Servo Pulse Width Chart . A pulse width of 1500. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. Servos are controlled by pulse width, the pulse width determines the horn angle. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. With a 1.5 ms pulse,. For example, if you have a servo with 180° turn, then 90° is the center position.
from webmotor.org
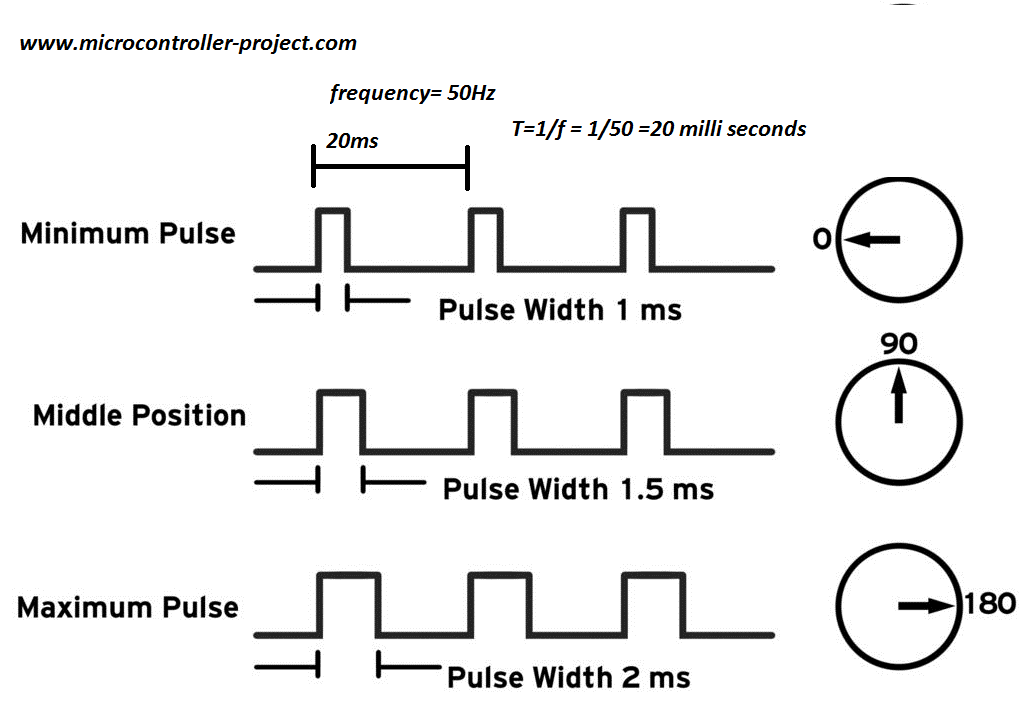
“duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. For example, if you have a servo with 180° turn, then 90° is the center position. Servos are controlled by pulse width, the pulse width determines the horn angle. A pulse width of 1500. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. With a 1.5 ms pulse,. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. A typical servo responds to pulse widths in the range 1000 to 2000 µs.
Servo Motor Pulse Width Calculator
Servo Pulse Width Chart A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A pulse width of 1500. Servos are controlled by pulse width, the pulse width determines the horn angle. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. With a 1.5 ms pulse,. A typical servo responds to pulse widths in the range 1000 to 2000 µs. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are.
From webmotor.org
Servo Motor Pulse Width Calculator Servo Pulse Width Chart With a 1.5 ms pulse,. A pulse width of 1500. For example, if you have a servo with 180° turn, then 90° is the center position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servos are controlled by pulse width, the pulse width determines the horn angle. The rev robotics expansion hub outputs an. Servo Pulse Width Chart.
From diyi0t.com
Servo Motor Tutorial for Arduino, ESP8266 and ESP32 Servo Pulse Width Chart The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. For example, if you have a servo. Servo Pulse Width Chart.
From www.youtube.com
servo motor angle calculation servo motor angle of rotation servo Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. Servos are controlled by pulse width, the pulse width determines the horn angle. For example, if. Servo Pulse Width Chart.
From slidetodoc.com
Servo Library and Functions include Servo h Servo Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are.. Servo Pulse Width Chart.
