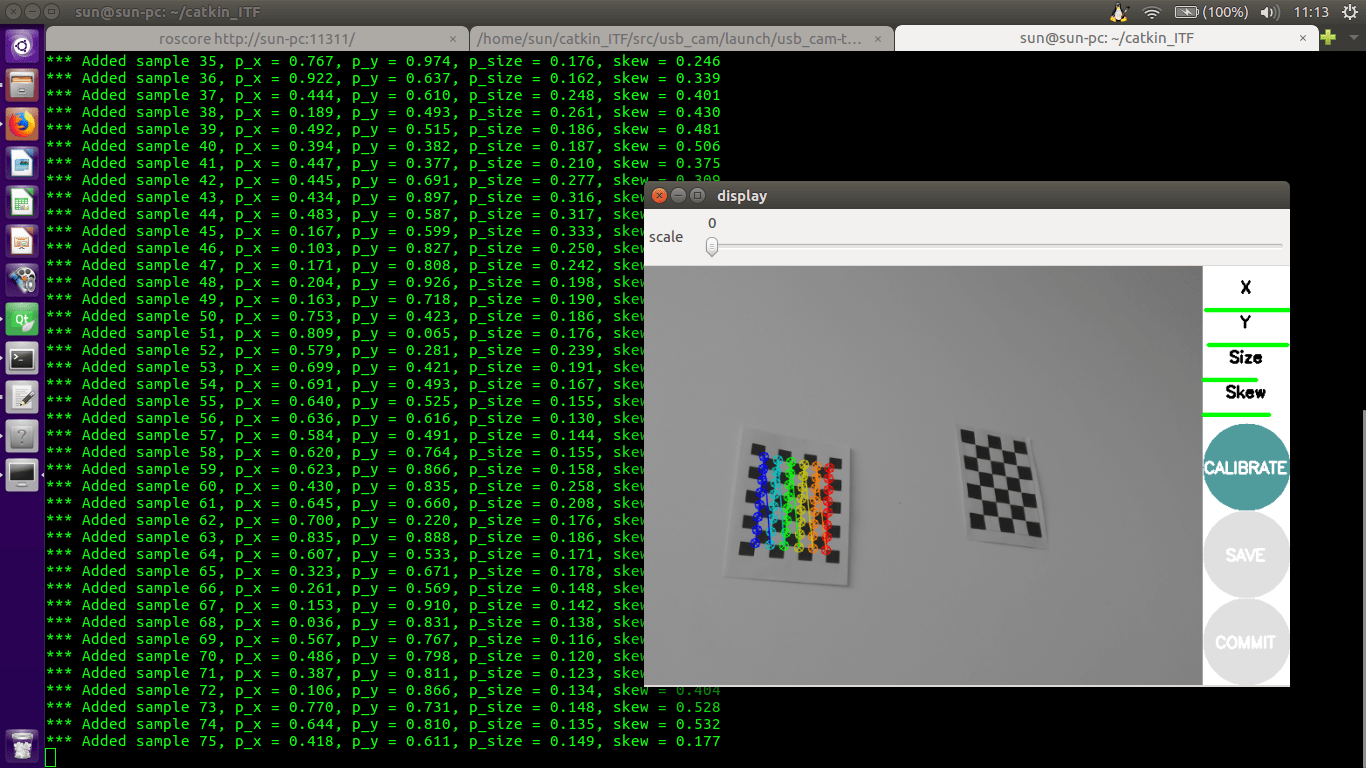
Ros Camera Calibration Yaml File . Create the calibration files for each camera; Calibrate all cameras and find a way to check the quality of the calibration files; Originally posted by mohito on ros. These are mainly used internally by camera drivers and. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? There are tutorials on how to run the calibration tool for monocular and stereo cameras. To run the cameracalibrator node for a monocular camera. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter.
from blog.csdn.net
How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? These are mainly used internally by camera drivers and. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera; Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. Calibrate all cameras and find a way to check the quality of the calibration files; To run the cameracalibrator node for a monocular camera. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target.
ROS下单目相机标定过程_camera calibration file did not specify distortionCSDN博客
Ros Camera Calibration Yaml File Originally posted by mohito on ros. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. To run the cameracalibrator node for a monocular camera. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. These are mainly used internally by camera drivers and. Create the calibration files for each camera; Originally posted by mohito on ros. Calibrate all cameras and find a way to check the quality of the calibration files; There are tutorials on how to run the calibration tool for monocular and stereo cameras. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw?
