Yaw Pitch Roll Between Two Vectors . // find the vector in the xy plane 90 degrees to the right of our bearing. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Direction vector v(x,y,z) pitch = asin(v.y /. Roll pitch yaw (rpy) convention. Rotation by x axis, yaw: This is the rotation matrix that rotates your reference. Rotation by y axis, roll: Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. To calculate the yaw you calculate the tangent of the two.
from www.alamy.com
Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Direction vector v(x,y,z) pitch = asin(v.y /. Roll pitch yaw (rpy) convention. // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This is the rotation matrix that rotates your reference. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two.
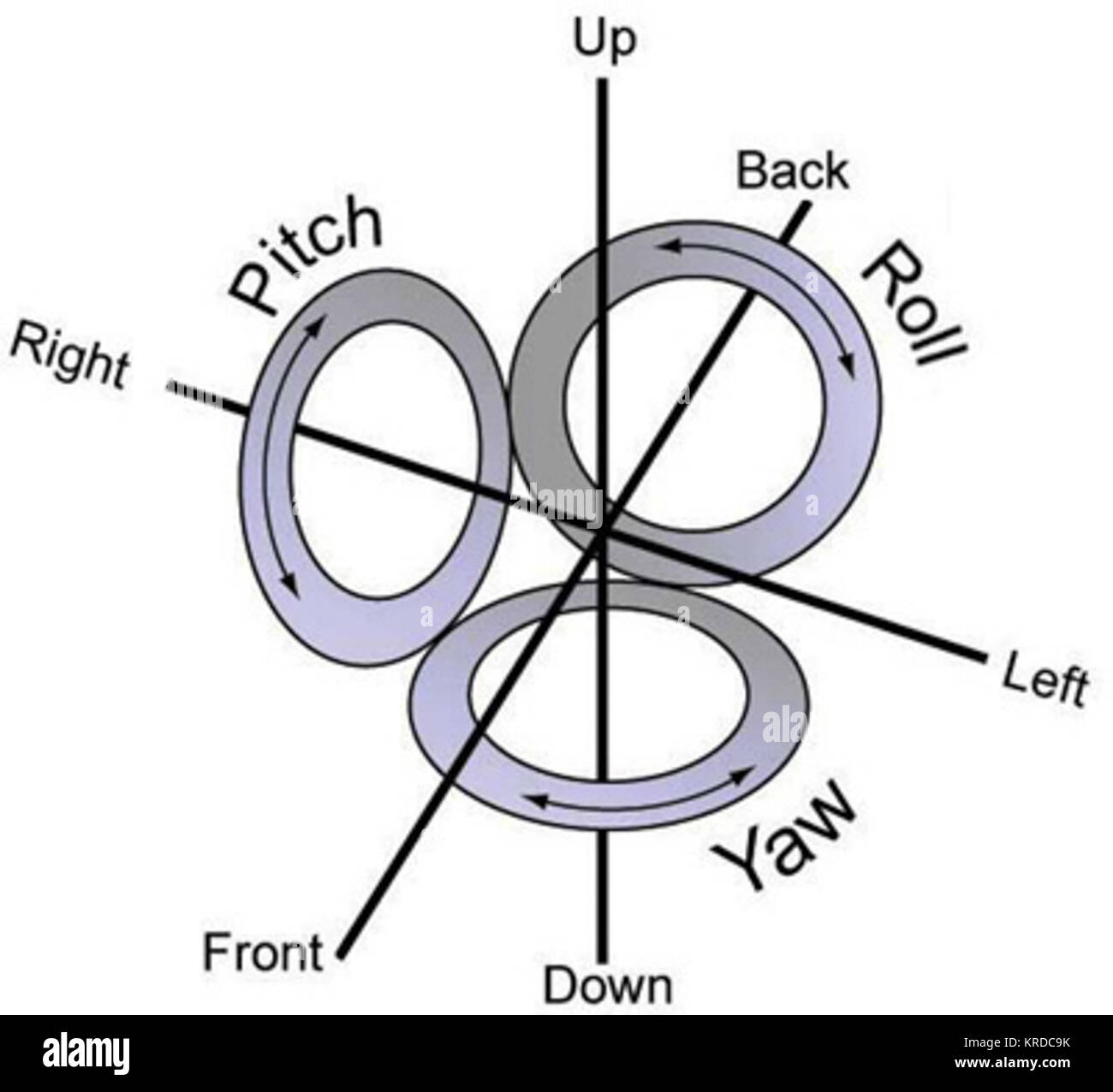
Roll pitch and yaw the plane of motion of each semicircular canal
Yaw Pitch Roll Between Two Vectors Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Rotation by x axis, yaw: I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Direction vector v(x,y,z) pitch = asin(v.y /. This is the rotation matrix that rotates your reference. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two. Roll pitch yaw (rpy) convention. // find the vector in the xy plane 90 degrees to the right of our bearing. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0).
