Extrinsic Calibration Image . the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of.
from www.mdpi.com
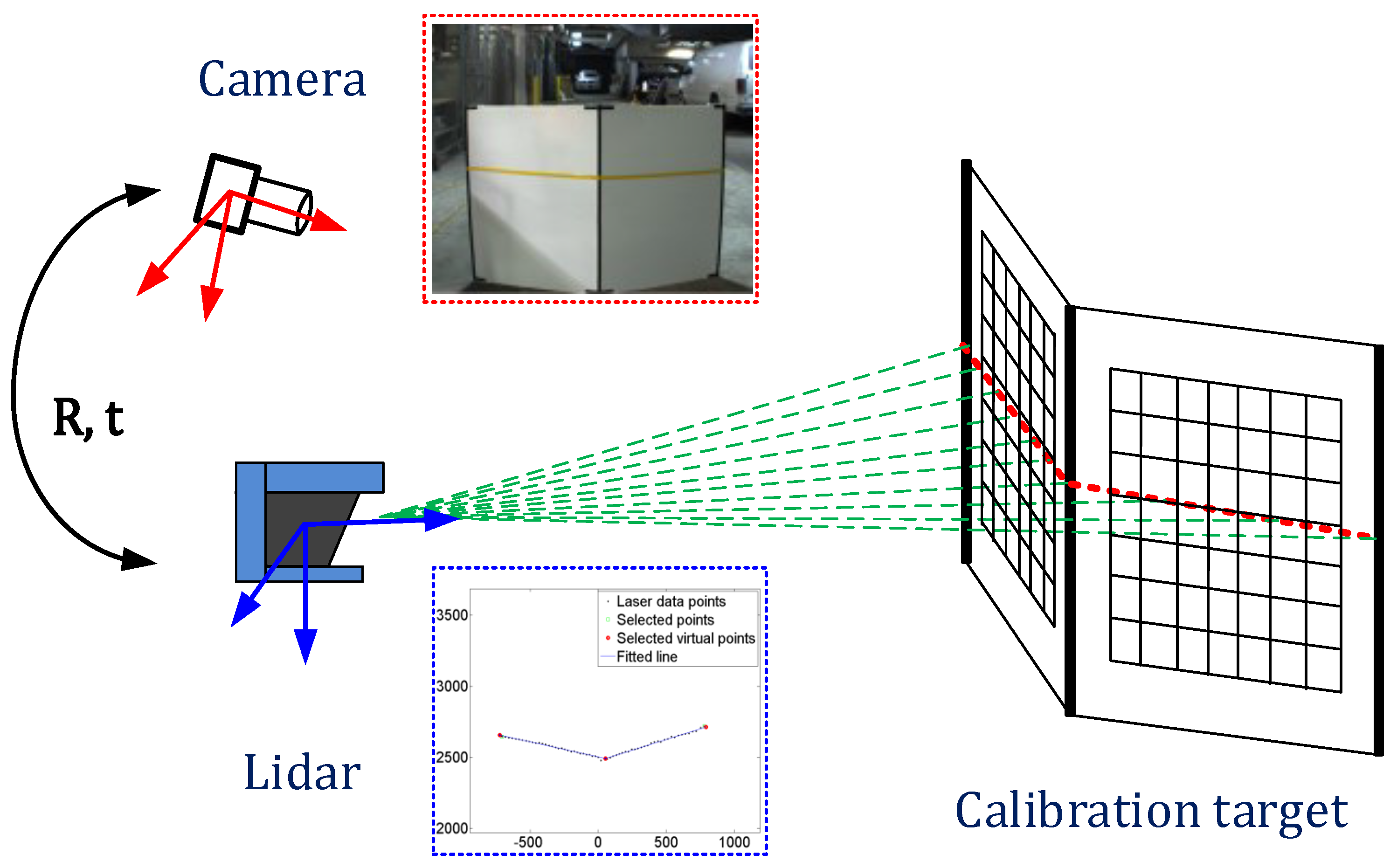
the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship.
Sensors Free FullText Indirect CorrespondenceBased Robust
Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. The extrinsic parameters represent the location of. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the.
From events.infovaya.com
Infovaya • Presentation Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. The extrinsic parameters represent the location of. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the.. Extrinsic Calibration Image.
From www.youtube.com
Intrinsic and Extrinsic Matrices Camera Calibration YouTube Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process. Extrinsic Calibration Image.
From www.anagram.at
Calibration Anagram Engineering Extrinsic Calibration Image The extrinsic parameters represent the location of. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation. Extrinsic Calibration Image.
From www.researchgate.net
Robot extrinsic calibration precision test setup and results. * denotes Extrinsic Calibration Image The extrinsic parameters represent the location of. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters.. Extrinsic Calibration Image.
From mapir.isa.uma.es
Extrinsic Sensor Calibration Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. The extrinsic parameters represent the location of. in this guide, we will explore the process of calibrating a camera using. Extrinsic Calibration Image.
From velog.io
Extrinsic calibration Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. in this guide, we will explore. Extrinsic Calibration Image.