From emanual.robotis.com
TurtleBot3 Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera; To run the cameracalibrator node for a monocular camera. How can i publish cam_info messages. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS camera_calibration与Kalibr标定相机教程_kalibr标定结果参数intrinsicsfx fy cx cy Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. These are mainly used internally by camera drivers and. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration. Ros Camera Calibration Yaml File.
From wiki.ros.org
camera_calibration/Tutorials/MonocularCalibration ROS Wiki Ros Camera Calibration Yaml File Create the calibration files for each camera; To run the cameracalibrator node for a monocular camera. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Calibrate all cameras and find a way to check the quality of the calibration files; Camera_calibration allows easy calibration of monocular or stereo cameras using a. Ros Camera Calibration Yaml File.
From robotics.stackexchange.com
ros2 ROS2_Iron Camera calibration file (camera_info.yaml) not Ros Camera Calibration Yaml File Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Create the calibration files for each camera; Calibrate all cameras and find a way to check the quality of the calibration files; There are tutorials on how to run the calibration tool for monocular and stereo. Ros Camera Calibration Yaml File.
From wiki.ros.org
camera_calibration/Tutorials/MonocularCalibration ROS Wiki Ros Camera Calibration Yaml File How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? These are mainly used internally by camera drivers and. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. To run the cameracalibrator. Ros Camera Calibration Yaml File.
From www.youtube.com
Camera calibration using ROS tool YouTube Ros Camera Calibration Yaml File These are mainly used internally by camera drivers and. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. There are tutorials on how to run the calibration tool for monocular and stereo cameras. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. Calibrate all cameras and find a. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? These are mainly used internally by camera drivers and. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Creating a yaml file the camera calibration parser helps. Ros Camera Calibration Yaml File.
From wiki.ros.org
industrial_extrinsic_cal/Tutorials/cam_calibration ROS Wiki Ros Camera Calibration Yaml File Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Calibrate all cameras and find a way to check the quality of the calibration files; Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. These are mainly used internally by camera drivers and. To run the cameracalibrator node for. Ros Camera Calibration Yaml File.
From www.youtube.com
Lesson 7 Writing ROS Joint Trajectory Controller YAML File for Robotic Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. To run the cameracalibrator node for a monocular camera. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera;. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS下单目相机标定过程_camera calibration file did not specify distortionCSDN博客 Ros Camera Calibration Yaml File Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration. Ros Camera Calibration Yaml File.
From wiki.ros.org
visp_camera_calibration/Tutorials/CalibrationExternalCamera ROS Wiki Ros Camera Calibration Yaml File Originally posted by mohito on ros. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. There. Ros Camera Calibration Yaml File.
From index.ros.org
ROS Package lidar_camera_calibration Ros Camera Calibration Yaml File Create the calibration files for each camera; To run the cameracalibrator node for a monocular camera. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. These are mainly used internally by camera drivers and. Calibrate all cameras and find a way to check the quality of the calibration files; How can i publish cam_info messages. Ros Camera Calibration Yaml File.
From blog.csdn.net
【ROS实践入门(八)ROS使用USB视觉传感器相机】_基于ros系统开启usb相机,完成视频图像的边缘检测CSDN博客 Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Originally posted by mohito on ros. There are tutorials on how to run the calibration tool for monocular and stereo cameras. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. These are. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File There are tutorials on how to run the calibration tool for monocular and stereo cameras. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Calibrate all cameras and find a way to check the quality of the calibration files; Create the calibration files for each camera; Creating a yaml file the camera calibration parser helps. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File Create the calibration files for each camera; There are tutorials on how to run the calibration tool for monocular and stereo cameras. Originally posted by mohito on ros. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw?. Ros Camera Calibration Yaml File.
From zhaoxuhui.top
利用ROS的Camera Calibration工具进行相机标定(USB相机与D435i) Ros Camera Calibration Yaml File There are tutorials on how to run the calibration tool for monocular and stereo cameras. These are mainly used internally by camera drivers and. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. Creating a yaml file the camera calibration parser helps you to create a yml file, which. Ros Camera Calibration Yaml File.
From www.youtube.com
ROS Camera Calibration (calibrating process) YouTube Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera; Originally posted by mohito on ros. Calibrate all cameras and find. Ros Camera Calibration Yaml File.
From wiki.ros.org
camera_pose_calibration ROS Wiki Ros Camera Calibration Yaml File There are tutorials on how to run the calibration tool for monocular and stereo cameras. To run the cameracalibrator node for a monocular camera. These are mainly used internally by camera drivers and. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Create the calibration files for each camera; Calibrate all. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS下采用camera_calibration进行单目相机标定_camcalib相机标定库CSDN博客 Ros Camera Calibration Yaml File Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Create the calibration files for each camera; Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Calibrate all cameras and find. Ros Camera Calibration Yaml File.