From www.youtube.com
Electronics Determine if servo pulse length is in a given range YouTube Servo Pulse Width Chart Servos are controlled by pulse width, the pulse width determines the horn angle. A pulse width of 1500. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or. Servo Pulse Width Chart.
From os.mbed.com
Projekt Servo Mbed Servo Pulse Width Chart “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. With a 1.5 ms pulse,. Servos are controlled by pulse width, the pulse width determines the horn angle. The rev robotics expansion hub outputs an extended rc servo. Servo Pulse Width Chart.
From www.researchgate.net
Pulsewidth modulation outputs from servos and motor during the flight Servo Pulse Width Chart A pulse width of 1500. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. For. Servo Pulse Width Chart.
From hocthatlamthat.edu.vn
Pulse Width Modulation (PWM) Real Group Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. With a 1.5 ms pulse,. Servos are controlled by pulse width, the pulse width determines the horn angle. A pulse width of 1500. The rev robotics. Servo Pulse Width Chart.
From webmotor.org
Servo Motor Pulse Width Calculator Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. The program executes properly on a button press. Servo Pulse Width Chart.
From dokumen.tips
(PPT) Example 12 PulseWidth Modulation (PWM) Motors and Servos Servo Pulse Width Chart A typical servo responds to pulse widths in the range 1000 to 2000 µs. A pulse width of 1500. For example, if you have a servo with 180° turn, then 90° is the center position. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A typical servo motor expects to be updated. Servo Pulse Width Chart.
From www.pololu.com
Pololu Simple hardware approach to controlling a servo Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. A pulse width of 1500. For example, if you have a servo with 180° turn, then 90° is the center position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servos are controlled by. Servo Pulse Width Chart.
From vhdlwhiz.com
RC servo controller using PWM from an FPGA pin VHDLwhiz Servo Pulse Width Chart I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. For example, if you have a servo with 180° turn, then 90° is the center position. Servos are controlled by pulse width, the pulse width determines the horn angle. A typical servo motor expects to be updated. Servo Pulse Width Chart.
From www.theengineeringprojects.com
Control Servo Motor with Raspberry Pi 4 using Python The Engineering Servo Pulse Width Chart Servos are controlled by pulse width, the pulse width determines the horn angle. With a 1.5 ms pulse,. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. For example, if you have a servo with 180° turn, then 90° is the center position. A pulse width. Servo Pulse Width Chart.
From slideplayer.com
Servos. ppt download Servo Pulse Width Chart Servos are controlled by pulse width, the pulse width determines the horn angle. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. With a 1.5 ms pulse,. The rev robotics expansion hub outputs. Servo Pulse Width Chart.
From arduino.stackexchange.com
pwm Trouble understanding min and max parameters for the Servo motor Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. With a 1.5 ms pulse,. For example, if you have a servo with 180° turn, then 90° is the center position.. Servo Pulse Width Chart.
From www.slideserve.com
PPT Example 12 PulseWidth Modulation (PWM) Motors and Servos Servo Pulse Width Chart A pulse width of 1500. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. For example, if you have a servo with 180° turn, then 90° is the center position. A. Servo Pulse Width Chart.
From www.neoteo.com
¿Cómo funcionan los servomotores? NeoTeo Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. For example, if you have a servo with 180° turn, then 90° is the center position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. With a 1.5 ms pulse,. A typical servo motor. Servo Pulse Width Chart.
From webmotor.org
Servo Motor Pulse Width Calculator Servo Pulse Width Chart Servos are controlled by pulse width, the pulse width determines the horn angle. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. I have come to the understanding that the position of a. Servo Pulse Width Chart.
From www.slideserve.com
PPT Example 12 PulseWidth Modulation (PWM) Motors and Servos Servo Pulse Width Chart The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. A typical servo responds. Servo Pulse Width Chart.
From webmotor.org
Servo Motor Pulse Width Calculator Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A pulse width of. Servo Pulse Width Chart.
From picockpit.com
How to control servo with Raspberry Pi Pico W and pulse width Servo Pulse Width Chart A typical servo responds to pulse widths in the range 1000 to 2000 µs. For example, if you have a servo with 180° turn, then 90° is the center position. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. With a 1.5 ms pulse,. Servos are controlled by pulse width, the. Servo Pulse Width Chart.