From velog.io
Extrinsic calibration Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic calibration of a lidar sensor and camera estimates a. Extrinsic Calibration Image.
From github.com
How to calibrate the extrinsic parameters between two Lidars ? · Issue Extrinsic Calibration Image The extrinsic parameters represent the location of. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the extrinsic parameters define. Extrinsic Calibration Image.
From www.johnloomis.org
Extrinsic Calibration Data Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) Fast Extrinsic Calibration for Multiple Inertial Measurement Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic parameters. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) Extrinsic Calibration of Multiple RGBD Cameras From Line Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. in this guide, we will explore. Extrinsic Calibration Image.
From www.researchgate.net
Extrinsic calibration process. Download Scientific Diagram Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the extrinsic parameters define the camera pose (position and orientation) while. Extrinsic Calibration Image.
From deepai.org
Extrinsic Camera Calibration with Semantic Segmentation DeepAI Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. The extrinsic parameters represent the location of.. Extrinsic Calibration Image.
From mphy0026.readthedocs.io
5.5. Intrinsic camera parameters calibration — MPHY0026 documentation Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. The extrinsic parameters represent the location of. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3. Extrinsic Calibration Image.
From www.tri.global
Robust SelfSupervised Extrinsic SelfCalibration Toyota Research Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process. Extrinsic Calibration Image.
From www.mathworks.com
Lidar and Camera Calibration MATLAB & Simulink Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of.. Extrinsic Calibration Image.
From deepai.org
Extrinsic calibration for highly accurate trajectories reconstruction Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of.. Extrinsic Calibration Image.
From www.scielo.org.co
Software Tool for the Extrinsic Calibration of Infrared and RGBD Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) LineBased Extrinsic Calibration of Range and Image Sensors Extrinsic Calibration Image the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic parameters. Extrinsic Calibration Image.
From velog.io
[Perception Application] 5. Extrinsic Calibration Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix. Extrinsic Calibration Image.
From www.mdpi.com
Sensors Free FullText Extrinsic Calibration of Multiple 3D LiDAR Extrinsic Calibration Image The extrinsic parameters represent the location of. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic parameters define the camera pose (position and orientation). Extrinsic Calibration Image.
From deep.ai
Extrinsic Calibration and Verification of Multiple Nonoverlapping Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. The extrinsic parameters represent the location of. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the.. Extrinsic Calibration Image.
From www.mdpi.com
Sensors Free FullText Indirect CorrespondenceBased Robust Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. The extrinsic parameters represent the location of. the extrinsic calibration of. Extrinsic Calibration Image.
From daniilidis-group.github.io
Extrinsic Calibration PennCOSYVIO Data Set Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. The extrinsic parameters represent the location of. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the calibration algorithm calculates. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) Extrinsic Calibration of a Small FoV LiDAR and a Camera Extrinsic Calibration Image the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. The extrinsic parameters represent the location of. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters.. Extrinsic Calibration Image.
From deepai.org
Extrinsic Calibration of LiDAR, IMU and Camera DeepAI Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship.. Extrinsic Calibration Image.
From velog.io
Extrinsic calibration Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. in this guide, we will explore the process of calibrating a camera using a charuco board and. Extrinsic Calibration Image.
From github.com
extrinsiccalibration · GitHub Topics · GitHub Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) Extrinsic calibration of a camera and laser range finder Extrinsic Calibration Image the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. The extrinsic parameters represent the location of.. Extrinsic Calibration Image.
From www.researchgate.net
(PDF) Targetless Extrinsic Calibration of Camera and Lowresolution 3D Extrinsic Calibration Image The extrinsic parameters represent the location of. the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. the extrinsic parameters define the camera pose (position and orientation). Extrinsic Calibration Image.
From www.researchgate.net
Preliminary calibration principle of extrinsic parameters. Download Extrinsic Calibration Image in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix ,. Extrinsic Calibration Image.
From support.intelrealsense.com
Extrinsic Camera Calibration Intel RealSense Help Center Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. The extrinsic parameters represent the location of. the calibration algorithm calculates the camera matrix using the extrinsic. Extrinsic Calibration Image.
From furonteer.com
Extrinsic Parameter Calibration FURONTEER Extrinsic Calibration Image the calibration algorithm calculates the camera matrix using the extrinsic and intrinsic parameters. the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining. Extrinsic Calibration Image.
From velog.io
Extrinsic calibration Extrinsic Calibration Image the extrinsic calibration of a lidar sensor and camera estimates a rigid transformation between them that establishes a geometric relationship. The extrinsic parameters represent the location of. the extrinsic parameters define the camera pose (position and orientation) while the intrinsic parameters specify the camera. the goal of the calibration process is to find the 3×3 matrix ,. Extrinsic Calibration Image.
From github.com
GitHub rosnaoqi/extrinsic_calibration Extrinsic calibration for the Extrinsic Calibration Image the goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the. The extrinsic parameters represent the location of. in this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and. the extrinsic calibration of. Extrinsic Calibration Image.