Arduino Servo Initial Position . In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. Hi there, i'm dealing with a s3003 servo: After that, we will look into controlling a servo with a potentiometer and how. As soon as you’ve got this example project up. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. The frequency of the control signal should be. A servo motor is controlled. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. // create servo object to control a servo. // a maximum of eight servo objects can be created. I have this code that everytime i push the button it makes the servo go to a randomly. A servo motor is controlled by sending a series of pulses through the signal line. With the first code example, you can control both the position as well as the speed of the servo motor.
from maker.pro
In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. // create servo object to control a servo. After that, we will look into controlling a servo with a potentiometer and how. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. A servo motor is controlled. // a maximum of eight servo objects can be created. With the first code example, you can control both the position as well as the speed of the servo motor. I have this code that everytime i push the button it makes the servo go to a randomly. As soon as you’ve got this example project up. Hi there, i'm dealing with a s3003 servo:
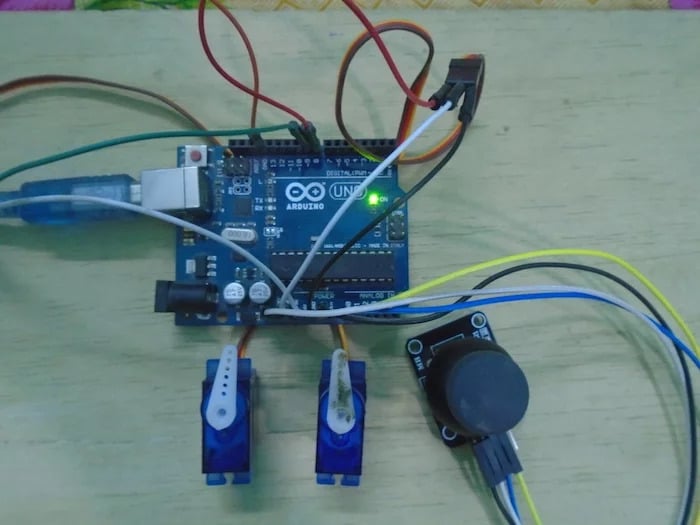
How to Control Servo Motors With an Arduino and Joystick Arduino
Arduino Servo Initial Position The frequency of the control signal should be. The frequency of the control signal should be. As soon as you’ve got this example project up. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. With the first code example, you can control both the position as well as the speed of the servo motor. // a maximum of eight servo objects can be created. A servo motor is controlled. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. A servo motor is controlled by sending a series of pulses through the signal line. // create servo object to control a servo. I have this code that everytime i push the button it makes the servo go to a randomly. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. Hi there, i'm dealing with a s3003 servo: After that, we will look into controlling a servo with a potentiometer and how.
From www.youtube.com
Arduino Brushed DC Servo Motor Position Control Using Joystick YouTube Arduino Servo Initial Position With the first code example, you can control both the position as well as the speed of the servo motor. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and. Arduino Servo Initial Position.
From www.youtube.com
Control Servo Motor using Rotary Encoder Displaying The angle in LCD Arduino Servo Initial Position After that, we will look into controlling a servo with a potentiometer and how. With the first code example, you can control both the position as well as the speed of the servo motor. As soon as you’ve got this example project up. In this tutorial, we will learn how to control a standard servo motor, to go back and. Arduino Servo Initial Position.
From circuitdigest.com
How to Interface a Servo Motor with Arduino Arduino Servo Initial Position // create servo object to control a servo. A servo motor is controlled by sending a series of pulses through the signal line. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. In this tutorial, we will learn how to control a standard servo motor, to go back. Arduino Servo Initial Position.
From www.visuino.com
Get Servo Motor Positions From SD Card Visuino Visual Development Arduino Servo Initial Position One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. // create servo object to control a servo. As soon as you’ve got this example project up. A servo motor is controlled. The frequency of the control signal should be. I have this code that everytime i push the button. Arduino Servo Initial Position.
From www.makerguides.com
How to Control Servo Motors with Arduino (3 Examples) Arduino Servo Initial Position The frequency of the control signal should be. With the first code example, you can control both the position as well as the speed of the servo motor. Hi there, i'm dealing with a s3003 servo: Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. // create servo. Arduino Servo Initial Position.
From www.circuitbasics.com
How to Control Servos With the Arduino Circuit Basics Arduino Servo Initial Position A servo motor is controlled. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. As soon as you’ve got this example project up. After that, we will look into controlling a servo with a potentiometer and how. With the first code example, you. Arduino Servo Initial Position.
