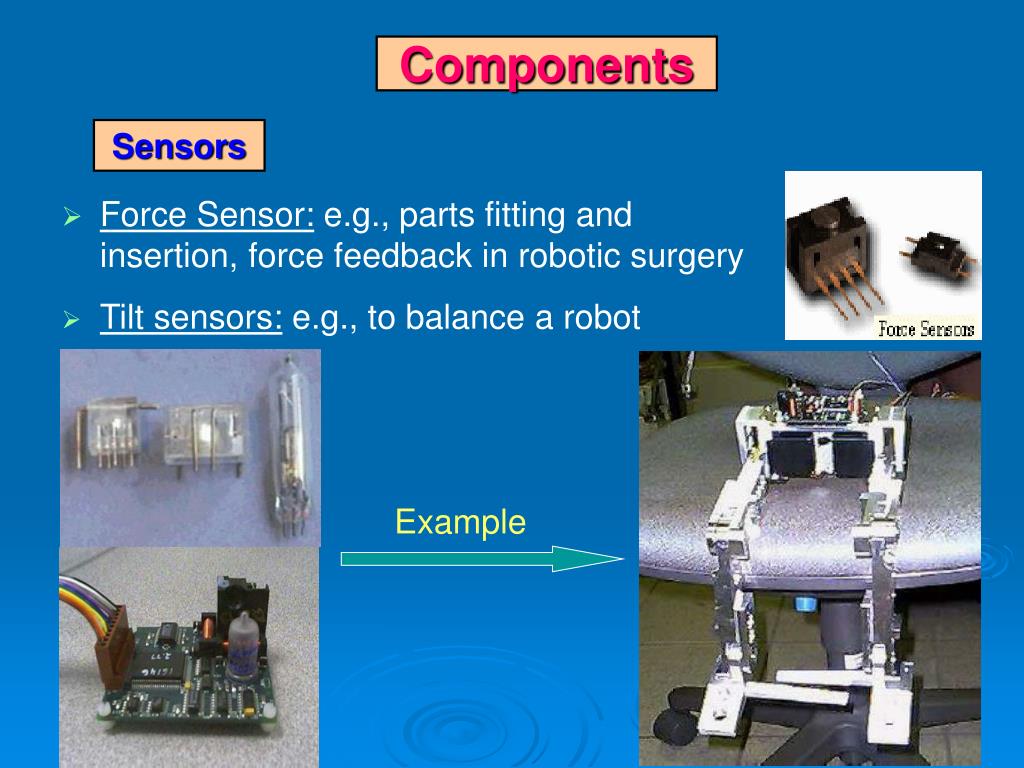
Feedback Robot Sensor . Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Contact or force sensors help robots grab objects without damaging them. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. For instance, a robot might adjust its speed or force. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors.
from www.slideserve.com
Contact or force sensors help robots grab objects without damaging them. For instance, a robot might adjust its speed or force. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch.
PPT INTRODUCTION TO ROBOTICS PowerPoint Presentation, free download
Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. For instance, a robot might adjust its speed or force. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Contact or force sensors help robots grab objects without damaging them. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors.
From studylib.net
robot sensors Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. These sensors detect the amount. Feedback Robot Sensor.
From therobota.com
10 types of robot sensors TheRobota Feedback Robot Sensor For instance, a robot might adjust its speed or force. Contact or force sensors help robots grab objects without damaging them. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Feedback sensors are. Feedback Robot Sensor.
From www.mdpi.com
Robotics Free FullText Robotics Five Senses plus One—An Overview Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. For instance, a robot might adjust its speed or force. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Feedback. Feedback Robot Sensor.
From www.dreamstime.com
Robotic Hand with Safety Features, Such As Sensors and Tactile Feedback Feedback Robot Sensor For instance, a robot might adjust its speed or force. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Just as humans rely on feedback to learn and improve,. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText Experimental Investigations into Using Feedback Robot Sensor Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. These sensors. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText Grip Stabilization through Independent Feedback Robot Sensor Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. These sensors detect. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText Grasping Force Control of MultiFingered Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. For instance, a robot might. Feedback Robot Sensor.
From www.slideserve.com
PPT Robot Sensing and Sensors PowerPoint Presentation, free download Feedback Robot Sensor For instance, a robot might adjust its speed or force. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Commonly used sensors in robotic feedback systems include optical encoders for. Feedback Robot Sensor.
From automationforum.co
What are sensors on a robot and why are sensors important to robots Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. These sensors detect the amount of force applied and provide feedback to the. Feedback Robot Sensor.
From www.tekscan.com
Force Sensors in Robotic Design Tekscan Feedback Robot Sensor These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Contact or force sensors. Feedback Robot Sensor.
From www.dreamstime.com
Robotic Hand with Safety Features, Such As Sensors and Tactile Feedback Feedback Robot Sensor These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. For instance, a robot might adjust its speed or force. Contact or force sensors help robots grab objects without damaging them. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Feedback sensors are. Feedback Robot Sensor.
From news.mit.edu
Giving robots a sense of touch MIT News Massachusetts Institute of Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. For instance, a robot might adjust its speed or force. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Robotic tactile. Feedback Robot Sensor.
