of Motion • each column describes the motion at the end effector due to the motion of that joint only. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either. Differential Kinematics Of Motion.
From mungfali.com
Kinematics Formula Sheet Differential Kinematics Of Motion There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. • each column describes the motion at the end effector due to the motion of that joint only. It consists of 2 drive wheels. Our logistics robot had super simple kinematics: Relations between motion (velocity). Differential Kinematics Of Motion.
From byjus.com
Derive kinematic equation for uniform motion Differential Kinematics Of Motion There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Our logistics robot had super simple kinematics: It consists of 2 drive. Differential Kinematics Of Motion.
From www.youtube.com
Differential equations and Newton's 2nd law YouTube Differential Kinematics Of Motion • for each joint, i, pretend all the other joints are. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. There are a number of related approaches to. Differential Kinematics Of Motion.
From www.youtube.com
Newton Euler equation of motion Vehicle roll dynamics YouTube Differential Kinematics Of Motion Kinematics of differential drive robots. Our logistics robot had super simple kinematics: Many mobile robots use a drive mechanism known as differential drive. • for each joint, i, pretend all the other joints are. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. We can derive the relationship between wheel rotation and robot velocity by. Differential Kinematics Of Motion.
From www.vrogue.co
Derive Kinematic Equations Of Motion For Constant Acc vrogue.co Differential Kinematics Of Motion Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • for each joint, i, pretend all the other joints are. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Relations between motion (velocity) in joint space and. Differential Kinematics Of Motion.
From www.youtube.com
Kinematics of Differential Drive Robots and Odometry YouTube Differential Kinematics Of Motion Many mobile robots use a drive mechanism known as differential drive. • each column describes the motion at the end effector due to the motion of that joint only. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Our logistics robot had super simple. Differential Kinematics Of Motion.
From aleksandarhaber.com
Clear and Detailed Explanation of Kinematics, Equations, and Geometry Differential Kinematics Of Motion • each column describes the motion at the end effector due to the motion of that joint only. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which differ either by their parameterization or by the. Two different methods. Differential Kinematics Of Motion.
From slideplayer.com
DIFFERENTIAL KINEMATICS ppt download Differential Kinematics Of Motion It consists of 2 drive wheels. Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. Our logistics robot had super simple kinematics: Many mobile robots use a drive mechanism known as differential drive. • for each joint, i, pretend all the other joints are. Kinematics of differential drive robots. Relations between. Differential Kinematics Of Motion.
From www.youtube.com
Kinematics (Part 7 Projectile Motion Example) YouTube Differential Kinematics Of Motion Many mobile robots use a drive mechanism known as differential drive. • for each joint, i, pretend all the other joints are. Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Our logistics robot had super simple kinematics: We can derive the relationship between wheel rotation and robot velocity by considering first the motion of. Differential Kinematics Of Motion.
From www.tessshebaylo.com
Derive Kinematic Equations Of Motion For Constant Acceleration Differential Kinematics Of Motion We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. • for each joint, i, pretend all the other joints are. In this section we will discuss singularity and redundancy, and obtain general properties of differential motion for general n degree of. Two different methods for attaining. Differential Kinematics Of Motion.
From www.chegg.com
Solved Kinematics of Differential drive velocily components Differential Kinematics Of Motion • for each joint, i, pretend all the other joints are. Our logistics robot had super simple kinematics: Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. We can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering. Kinematics. Differential Kinematics Of Motion.
From www.slideserve.com
PPT Rotational Mechanics PowerPoint Presentation, free download ID Differential Kinematics Of Motion Two different methods for attaining the jacobian will be discussed, i.e, the analytical jacobian and the geometric jacobian. • each column describes the motion at the end effector due to the motion of that joint only. Our logistics robot had super simple kinematics: There are a number of related approaches to kinematic trajectory optimization in the motion planning literature, which. Differential Kinematics Of Motion.