Yaw Pitch Roll Matlab . Rotation by x axis, yaw: Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. I am using the following formulas at the moment, but i. Consider two 3d rotation matrices. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by y axis, roll: This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Direction vector v(x,y,z) pitch = asin(v.y /.
from www.smlease.com
I am using the following formulas at the moment, but i. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Rotation by x axis, yaw: The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by y axis, roll: Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Consider two 3d rotation matrices. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Direction vector v(x,y,z) pitch = asin(v.y /. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q.
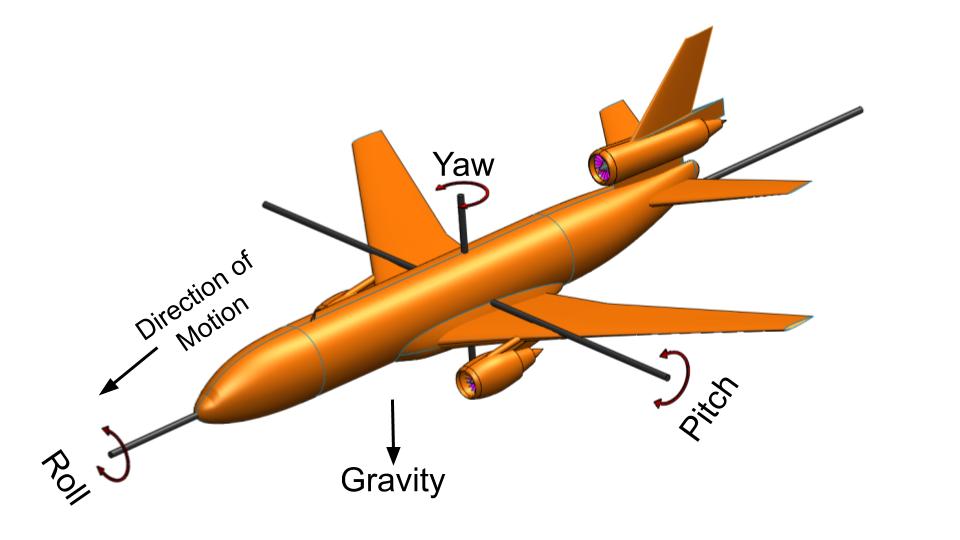
What is the difference between Roll Pitch Yaw Aircraft Motions
Yaw Pitch Roll Matlab This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Rotation by x axis, yaw: Consider two 3d rotation matrices. Direction vector v(x,y,z) pitch = asin(v.y /. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by y axis, roll: I am using the following formulas at the moment, but i.
From www.researchgate.net
yaw, pitch & roll angles vs time Download Scientific Diagram Yaw Pitch Roll Matlab Rotation by x axis, yaw: Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Consider a body frame obtained by a consecutive rotation of. Yaw Pitch Roll Matlab.
From space.stackexchange.com
artificial satellite Determine Yaw, Pitch, Roll from two vectors Yaw Pitch Roll Matlab Rotation by x axis, yaw: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Consider two 3d rotation matrices. I am using the following formulas at the. Yaw Pitch Roll Matlab.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Matlab This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. I am using the following formulas at the moment, but i. Consider two 3d rotation matrices. Direction vector v(x,y,z) pitch =. Yaw Pitch Roll Matlab.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Matlab Rotation by y axis, roll: I am using the following formulas at the moment, but i. Rotation by x axis, yaw: How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Plotorientation(oplotter,roll,pitch,yaw). Yaw Pitch Roll Matlab.
From www.youtube.com
RollPitchYaw Angles in Robotics Fundamentals of Robotics Lesson Yaw Pitch Roll Matlab The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. I am using the following formulas at the moment, but i. Rotation by y axis, roll: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in. Yaw Pitch Roll Matlab.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Matlab Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by x axis, yaw: I am using the. Yaw Pitch Roll Matlab.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Yaw Pitch Roll Matlab Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Rotation by y axis, roll: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Direction vector v(x,y,z) pitch = asin(v.y /. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m. Yaw Pitch Roll Matlab.
From blog.sciencenet.cn
科学网—[转载]pitch\yaw\roll释义 董思学的博文 Yaw Pitch Roll Matlab Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Rotation by y. Yaw Pitch Roll Matlab.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Yaw Pitch Roll Matlab Rotation by y axis, roll: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Rotation by x axis, yaw: I am using the following formulas at the moment, but i. How can i calculate the roll, pitch and yaw angles associated with. Yaw Pitch Roll Matlab.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll Matlab This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by y axis, roll: The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees. Yaw Pitch Roll Matlab.
From www.researchgate.net
Simulated spatial path of the quadrotor, and plots of roll, pitch and Yaw Pitch Roll Matlab Direction vector v(x,y,z) pitch = asin(v.y /. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider two 3d rotation. Yaw Pitch Roll Matlab.
From www.researchgate.net
1 Roll, yaw and pitch motion of a moving vessel. The same motions apply Yaw Pitch Roll Matlab This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by y axis, roll: Direction vector v(x,y,z) pitch = asin(v.y /. Consider two 3d rotation matrices. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider a body frame. Yaw Pitch Roll Matlab.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Matlab Consider two 3d rotation matrices. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Rotation by x axis, yaw: Direction vector v(x,y,z) pitch = asin(v.y /. Rotation by y axis, roll: Consider a body frame obtained by a. Yaw Pitch Roll Matlab.