From mschoeffler.com
Arduino Tutorial MG 996R Servo Motor Michael Schoeffler Arduino Servo Initial Position Hi there, i'm dealing with a s3003 servo: Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. // create servo object to control a servo. // a maximum of eight servo objects can be created. One that rotates about 180 degrees, uses a pulse width of 1000 to. Arduino Servo Initial Position.
From www.youtube.com
How to Adjust and Set Your Servo Motor Angle with Arduino A demo for Arduino Servo Initial Position As soon as you’ve got this example project up. I have this code that everytime i push the button it makes the servo go to a randomly. With the first code example, you can control both the position as well as the speed of the servo motor. In this tutorial, we will learn how to control a standard servo motor,. Arduino Servo Initial Position.
From www.visuino.eu
Get Servo Motor Positions From SD Card Visuino Visual Development Arduino Servo Initial Position In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. I have this code that everytime i push the button it makes the servo go to a randomly. A servo motor is controlled. A servo motor is controlled by sending a series of pulses through the signal line.. Arduino Servo Initial Position.
From circuitspedia.com
Arduino Servo Motor Control Using Potentiometer Push Button Arduino Servo Initial Position Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. A servo motor is controlled by sending a series of pulses through the signal line. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. After that, we will. Arduino Servo Initial Position.
From www.pinterest.com
How Servo Motors Work & How To Control Servos using Arduino Arduino Arduino Servo Initial Position In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. // a maximum of eight servo objects can be created. After that, we will. Arduino Servo Initial Position.
From www.artofit.org
Servo motor control by mpu 6050 accelerometer and gyroscope using servo Arduino Servo Initial Position Hi there, i'm dealing with a s3003 servo: The frequency of the control signal should be. With the first code example, you can control both the position as well as the speed of the servo motor. // create servo object to control a servo. // a maximum of eight servo objects can be created. A servo motor is controlled. In. Arduino Servo Initial Position.
From www.cristor.dz
Email mesaj Expert arduino and servo motor both directions Arduino Servo Initial Position In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. With the first code example, you can control both the position as well as the speed of the servo motor. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to. Arduino Servo Initial Position.
From www.instructables.com
How to Use a Servo Motor Arduino Tutorial 4 Steps Instructables Arduino Servo Initial Position I have this code that everytime i push the button it makes the servo go to a randomly. With the first code example, you can control both the position as well as the speed of the servo motor. // create servo object to control a servo. After that, we will look into controlling a servo with a potentiometer and how.. Arduino Servo Initial Position.
From makitrun.com
LEÇON 14 Control the position of a servo from a potentiometer using Arduino Servo Initial Position With the first code example, you can control both the position as well as the speed of the servo motor. A servo motor is controlled by sending a series of pulses through the signal line. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. // a maximum of eight. Arduino Servo Initial Position.
From www.instructables.com
Arduino Programmable Robotic Arm (Record and Repeat of the Servo Arduino Servo Initial Position // a maximum of eight servo objects can be created. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. Hi there, i'm dealing with a s3003 servo:. Arduino Servo Initial Position.
From steamtraininfo.com
How To Set A Micro Servo Position For Arduino Projects Arduino Servo Initial Position The frequency of the control signal should be. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. A servo motor is controlled by sending a series of pulses through the signal line. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated. Arduino Servo Initial Position.
From mechatrofice.com
Servo control by push button switch arduino Arduino Servo Initial Position In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. A servo motor is controlled. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. I have this code that everytime i push the button it makes. Arduino Servo Initial Position.
From how2electronics.com
How to Control Multiple Servo Motors with Arduino Arduino Servo Initial Position As soon as you’ve got this example project up. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. // create servo object to control a servo. // a maximum of eight servo objects can be created. I have this code that everytime i. Arduino Servo Initial Position.
From www.circuitbasics.com
How to Control Servos With the Arduino Circuit Basics Arduino Servo Initial Position After that, we will look into controlling a servo with a potentiometer and how. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. With the first code example, you can control both the position as well as the speed of the servo motor.. Arduino Servo Initial Position.
From create.arduino.cc
Controling servo motors with buttons and arduino Arduino Project Hub Arduino Servo Initial Position A servo motor is controlled. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control its position. I have this code that everytime i push the button it makes the servo go to a randomly. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated. Arduino Servo Initial Position.
From www.build-electronic-circuits.com
Arduino Servo Motor Reference Code and Wiring Example Arduino Servo Initial Position A servo motor is controlled by sending a series of pulses through the signal line. I have this code that everytime i push the button it makes the servo go to a randomly. A servo motor is controlled. After that, we will look into controlling a servo with a potentiometer and how. // a maximum of eight servo objects can. Arduino Servo Initial Position.
