Roll Pitch Yaw X Y Z Matrix . The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. Yaw is the rotation about the z axis. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. How can i determine the rotation angles a, b, and c? The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The unit of measurement of.
from www.fuyumotion.com
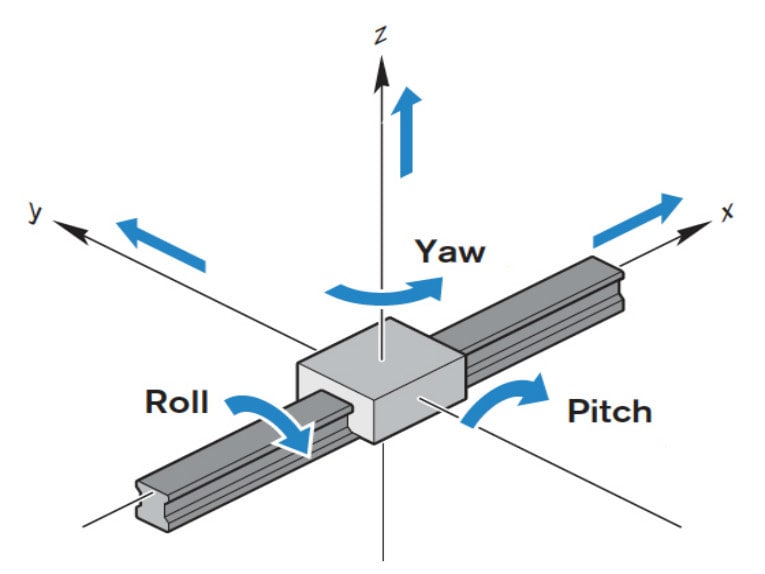
The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The unit of measurement of. How can i determine the rotation angles a, b, and c? Yaw is the rotation about the z axis. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion.
Motion basics How to define roll, pitch, and yaw for linear systems
Roll Pitch Yaw X Y Z Matrix The unit of measurement of. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. The unit of measurement of. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. How can i determine the rotation angles a, b, and c? This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Yaw is the rotation about the z axis. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion.
From blogoundrium.blogspot.com
3D Rotational Matrix (Matriks rotasi 3 dimensi) Roll, Pitch, dan Yaw Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Online calculator. Roll Pitch Yaw X Y Z Matrix.
From math.stackexchange.com
geometry 3D Coordinate Rotation Using RollPitchYaw Mathematics Stack Exchange Roll Pitch Yaw X Y Z Matrix Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from. Roll Pitch Yaw X Y Z Matrix.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in [°],not angular velocity Roll Pitch Yaw X Y Z Matrix How can i determine the rotation angles a, b, and c? Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the. Roll Pitch Yaw X Y Z Matrix.
From www.tkk-air.co.jp
Inertial Sensors Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. The unit of measurement of. I'm trying to figure out how to transform a pose given with. Roll Pitch Yaw X Y Z Matrix.
From www.researchgate.net
Quadrotor helicopter configuration with RollPitchYaw Euler angles [φ,... Download Scientific Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. How can i determine the rotation angles a, b, and c? To define roll, pitch, and yaw in linear systems, we first need to establish the. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Robot Kinematics II PowerPoint Presentation, free download ID579636 Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Roll pitch yaw (rpy) convention rotation about x0 of angle. Roll Pitch Yaw X Y Z Matrix.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Roll. Roll Pitch Yaw X Y Z Matrix.
From mnurq.blogspot.com
Catatanku Memahami Sudut Euler dan Matriks Rotasi Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: The unit of measurement of. Yaw is the rotation about the z axis. The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. The two axes of the horizontal plane are typically defined as. Roll Pitch Yaw X Y Z Matrix.
From www.mathworks.com
Coordinate Systems in Automated Driving Toolbox MATLAB & Simulink Roll Pitch Yaw X Y Z Matrix Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. To define roll, pitch, and yaw in linear systems, we. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Rotações e Quatérnios PowerPoint Presentation, free download ID5734032 Roll Pitch Yaw X Y Z Matrix The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Yaw is the rotation about the z axis. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed. Roll Pitch Yaw X Y Z Matrix.
From math.stackexchange.com
geometry 3D Coordinate Rotation Using RollPitchYaw Mathematics Stack Exchange Roll Pitch Yaw X Y Z Matrix How can i determine the rotation angles a, b, and c? To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. The unit of measurement of.. Roll Pitch Yaw X Y Z Matrix.