From www.researchgate.net
6 Camera calibration examples with ROS camera_calibration package Ros Camera Calibration Yaml File How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Originally posted by mohito on ros. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Calibrate all cameras and find a way to check the quality of the calibration files; Camera_calibration allows easy calibration of monocular or. Ros Camera Calibration Yaml File.
From www.youtube.com
How to use Cameras in ROS (Sim Camera and Pi Camera) YouTube Ros Camera Calibration Yaml File Originally posted by mohito on ros. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Create the calibration files for each camera; Calibrate all cameras and find a way to check the quality of the calibration files; Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. These are mainly used. Ros Camera Calibration Yaml File.
From wiki.ros.org
camera_calibration/Tutorials/MonocularCalibration ROS Wiki Ros Camera Calibration Yaml File Calibrate all cameras and find a way to check the quality of the calibration files; Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. Create the calibration files for each. Ros Camera Calibration Yaml File.
From reachpranjal19.medium.com
Intrinsic camera calibration in ROS Melodic by Pranjal Paul Medium Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. There are tutorials on how to run the calibration tool for monocular and stereo cameras. Create the calibration files for each camera; These are mainly used internally by camera drivers and. Creating a yaml file the camera. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros camera driver using the camera_info_url parameter. Originally posted by mohito on ros. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Create the calibration files for each camera;. Ros Camera Calibration Yaml File.
From discourse.ros.org
Calibration Toolkit Can't extract points from the grapped lidar for Ros Camera Calibration Yaml File There are tutorials on how to run the calibration tool for monocular and stereo cameras. Create the calibration files for each camera; Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Calibrate all cameras and find a way to check the quality of the calibration files; These are mainly used internally by camera drivers and. Creating a yaml file. Ros Camera Calibration Yaml File.
From wiki.ros.org
industrial_extrinsic_cal/Tutorials/Camera to Target ROS Wiki Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Calibrate all cameras and find a way to check the quality of the calibration files; These are mainly used internally by camera drivers. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS摄像头标定_ros camera calibration yamlCSDN博客 Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files. Ros Camera Calibration Yaml File.
From wiki.ros.org
camera_calibration/Tutorials/StereoCalibration ROS Wiki Ros Camera Calibration Yaml File To run the cameracalibrator node for a monocular camera. Create the calibration files for each camera; How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? There are tutorials on how to run the calibration tool for monocular and stereo cameras. Camera_calibration allows easy calibration of monocular or stereo cameras using a. Ros Camera Calibration Yaml File.
From blog.csdn.net
【ROS实践入门(八)ROS使用USB视觉传感器相机】_基于ros系统开启usb相机,完成视频图像的边缘检测CSDN博客 Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera; How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Calibrate all cameras and find a way to check the quality. Ros Camera Calibration Yaml File.
From github.com
How to start camera node with yaml file? · Issue 2900 · IntelRealSense Ros Camera Calibration Yaml File How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? Calibrate all cameras and find a way to check the quality of the calibration files; Create the calibration files for each camera; Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. There are tutorials on how to. Ros Camera Calibration Yaml File.
From www.huyaoyu.com
Convert results from ROS camera_calibration into format used by OpenCV Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Originally posted by mohito on ros. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. Create the calibration files for each camera; Creating a yaml file the camera calibration parser helps you to create a yml file, which you can load with nearly all ros. Ros Camera Calibration Yaml File.
From www.youtube.com
Calibrating a Monocular Camera with ROS YouTube Ros Camera Calibration Yaml File Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. There are tutorials on how to run the calibration tool for monocular and stereo cameras. Originally posted by mohito on ros. To run the cameracalibrator node for a monocular camera. These are mainly used internally by camera drivers and. Calibrate all cameras and find a way. Ros Camera Calibration Yaml File.
From blog.csdn.net
ROS下采用camera_calibration进行单目相机标定_camcalib相机标定库CSDN博客 Ros Camera Calibration Yaml File Create the calibration files for each camera; Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. To run the cameracalibrator node for a monocular camera. Creating a yaml file the camera calibration parser helps you to create a yml file, which. Ros Camera Calibration Yaml File.
From answers.ros.org
How Does a Camera Calibration File Work in ROS 2? ROS Answers Open Ros Camera Calibration Yaml File Originally posted by mohito on ros. Camera_calibration_parsers contains c++ functions for reading and writing camera parameters. How can i publish cam_info messages using only the yaml file so that i can rectify the image_raw? These are mainly used internally by camera drivers and. To run the cameracalibrator node for a monocular camera. Creating a yaml file the camera calibration parser. Ros Camera Calibration Yaml File.