From www.shutterstock.com
Yawing 3 685 images, photos et images vectorielles de stock Yaw Pitch Roll Between Two Vectors This is the rotation matrix that rotates your reference. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two. Roll pitch yaw (rpy) convention. Given s as the vector which points from the satellite to the point on earth and. Yaw Pitch Roll Between Two Vectors.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Yaw Pitch Roll Between Two Vectors Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This is the rotation matrix that rotates your reference. // find the vector in the xy plane 90 degrees to the right of our bearing. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Direction. Yaw Pitch Roll Between Two Vectors.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Between Two Vectors Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Rotation by y axis, roll: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Rotation by. Yaw Pitch Roll Between Two Vectors.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. This is the rotation matrix that rotates your reference. Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two. Gather the three vectors as column. Yaw Pitch Roll Between Two Vectors.
From highsierrapilots.club
rollpitchyawdiagram High Sierra Pilots Yaw Pitch Roll Between Two Vectors Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v,. Yaw Pitch Roll Between Two Vectors.
From mungfali.com
Roll Pitch Yaw Symbols Yaw Pitch Roll Between Two Vectors Rotation by y axis, roll: Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. To calculate the yaw you calculate the tangent of the two. // find the vector in the xy plane 90 degrees to. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Illustration of ship motion, showing roll, pitch, and yaw, the three Yaw Pitch Roll Between Two Vectors I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Roll pitch yaw (rpy) convention. Gather the three vectors as column vectors into the matrix $u. Yaw Pitch Roll Between Two Vectors.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Direction vector v(x,y,z) pitch = asin(v.y /. // find the vector in the xy plane 90 degrees to the right of our bearing. This is the rotation matrix that rotates your. Yaw Pitch Roll Between Two Vectors.
From aviatechchannel.com
Understanding Aircraft Roll, Pitch, Yaw Axes Yaw Pitch Roll Between Two Vectors Rotation by x axis, yaw: I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. This is the rotation matrix that rotates your reference. // find the vector in the xy plane 90 degrees to the right of our bearing. To calculate the yaw you calculate. Yaw Pitch Roll Between Two Vectors.
From sadhikamaja.blogspot.com
Yaw Pitch Roll SadhikaMaja Yaw Pitch Roll Between Two Vectors This is the rotation matrix that rotates your reference. Rotation by x axis, yaw: Roll pitch yaw (rpy) convention. // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Given s as the vector. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Effect of pitch, yaw and roll on the gimbal's movement. Download Yaw Pitch Roll Between Two Vectors Rotation by x axis, yaw: Direction vector v(x,y,z) pitch = asin(v.y /. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation by y axis, roll: Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. // find the vector in. Yaw Pitch Roll Between Two Vectors.
From joiqdydbe.blob.core.windows.net
Yaw Pitch Roll Rocket at Josefa Jackson blog Yaw Pitch Roll Between Two Vectors // find the vector in the xy plane 90 degrees to the right of our bearing. Direction vector v(x,y,z) pitch = asin(v.y /. This is the rotation matrix that rotates your reference. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the. Yaw Pitch Roll Between Two Vectors.
From avopix.com
Yaw, pitch and roll in an aircraft Royalty Free Stock Vector Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two. Rotation by x axis, yaw: Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). This. Yaw Pitch Roll Between Two Vectors.
From www.machinedesign.com
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design Yaw Pitch Roll Between Two Vectors Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Roll pitch yaw (rpy) convention. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Direction vector. Yaw Pitch Roll Between Two Vectors.
From www.alamy.com
Roll pitch and yaw the plane of motion of each semicircular canal Yaw Pitch Roll Between Two Vectors Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. // find the vector in the xy plane 90 degrees to the right of our bearing. To calculate the yaw you calculate the tangent of the. Yaw Pitch Roll Between Two Vectors.
