Yaw Pitch Roll Robotics . We specify the order as: Find the equations for differential. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Yaw first, then pitch, then roll. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to represent the position and rotation of a robot using 2d coordinate systems. See illustrations of yaw, pitch, and roll rotations and their effects.
from www.youtube.com
Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Yaw first, then pitch, then roll. See illustrations of yaw, pitch, and roll rotations and their effects. Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. We specify the order as:
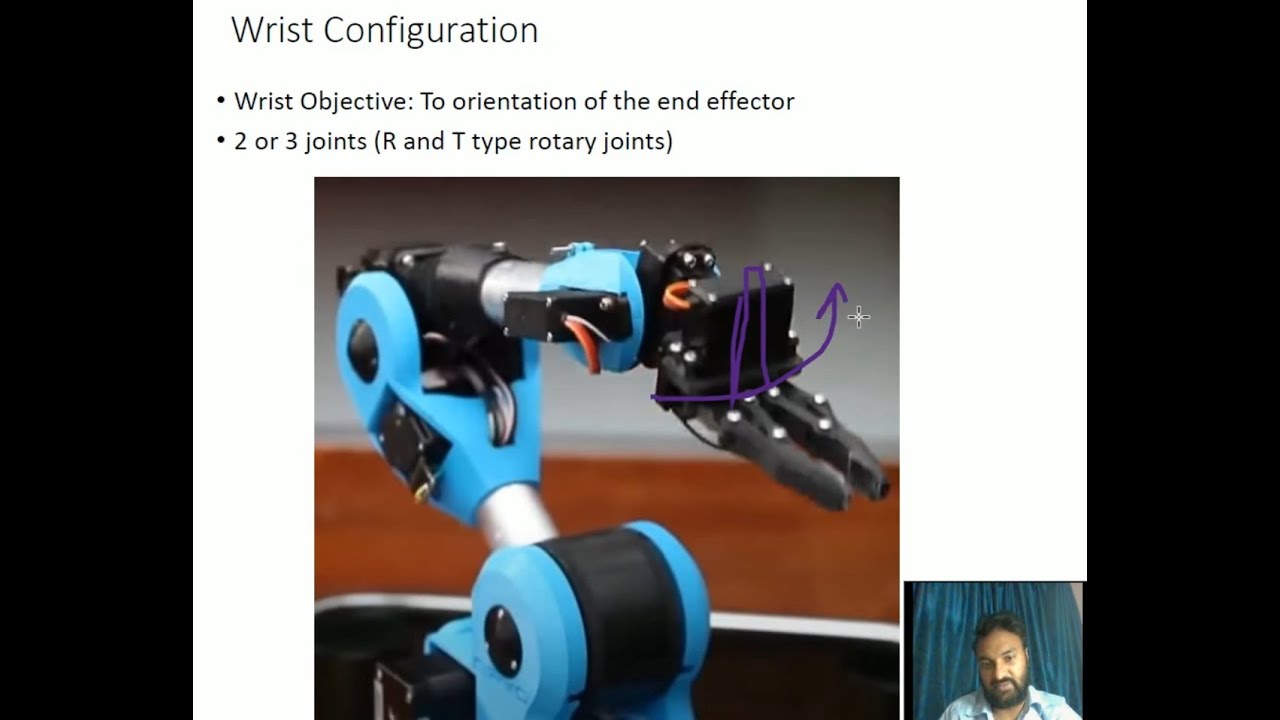
Industrial Robotics Part 3 Types Of Robots Wrist Configuration Pitch
Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Find the equations for differential. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to represent the position and rotation of a robot using 2d coordinate systems. We specify the order as: Yaw first, then pitch, then roll. See illustrations of yaw, pitch, and roll rotations and their effects.
From joiqdydbe.blob.core.windows.net
Yaw Pitch Roll Rocket at Josefa Jackson blog Yaw Pitch Roll Robotics We specify the order as: Find the equations for differential. Yaw first, then pitch, then roll. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to define. Yaw Pitch Roll Robotics.
From www.mecharithm.com
Other Explicit Representation for the Orientation in Robotics Roll Yaw Pitch Roll Robotics Find the equations for differential. Yaw first, then pitch, then roll. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. We specify the order as: These. Yaw Pitch Roll Robotics.