From www.online-sciences.com
Robotic sensing (Robot Sensors) uses, types & importance Science online Feedback Robot Sensor Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Contact or force sensors help robots grab objects without damaging them. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Commonly used sensors in robotic feedback systems include optical encoders. Feedback Robot Sensor.
From www.futek.com
Laparoscopic Grasper with Force Perception FUTEK Feedback Robot Sensor For instance, a robot might adjust its speed or force. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. These sensors detect the amount of force applied and. Feedback Robot Sensor.
From www.weforum.org
Balance feedback takes twolegged robots' precision to a new level Feedback Robot Sensor Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Sensor. Feedback Robot Sensor.
From www.slideserve.com
PPT INTRODUCTION TO ROBOTICS PowerPoint Presentation, free download Feedback Robot Sensor Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. For instance, a robot might adjust its speed or force. Contact or force sensors help robots grab objects without damaging them. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Commonly. Feedback Robot Sensor.
From www.youtube.com
Forcefeedback robotic teleoperation using proximity sensors YouTube Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. For instance, a robot might adjust its speed or. Feedback Robot Sensor.
From www.futek.com
Haptic Feedback Robotic Surgery FUTEK Feedback Robot Sensor For instance, a robot might adjust its speed or force. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Commonly used sensors in robotic feedback systems include optical encoders. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText RoboticBased WellBeing Monitoring and Feedback Robot Sensor Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Commonly used. Feedback Robot Sensor.
From www.automate.org
Sensors & Feedback Devices Automation Products Feedback Robot Sensor Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. For instance, a robot might. Feedback Robot Sensor.
From www.mdpi.com
Micromachines Free FullText Development of Flexible Robot Skin for Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Sensor feedback refers. Feedback Robot Sensor.
From armlab.gatech.edu
Haptic FeedbackEnabled Powered Prosthetic Devices Adaptive Robotic Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. For instance, a robot might adjust its speed or force. These. Feedback Robot Sensor.
From www.automation.com
SensoPart introduces VISOR Robotic sensor Feedback Robot Sensor Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. For instance, a robot. Feedback Robot Sensor.
From www.futurelearn.com
What makes a robot a robot? Feedback Robot Sensor Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Feedback sensors are used to detect the actuator's output so that the control system can correct for external factors. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing.. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText Muecas A MultiSensor Robotic Head for Feedback Robot Sensor Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Contact or force sensors help robots grab objects without damaging them. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Feedback sensors are used to detect the actuator's. Feedback Robot Sensor.
From www.youtube.com
Controlling Arduino Robot Arm with Ultrasonic Sensor YouTube Feedback Robot Sensor For instance, a robot might adjust its speed or force. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Contact or force sensors help robots grab objects without damaging them.. Feedback Robot Sensor.
From news.mit.edu
“Sensorized” skin helps soft robots find their bearings MIT News Feedback Robot Sensor For instance, a robot might adjust its speed or force. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Feedback sensors are used to detect the actuator's output so. Feedback Robot Sensor.
From www.vrogue.co
How To Build A Robotic Hand With Haptic Feedback Usin vrogue.co Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Contact or force sensors help robots grab objects without damaging them. For instance, a robot might adjust its speed or force. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Sensor feedback refers. Feedback Robot Sensor.
From www.zycon.com
Miniature LVDT Position Sensors Provide Highly Accurate Position Feedback Robot Sensor Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. For instance, a robot might adjust its speed or force. Sensor feedback refers to the data and information collected by. Feedback Robot Sensor.
From www.frontiersin.org
Frontiers Active Haptic Perception in Robots A Review Feedback Robot Sensor Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. For instance, a robot might adjust its speed or force. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Just as humans rely on feedback to learn and improve, robots. Feedback Robot Sensor.
From www.protolabs.com
Manufacturing Robotics Report Hardware Blog Protolabs Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors. Feedback Robot Sensor.
From blog.robotiq.com
7 Types of Industrial Robot Sensors Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Contact or force sensors help robots grab objects without damaging them. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. These sensors detect the amount of force applied and provide feedback. Feedback Robot Sensor.
From www.semanticscholar.org
A wearable device for controlling a robot gripper with fingertip Feedback Robot Sensor For instance, a robot might adjust its speed or force. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Commonly used sensors in robotic feedback systems include optical encoders for. Feedback Robot Sensor.
From www.dreamstime.com
Robotic Hand with Safety Features, Such As Sensors and Tactile Feedback Feedback Robot Sensor Contact or force sensors help robots grab objects without damaging them. These sensors detect the amount of force applied and provide feedback to the robot so it can adjust its. Just as humans rely on feedback to learn and improve, robots use feedback from sensors to refine their operations. For instance, a robot might adjust its speed or force. Feedback. Feedback Robot Sensor.
From www.mdpi.com
Sensors Free FullText A New Tactile Transfer Cell Using Feedback Robot Sensor Commonly used sensors in robotic feedback systems include optical encoders for position feedback, accelerometers and gyroscopes for. Sensor feedback refers to the data and information collected by sensors that monitor a robot's environment and internal state, allowing. Robotic tactile feedback refers to the technology that enables robots to sense and respond to physical touch, closely mimicking human touch. Feedback sensors. Feedback Robot Sensor.