From blog.csdn.net
关于三维方面roll,pitch,yaw角度_三维角度CSDN博客 Roll Pitch Yaw X Y Z Matrix Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I'm trying to figure out how to transform a pose given with euler angles roll (righthanded. Roll Pitch Yaw X Y Z Matrix.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. The unit of measurement of. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. I'm trying to figure out how to transform a pose. Roll Pitch Yaw X Y Z Matrix.
From www.pinterest.com
Axis rotations (pitch, yaw and roll) and translation specified by a... Download Scientific Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Yaw is the rotation about the z axis. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Roll pitch. Roll Pitch Yaw X Y Z Matrix.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Matrices and Python Code Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. How can i determine the rotation angles a, b, and c? I'm trying to. Roll Pitch Yaw X Y Z Matrix.
From pterneas.com
Kinect Joint Rotation The Definitive Guide Vangos Pterneas Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion.. Roll Pitch Yaw X Y Z Matrix.
From www.alamy.es
Roll pitch y yaw el plano del movimiento de cada canal semicircular Fotografía de stock Alamy Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Yaw is the rotation about the z axis. The y axis is orthogonal (perpendicular) to the direction of. Roll Pitch Yaw X Y Z Matrix.
From velog.io
Rotation Yaw, Pitch, Roll Roll Pitch Yaw X Y Z Matrix The unit of measurement of. How can i determine the rotation angles a, b, and c? Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Yaw. Roll Pitch Yaw X Y Z Matrix.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Roll Pitch Yaw X Y Z Matrix The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Roll Pitch Yaw X Y Z Matrix How can i determine the rotation angles a, b, and c? This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I'm trying to figure out how to transform a pose given with euler angles. Roll Pitch Yaw X Y Z Matrix.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The unit of measurement of. This function calculates the 3d rotation of a body/vector. Roll Pitch Yaw X Y Z Matrix.
From www.pngitem.com
Camera Yaw Pitch Roll, HD Png Download , Transparent Png Image PNGitem Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are.. Roll Pitch Yaw X Y Z Matrix.
From www.fuyumotion.com
Motion basics How to define roll, pitch, and yaw for linear systems Roll Pitch Yaw X Y Z Matrix Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. To define roll, pitch, and yaw. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Roll Pitch Yaw X Y Z Matrix I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. This function calculates. Roll Pitch Yaw X Y Z Matrix.
From ista.org
International Safe Transit Association Roll Pitch Yaw X Y Z Matrix The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of. Roll Pitch Yaw X Y Z Matrix.
From cg.robasworld.com
Coordinate System Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. The two axes of the horizontal plane are typically defined as x and y, with. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT IAR234 Robótica PowerPoint Presentation, free download ID619839 Roll Pitch Yaw X Y Z Matrix The unit of measurement of. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0. Roll Pitch Yaw X Y Z Matrix.
From www.researchgate.net
Pitch, Roll and Yaw Against the XYZ Axis, own figure Download Scientific Diagram Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. Roll pitch yaw (rpy) convention rotation about x0 of. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Introduction to Robotics cpsc 460 PowerPoint Presentation, free download ID5558242 Roll Pitch Yaw X Y Z Matrix Yaw is the rotation about the z axis. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. To define roll, pitch, and yaw in linear. Roll Pitch Yaw X Y Z Matrix.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Roll Pitch Yaw X Y Z Matrix The y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane. The unit of measurement of. How can i determine the rotation angles a, b, and c? The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Roll pitch. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Roll Pitch Yaw X Y Z Matrix Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: How can i determine the rotation angles a, b, and c? The unit of. Roll Pitch Yaw X Y Z Matrix.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Addison Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. How can i determine the rotation angles a, b, and c? Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about. Roll Pitch Yaw X Y Z Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Roll Pitch Yaw X Y Z Matrix To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix this function calculates the 3d rotation of a solid. The unit of measurement of. The y axis is orthogonal (perpendicular) to the direction of motion. Roll Pitch Yaw X Y Z Matrix.
From math.stackexchange.com
linear transformations Rotation with roll pitch and yaw in different coordinate system Roll Pitch Yaw X Y Z Matrix This function calculates the 3d rotation of a body/vector with euler angles according to the zyx convention. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Yaw is the rotation about the z axis. How can i determine the rotation angles a, b, and c?. Roll Pitch Yaw X Y Z Matrix.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Roll Pitch Yaw X Y Z Matrix The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. The unit of measurement of. Roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all rotations are. Yaw is the. Roll Pitch Yaw X Y Z Matrix.