From www.studocu.com
Robotics lecture notes ws 2022 52 3.6 RollPitchYaw Transformation Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to represent the position and rotation of a robot using 2d. Yaw Pitch Roll Robotics.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations and their effects. We specify the order as: Yaw first, then pitch, then roll. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Find the equations for differential.. Yaw Pitch Roll Robotics.
From www.youtube.com
Pitch Yaw Roll Explained YouTube Yaw Pitch Roll Robotics Learn how to represent the position and rotation of a robot using 2d coordinate systems. Find the equations for differential. We specify the order as: Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to transform vectors and rotations between. Yaw Pitch Roll Robotics.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations and their effects. Yaw first, then pitch, then roll. Find the equations for differential. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to transform vectors and rotations between. Yaw Pitch Roll Robotics.
From www.designworldonline.com
Motorized yawpitchroll stages from OES Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown. Yaw Pitch Roll Robotics.
From droidbot07.blogspot.com
Head pitch, roll and yaw mechanism Yaw Pitch Roll Robotics Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. See illustrations of yaw, pitch, and roll rotations and their effects. We specify the order as: These rotations define the roll, pitch and. Yaw Pitch Roll Robotics.
From www.youtube.com
Industrial Robotics Part 3 Types Of Robots Wrist Configuration Pitch Yaw Pitch Roll Robotics See illustrations of yaw, pitch, and roll rotations and their effects. We specify the order as: These rotations define the roll, pitch and yaw angles as shown in figure 3. Find the equations for differential. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to transform vectors and rotations between inertial. Yaw Pitch Roll Robotics.
From www.machinedesign.com
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. These rotations define the roll, pitch and yaw angles as shown in figure 3. We specify the order as: Find the equations for differential. Yaw first, then pitch, then roll. Learn how to represent the position and rotation of a robot using 2d. Yaw Pitch Roll Robotics.
From www.youtube.com
Yaw, Pitch and Roll What's it? YouTube Yaw Pitch Roll Robotics Yaw first, then pitch, then roll. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to transform vectors and rotations between inertial. Yaw Pitch Roll Robotics.
From www.slideserve.com
PPT Robot Kinematics II PowerPoint Presentation ID579636 Yaw Pitch Roll Robotics We specify the order as: These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. See illustrations of yaw, pitch, and roll rotations and their effects. Find the equations for differential. Learn how to define and counteract roll, pitch,. Yaw Pitch Roll Robotics.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Robotics See illustrations of yaw, pitch, and roll rotations and their effects. Yaw first, then pitch, then roll. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Find the equations for differential. Learn how to represent the position and rotation. Yaw Pitch Roll Robotics.
From howthingsfly.si.edu
Roll, Pitch, and Yaw How Things Fly Yaw Pitch Roll Robotics Yaw first, then pitch, then roll. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to represent the position and rotation of a robot using 2d coordinate systems. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to transform vectors and rotations. Yaw Pitch Roll Robotics.
From www.youtube.com
UE5 Blueprints Tutorial 0123 Roll, Pitch, Yaw (R, P, Y)ロール・ピッチ・ヨー Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Yaw first, then pitch, then roll. See illustrations of yaw, pitch, and roll rotations and their effects. We specify the order as: Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to represent the. Yaw Pitch Roll Robotics.
From www.pinterest.com
Different Motions of flight in Quadcopter, Yaw, Roll, Pitch Motion Yaw Pitch Roll Robotics See illustrations of yaw, pitch, and roll rotations and their effects. Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown in figure. Yaw Pitch Roll Robotics.
From www.youtube.com
Lecture 15 Robotics ROLLPITCHYAW ANGLES IN ROBOTICS. YouTube Yaw Pitch Roll Robotics We specify the order as: Learn how to represent the position and rotation of a robot using 2d coordinate systems. Find the equations for differential. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations and their effects. Yaw first, then pitch, then roll. These rotations. Yaw Pitch Roll Robotics.
From www.researchgate.net
9 Gimbals in a yaw, pitch, roll sequence 3 Download Scientific Diagram Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. We specify the order as: Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. See illustrations of yaw, pitch, and roll rotations and their effects. Yaw first, then pitch, then roll. These rotations. Yaw Pitch Roll Robotics.
From ros-robotics.blogspot.com
Robot Operating System (ROS) Getting roll, pitch and yaw from Yaw Pitch Roll Robotics Yaw first, then pitch, then roll. These rotations define the roll, pitch and yaw angles as shown in figure 3. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to represent the position and rotation of a robot using 2d. Yaw Pitch Roll Robotics.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Robotics Yaw first, then pitch, then roll. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to represent the position and rotation of a robot using 2d coordinate systems. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. These rotations define the roll, pitch. Yaw Pitch Roll Robotics.