From www.circuits-diy.com
Interfacing Servo Motor with Arduino Arduino Servo Initial Position As soon as you’ve got this example project up. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. Hi there, i'm dealing with a s3003 servo: // create servo object to control a servo. The frequency of the control signal should be. One. Arduino Servo Initial Position.
From www.otronic.nl
Schéma de raccordement de servomoteur et code d'exemple pour Arduino Arduino Servo Initial Position As soon as you’ve got this example project up. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. The frequency of the control signal should be. A servo motor is controlled. I have this code that everytime i push the button it makes the servo go to. Arduino Servo Initial Position.
From polluxlabs.net
Arduino & Servo So funktioniert's! Arduino Servo Initial Position The frequency of the control signal should be. I have this code that everytime i push the button it makes the servo go to a randomly. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. // a maximum of eight servo objects can. Arduino Servo Initial Position.
From massivefiln.weebly.com
Continuous servo motor arduino code massivefiln Arduino Servo Initial Position As soon as you’ve got this example project up. With the first code example, you can control both the position as well as the speed of the servo motor. The frequency of the control signal should be. // create servo object to control a servo. Once the servo motor is connected, the arduino nano can send pulse signals to the. Arduino Servo Initial Position.
From www.instructables.com
Serial Servo Controller W/Arduino Control Up to 12 Servos at Once Arduino Servo Initial Position I have this code that everytime i push the button it makes the servo go to a randomly. After that, we will look into controlling a servo with a potentiometer and how. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. As soon as you’ve got this. Arduino Servo Initial Position.
From arduino.stackexchange.com
arduino mega Servos "jump to fixed position" at startup when powered Arduino Servo Initial Position I have this code that everytime i push the button it makes the servo go to a randomly. One that rotates about 180 degrees, uses a pulse width of 1000 to 2000 us, repeated every 20ms or thereabouts. As soon as you’ve got this example project up. Hi there, i'm dealing with a s3003 servo: // a maximum of eight. Arduino Servo Initial Position.
From osoyoo.com
Arduino lesson Controlling Servo Motor with IR Remote « Arduino Servo Initial Position In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. A servo motor is controlled by sending a series of pulses through the signal line. The frequency of the control signal should be. After that, we will look into controlling a servo with a potentiometer and how. Once. Arduino Servo Initial Position.
From www.visuino.com
Get Servo Motor Positions From SD Card Visuino Visual Development Arduino Servo Initial Position A servo motor is controlled by sending a series of pulses through the signal line. I have this code that everytime i push the button it makes the servo go to a randomly. // create servo object to control a servo. After that, we will look into controlling a servo with a potentiometer and how. // a maximum of eight. Arduino Servo Initial Position.
From maker.pro
How to Control Servo Motors With an Arduino and Joystick Arduino Arduino Servo Initial Position The frequency of the control signal should be. Hi there, i'm dealing with a s3003 servo: A servo motor is controlled. After that, we will look into controlling a servo with a potentiometer and how. A servo motor is controlled by sending a series of pulses through the signal line. Once the servo motor is connected, the arduino nano can. Arduino Servo Initial Position.
From mechatrofice.com
Servo Motor Control using Arduino Tutorial and Code Arduino Servo Initial Position Hi there, i'm dealing with a s3003 servo: // a maximum of eight servo objects can be created. A servo motor is controlled. I have this code that everytime i push the button it makes the servo go to a randomly. Once the servo motor is connected, the arduino nano can send pulse signals to the servo motor to control. Arduino Servo Initial Position.
From www.babezdoor.com
Servo Motor With Arduino Uno And Potentiometer Wiring Diagram Schematic Arduino Servo Initial Position A servo motor is controlled. // create servo object to control a servo. Hi there, i'm dealing with a s3003 servo: The frequency of the control signal should be. A servo motor is controlled by sending a series of pulses through the signal line. After that, we will look into controlling a servo with a potentiometer and how. In this. Arduino Servo Initial Position.
From www.makerdaddy.com
Arduino Lesson 8 Control Servomotor and LEDs using Time Arduino Servo Initial Position After that, we will look into controlling a servo with a potentiometer and how. In this tutorial, we will learn how to control a standard servo motor, to go back and forth across 180 degrees, using a `for loop ()`. As soon as you’ve got this example project up. In this arduino servo motor tutorial, you’ll learn how to control. Arduino Servo Initial Position.
From insta-arduino.tumblr.com
InstaArduino Playing with arduino servo arduino servo learn... Arduino Servo Initial Position The frequency of the control signal should be. I have this code that everytime i push the button it makes the servo go to a randomly. In this arduino servo motor tutorial, you’ll learn how to control a servo motor using an arduino uno board and a potentiometer. A servo motor is controlled by sending a series of pulses through. Arduino Servo Initial Position.