From www.pinterest.com
Axis rotations (pitch, yaw and roll) and translation specified by a Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Direction vector v(x,y,z) pitch = asin(v.y /. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). //. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Yaw Pitch Roll Between Two Vectors I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Direction vector v(x,y,z). Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Euler sequence (a) Yaw; (b) Pitch; and (c) Roll. Download Scientific Yaw Pitch Roll Between Two Vectors Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. I have the code below that takes. Yaw Pitch Roll Between Two Vectors.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll Between Two Vectors // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation by y axis, roll: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and. Yaw Pitch Roll Between Two Vectors.
From sites.google.com
Instrumentation The Smart Gimbal Yaw Pitch Roll Between Two Vectors Rotation by y axis, roll: I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Roll pitch yaw (rpy) convention. // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation by x axis, yaw: To calculate the yaw you. Yaw Pitch Roll Between Two Vectors.
From www.droneybee.com
ROLL, PITCH, YAW Yaw Pitch Roll Between Two Vectors I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Rotation by y axis, roll: To calculate the yaw you calculate the tangent of the two.. Yaw Pitch Roll Between Two Vectors.
From aleksandarhaber.com
Clear Graphical and Mathematical Explanation of Yaw, Pitch and Roll Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. This is the rotation matrix that rotates your reference. Given a yaw angle ϕ ϕ and a pitch angle θ θ we. Yaw Pitch Roll Between Two Vectors.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Between Two Vectors Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. Direction vector v(x,y,z) pitch = asin(v.y /. Roll pitch yaw (rpy) convention. To calculate the yaw you calculate the tangent of the two. // find the vector. Yaw Pitch Roll Between Two Vectors.
From www.freepik.com
Premium Vector Roll, pitch, yaw three rotation angles corresponding Yaw Pitch Roll Between Two Vectors Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation about x0 of angle g + rotation about y0 of. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll Between Two Vectors Rotation by x axis, yaw: Rotation by y axis, roll: Roll pitch yaw (rpy) convention. To calculate the yaw you calculate the tangent of the two. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter [7]. Download Yaw Pitch Roll Between Two Vectors Rotation by y axis, roll: Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Roll pitch yaw (rpy) convention. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). This is the. Yaw Pitch Roll Between Two Vectors.
From www.vectornav.com
Attitude representation in inertial navigation · VectorNav Yaw Pitch Roll Between Two Vectors // find the vector in the xy plane 90 degrees to the right of our bearing. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation by y axis, roll: Rotation about x0 of angle g + rotation about y0 of angle b + rotation. Yaw Pitch Roll Between Two Vectors.
From bgf2indira.blogspot.com
Sudut Roll Pitch Yaw Yaw Pitch Roll Between Two Vectors // find the vector in the xy plane 90 degrees to the right of our bearing. Roll pitch yaw (rpy) convention. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation by y axis, roll: This is the rotation matrix that rotates your reference. To. Yaw Pitch Roll Between Two Vectors.
From velog.io
Rotation Yaw, Pitch, Roll Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. To calculate the yaw you calculate the tangent of the two. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Rotation by y axis, roll: Rotation by x axis, yaw: Given s as the vector which points from the satellite. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Illustration of ship motion, showing roll, pitch, and yaw, the three Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. This is the rotation matrix that rotates your reference. Rotation by y axis, roll: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward,. Yaw Pitch Roll Between Two Vectors.
From math.stackexchange.com
geometry 3D Coordinate Rotation Using RollPitchYaw Mathematics Yaw Pitch Roll Between Two Vectors I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Gather the three vectors as column vectors into the matrix $u = \left(\hat{x}^\prime\, \hat{y}^\prime\,\hat{z}^\prime\right)$. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to. Yaw Pitch Roll Between Two Vectors.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Between Two Vectors I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Roll pitch yaw (rpy) convention. Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to. Yaw Pitch Roll Between Two Vectors.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Between Two Vectors This is the rotation matrix that rotates your reference. Rotation by y axis, roll: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. Direction vector. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Yaw Pitch Roll Between Two Vectors Roll pitch yaw (rpy) convention. // find the vector in the xy plane 90 degrees to the right of our bearing. Rotation by x axis, yaw: Given s as the vector which points from the satellite to the point on earth and assuming a yaw angle equal to 0°, it can be used the following equation to compute pitch:. To. Yaw Pitch Roll Between Two Vectors.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll Between Two Vectors Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. To calculate the yaw you calculate the tangent of the two. Direction vector v(x,y,z) pitch = asin(v.y /. Rotation by x axis, yaw: Roll pitch yaw (rpy) convention. I have the code below that takes a set of yaw, pitch,. Yaw Pitch Roll Between Two Vectors.