From www.youtube.com
Lecture 2 2.3 Roll, Pitch, Yaw angles (Robotics UTEC 20181) YouTube Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. See illustrations of yaw, pitch, and roll rotations and their effects. Find the equations for differential. These rotations define the roll, pitch and yaw angles as shown in figure 3. Yaw first, then pitch, then roll. We specify the order as: Learn how. Yaw Pitch Roll Robotics.
From journals.sagepub.com
Yaw control torque generation for a hovering robotic hummingbird Ali Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Yaw first, then pitch, then roll. These rotations define the roll, pitch. Yaw Pitch Roll Robotics.
From quienquedaconquien.com
Amazon Jungle curva Test di Derbeville roll pitch yaw robotics club Yaw Pitch Roll Robotics These rotations define the roll, pitch and yaw angles as shown in figure 3. Find the equations for differential. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles. Yaw Pitch Roll Robotics.
From siafstephenhoward.blogspot.com
3d roll pitch yaw Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. We specify the order as: These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to represent the position and rotation. Yaw Pitch Roll Robotics.
From community.robotshop.com
Basics How Do I Choose a Robotic A Community Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. We specify the order as: See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. These rotations define the roll, pitch and yaw angles as shown in figure. Yaw Pitch Roll Robotics.
From www.simracingstudio.com
Motion 101 Roll, Pitch, Yaw, Sway, Surge, Heave and Traction Loss Yaw Pitch Roll Robotics Yaw first, then pitch, then roll. These rotations define the roll, pitch and yaw angles as shown in figure 3. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to represent the position and rotation of a robot using. Yaw Pitch Roll Robotics.
From www.youtube.com
Roll, pitch, and yaw animation robotics gripper YouTube Yaw Pitch Roll Robotics We specify the order as: Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Yaw first, then pitch, then roll. Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to transform vectors and rotations between inertial and body frames using. Yaw Pitch Roll Robotics.
From wiki.dfrobot.com
How_to_Use_a_ThreeAxis_Accelerometer_for_Tilt_SensingDFRobot Yaw Pitch Roll Robotics See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Yaw first, then pitch, then roll. Find the equations for differential. These rotations define the roll, pitch and yaw angles as shown in figure 3. We specify the order as: Learn how to transform. Yaw Pitch Roll Robotics.
From www.researchgate.net
Attitude control mechanism of roll, pitch, and yaw in the NUS Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. We specify the order as: Learn how to represent the position and rotation of a robot using 2d coordinate systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to transform vectors and rotations between inertial and. Yaw Pitch Roll Robotics.
From www.pinterest.com
Yaw Roll Pitch Motions in Aircraft Mechanical design, Motion, Free space Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Find the equations for differential. Learn how to represent the position and rotation of a robot using 2d coordinate systems. We specify the order as: See illustrations. Yaw Pitch Roll Robotics.
From www.roboticsunveiled.com
Robotics Part 11 Representations of Orientation Euler Angles ZYX Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. Yaw first, then pitch, then roll. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Find the equations for differential. We specify the. Yaw Pitch Roll Robotics.
From www.youtube.com
Drone Flight Physics (in under 2 minutes) Yaw, Pitch & Roll (and Yaw Pitch Roll Robotics We specify the order as: Yaw first, then pitch, then roll. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Find the equations for differential. Learn how to transform vectors and rotations between inertial and body frames using euler. Yaw Pitch Roll Robotics.
From www.youtube.com
RollPitchYaw Angles in Robotics Fundamentals of Robotics Lesson Yaw Pitch Roll Robotics Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. See illustrations of yaw, pitch, and roll rotations and their effects. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Find the. Yaw Pitch Roll Robotics.
From www.youtube.com
Roll, pitch & yaw control Flight Mechanics GATE Aerospace YouTube Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. These rotations define the roll, pitch and yaw angles as shown in figure 3. Learn how to represent the position and rotation of a robot using 2d coordinate systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles. Yaw Pitch Roll Robotics.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter. Download Scientific Yaw Pitch Roll Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn how to transform vectors and rotations between inertial and body frames using euler angles and quaternions. These rotations define the roll, pitch and yaw angles as shown in figure 3. Yaw first, then pitch, then roll. Find the equations for differential. See illustrations. Yaw Pitch Roll Robotics.