From www.youtube.com
servo motor pulse per mm calculation servo motor pulse calculation Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. With a 1.5 ms pulse,. Servos are controlled by pulse width, the pulse width determines the horn angle. A pulse width of 1500. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or. Servo Pulse Width Chart.
From html.alldatasheet.jp
SN76604N datasheet(6/9 Pages) TI BIDIRECTIONAL SERVOAMP PULSE WIDTH Servo Pulse Width Chart “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. I have come to the understanding. Servo Pulse Width Chart.
From www.motioncontroltips.com
How to Size and Select Servo Systems Servo Pulse Width Chart “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A pulse width of 1500. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servos are controlled by pulse width, the pulse width determines the horn angle. The rev robotics expansion hub outputs an extended rc servo. Servo Pulse Width Chart.
From webmotor.org
Servo Motor Pulse Width Calculator Servo Pulse Width Chart The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. Servos are controlled by pulse width, the pulse width determines the horn angle. With a 1.5 ms pulse,. A typical servo responds to pulse widths in the range 1000 to 2000 µs. I have come to the understanding that the position of a. Servo Pulse Width Chart.
From www.i-programmer.info
Exploring Edison Pulse Width Modulation Servo Pulse Width Chart A pulse width of 1500. With a 1.5 ms pulse,. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A typical servo motor expects to be updated every 20. Servo Pulse Width Chart.
From www.slideserve.com
PPT Big Dog’s Kryptonite controlling a RC car over a network Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo. Servo Pulse Width Chart.
From eng-resources.charlotte.edu
Servo Motors Product Theory UNC Charlotte Engineering Tool Kit Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. With a 1.5 ms pulse,. Servos are controlled by pulse width, the pulse width determines the horn angle. “duty cycle” is the width of positive pulse (square. Servo Pulse Width Chart.
From www.chegg.com
Solved 18. This is the pulse width length for HiTEC HS422 Servo Pulse Width Chart The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. A pulse width of 1500. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. Servos are controlled by pulse width, the pulse width determines the horn angle. I have come to. Servo Pulse Width Chart.
From www.globalspec.com
Servo MotorWorking Principle GlobalSpec Servo Pulse Width Chart “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A pulse width of 1500. A typical servo motor expects to be updated every 20 ms with a pulse between 1 ms and 2 ms, or in other words, between a 5 and 10% duty cycle on a 50 hz waveform. For. Servo Pulse Width Chart.
From www.vrogue.co
Stm32 Pwm Pulse Width Modulation Tutorial With Servo Motor Vrogue Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. For example, if you have a servo with 180° turn, then 90° is the center position. Servos are controlled by pulse width, the pulse width determines the horn angle. A typical servo motor expects to be updated every 20. Servo Pulse Width Chart.
From community.robotshop.com
What is a Servo? Servo pulse requirement specs Robot Parts Servo Pulse Width Chart For example, if you have a servo with 180° turn, then 90° is the center position. I have come to the understanding that the position of a servo motor horn can be chosen using pulse width modulation (pwm) at. A pulse width of 1500. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to. Servo Pulse Width Chart.
From ucl-microbit-robotics.readthedocs.io
Servo Motors — UCL Microbit Robotics 1.0 documentation Servo Pulse Width Chart The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. The rev robotics expansion hub outputs an extended rc servo pulse that ranges from 500μs to 2500μs. Servos are controlled by pulse width, the pulse width determines the horn angle. “duty cycle” is the width of positive pulse (square. Servo Pulse Width Chart.
From coeleveld.com
Arduino + Servo (or ESC) Servo Pulse Width Chart A pulse width of 1500. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo responds to pulse widths in the range 1000 to 2000 µs. The program executes properly on a button press and steps through the desired sequence, but the pulse width values that are. Servos are. Servo Pulse Width Chart.
From softwareparticles.com
Learn How a Servo Motor Works and How to Control it Using Arduino Servo Pulse Width Chart Servos are controlled by pulse width, the pulse width determines the horn angle. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. With a 1.5 ms pulse,. A pulse width of 1500. A typical servo responds to pulse widths in the range 1000 to 2000 µs. The program executes properly on. Servo Pulse Width Chart.