From www.numerade.com
SOLVED Text Need Matlab code for yellow highlighted part (b) Rotation Yaw Pitch Roll Matlab Consider two 3d rotation matrices. Rotation by y axis, roll: Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Direction vector v(x,y,z) pitch =. Yaw Pitch Roll Matlab.
From triped-robot.github.io
About the Matlab Simulation TriPed Project Yaw Pitch Roll Matlab Consider two 3d rotation matrices. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and. Yaw Pitch Roll Matlab.
From homveloper.github.io
UE4 Pitch Yaw Roll 집이 좋은 개발자의 게임 개발 Yaw Pitch Roll Matlab The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Direction vector v(x,y,z) pitch = asin(v.y /. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in. Yaw Pitch Roll Matlab.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Yaw Pitch Roll Matlab Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Consider two 3d rotation matrices. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by y axis, roll: The first matrix, r1 applies yaw,. Yaw Pitch Roll Matlab.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Matlab Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Consider two 3d rotation matrices. Rotation by y axis, roll: Direction vector v(x,y,z) pitch = asin(v.y /. The first matrix, r1 applies yaw, pitch and roll to the world frame, o. Yaw Pitch Roll Matlab.
From velog.io
Rotation Yaw, Pitch, Roll Yaw Pitch Roll Matlab Rotation by y axis, roll: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. I am using the following formulas at the moment, but i. Rotation by x axis, yaw: This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3,. Yaw Pitch Roll Matlab.
From www.freepik.es
Roll, pitch, yaw tres ángulos de rotación correspondientes a los Yaw Pitch Roll Matlab Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider two 3d rotation matrices. Direction vector v(x,y,z) pitch = asin(v.y /. Consider a body frame obtained by a consecutive rotation of 20 degrees. Yaw Pitch Roll Matlab.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Matlab I am using the following formulas at the moment, but i. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by y axis, roll:. Yaw Pitch Roll Matlab.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Yaw Pitch Roll Matlab This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Rotation by x axis, yaw: Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the. Yaw Pitch Roll Matlab.
From www.researchgate.net
Orientation of the head in terms of pitch, roll, and yaw movements Yaw Pitch Roll Matlab I am using the following formulas at the moment, but i. Rotation by y axis, roll: The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in. Yaw Pitch Roll Matlab.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Yaw Pitch Roll Matlab I am using the following formulas at the moment, but i. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10. Yaw Pitch Roll Matlab.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Matlab How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. I am using the following. Yaw Pitch Roll Matlab.
From www.mathworks.com
Estimate extrinsic monocular camera parameters using calibration Yaw Pitch Roll Matlab The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by y axis, roll: How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Consider a. Yaw Pitch Roll Matlab.
From www.alamy.com
Roll Pitch Yaw Stock Photo Alamy Yaw Pitch Roll Matlab The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in. Yaw Pitch Roll Matlab.
From www.youtube.com
Roll, pitch & yaw control Flight Mechanics GATE Aerospace YouTube Yaw Pitch Roll Matlab The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by x axis, yaw: I. Yaw Pitch Roll Matlab.
From www.researchgate.net
Roll, pitch, and yaw following. Download Scientific Diagram Yaw Pitch Roll Matlab Consider two 3d rotation matrices. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Rotation by x axis, yaw: Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of m objects to show for the orientation plotter, oplotter. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. How can i calculate. Yaw Pitch Roll Matlab.
From www.droneybee.com
ROLL, PITCH, YAW Yaw Pitch Roll Matlab Rotation by y axis, roll: Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Rotation by x axis, yaw: Direction vector v(x,y,z) pitch = asin(v.y /. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. How can i calculate the roll, pitch and yaw angles associated. Yaw Pitch Roll Matlab.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll Matlab Consider two 3d rotation matrices. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Rotation by x axis, yaw: Direction vector v(x,y,z) pitch = asin(v.y /. Plotorientation(oplotter,roll,pitch,yaw) specifies the orientations of. Yaw Pitch Roll Matlab.
From manuallistcantabank.z21.web.core.windows.net
Pitch Roll Yaw Diagram Yaw Pitch Roll Matlab Rotation by x axis, yaw: The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. Estimate the rate of change in the euler angles using inertial navigation system mechanization equations. Plotorientation(oplotter,roll,pitch,yaw). Yaw Pitch Roll Matlab.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Matlab Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. The first matrix, r1 applies yaw, pitch and roll to the world frame, o with axes x, y, z, to an intermediate. Estimate the rate of change in the euler angles using inertial. Yaw Pitch Roll Matlab.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter [7]. Download Yaw Pitch Roll Matlab Consider two 3d rotation matrices. Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. Rotation by y axis, roll: How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The first matrix, r1 applies yaw, pitch. Yaw Pitch Roll Matlab.
From www.youtube.com
Cuadricóptero, control PID aplicado a los ángulos (yaw, pitch, roll Yaw Pitch Roll Matlab Rotation by y axis, roll: Consider a body frame obtained by a consecutive rotation of 20 degrees in yaw, 5 degrees in pitch, and 10 degrees in roll from the parent ned. This matlab function calculates the set of rotation angles, rotationang1, rotationang2, rotationang3, for a given quaternion, q. How can i calculate the roll, pitch and yaw angles associated. Yaw Pitch Roll Matlab.