Yaw Pitch Roll Github . Quaternion to yaw, pitch, and roll angles. # transform gyro measurement into roll pitch yaw: This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Pitch = orientation[1][0] #theta # from. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Public void onsensorchanged (sensorevent event) {. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. It is also possible to input your own angles and hit the set button to update them.
from qiangsun89.github.io
Quaternion to yaw, pitch, and roll angles. Pitch = orientation[1][0] #theta # from. If (event.sensor.gettype () == sensor.type_rotation_vector) {. # transform gyro measurement into roll pitch yaw: Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. It is also possible to input your own angles and hit the set button to update them. Public void onsensorchanged (sensorevent event) {. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Manipulate the sliders to change roll/pitch/yaw.
ROS中roll pitch yaw分别是绕哪个轴转 知识的搬运工
Yaw Pitch Roll Github Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. Pitch = orientation[1][0] #theta # from. # transform gyro measurement into roll pitch yaw: If (event.sensor.gettype () == sensor.type_rotation_vector) {. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. It is also possible to input your own angles and hit the set button to update them. Quaternion to yaw, pitch, and roll angles.
From github.com
GitHub Ssong24/YawPitchRollFromIOS iOS demo app which reads Yaw Yaw Pitch Roll Github # transform gyro measurement into roll pitch yaw: Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. It is also possible to input your own angles and hit the set button to update them. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Pitch =. Yaw Pitch Roll Github.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Github Manipulate the sliders to change roll/pitch/yaw. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Quaternion to yaw, pitch, and roll angles. Pitch = orientation[1][0] #theta # from. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. # transform gyro measurement into roll pitch yaw:. Yaw Pitch Roll Github.
From qiangsun89.github.io
ROS中roll pitch yaw分别是绕哪个轴转 知识的搬运工 Yaw Pitch Roll Github This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Public void onsensorchanged (sensorevent event) {. # transform gyro measurement into roll pitch yaw: This document describes how the orientation of. Yaw Pitch Roll Github.
From github.com
GitHub nopnop2002/espidflsm6ds3 A demo showing the pose of the Yaw Pitch Roll Github # transform gyro measurement into roll pitch yaw: Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Quaternion to yaw, pitch, and roll angles. Pitch = orientation[1][0] #theta # from. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. This document describes how the orientation. Yaw Pitch Roll Github.
From sites.google.com
Instrumentation The Smart Gimbal Yaw Pitch Roll Github Manipulate the sliders to change roll/pitch/yaw. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. # transform gyro measurement into roll pitch yaw: Quaternion to yaw, pitch, and roll angles. If (event.sensor.gettype () == sensor.type_rotation_vector) {. It is also possible to input your own angles and hit the set button to update them.. Yaw Pitch Roll Github.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Yaw Pitch Roll Github Quaternion to yaw, pitch, and roll angles. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. Pitch = orientation[1][0] #theta # from.. Yaw Pitch Roll Github.
From github.com
Calibrating Yaw Pitch Roll angles to zero whenever · Issue 504 Yaw Pitch Roll Github This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. It is also possible to input your own angles and hit the set button to update them. Public void onsensorchanged (sensorevent event) {. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Quaternion to yaw, pitch,. Yaw Pitch Roll Github.
From www.youtube.com
Pitch Yaw Roll Explained YouTube Yaw Pitch Roll Github Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. # transform gyro measurement into roll pitch yaw: This repository provides two different methods. Yaw Pitch Roll Github.
From www.droneybee.com
ROLL, PITCH, YAW Yaw Pitch Roll Github Manipulate the sliders to change roll/pitch/yaw. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Pitch = orientation[1][0] #theta # from. # transform gyro measurement into roll pitch yaw: Public void onsensorchanged (sensorevent event). Yaw Pitch Roll Github.
From github.com
Roll, pitch, yaw keep changing while using MPU9250 · Issue 450 Yaw Pitch Roll Github If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. It is also possible to input your own angles and hit the set. Yaw Pitch Roll Github.
From github.com
GitHub purnaal/GyroFusion360DynamicRollPitchYawAnalyser An Yaw Pitch Roll Github If (event.sensor.gettype () == sensor.type_rotation_vector) {. Public void onsensorchanged (sensorevent event) {. It is also possible to input your own angles and hit the set button to update them. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. This repository provides two different methods to estimate the pose (rotation angles) of. Yaw Pitch Roll Github.
From www.researchgate.net
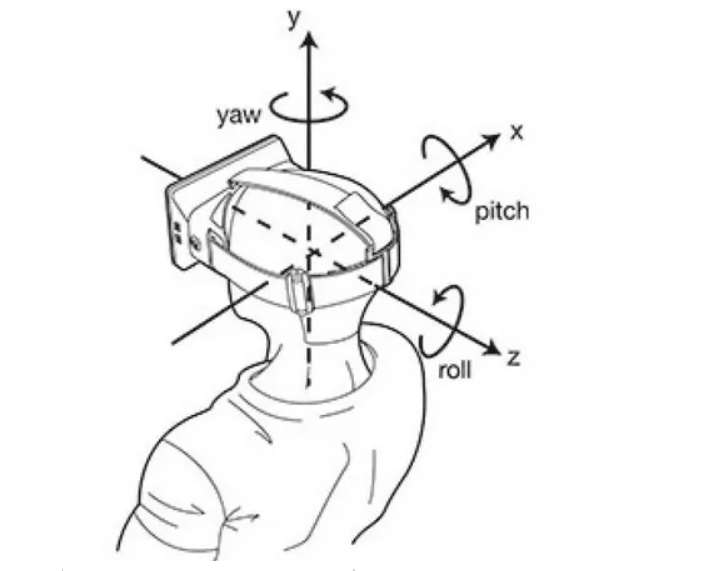
Orientation of the head in terms of pitch, roll, and yaw movements Yaw Pitch Roll Github Quaternion to yaw, pitch, and roll angles. If (event.sensor.gettype () == sensor.type_rotation_vector) {. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Manipulate the sliders to change roll/pitch/yaw. It is also possible to input your. Yaw Pitch Roll Github.
From joiqdydbe.blob.core.windows.net
Yaw Pitch Roll Rocket at Josefa Jackson blog Yaw Pitch Roll Github It is also possible to input your own angles and hit the set button to update them. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Pitch = orientation[1][0] #theta # from. Public void onsensorchanged (sensorevent event) {. Quaternion to yaw, pitch, and roll angles. This repository provides two different methods to estimate. Yaw Pitch Roll Github.
From qiangsun89.github.io
ROS中roll pitch yaw分别是绕哪个轴转 知识的搬运工 Yaw Pitch Roll Github This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. # transform gyro measurement into roll pitch yaw: Quaternion to yaw, pitch, and. Yaw Pitch Roll Github.
From ouo0725.github.io
Inertial Measurement Unit (IMU) MCU course Yaw Pitch Roll Github It is also possible to input your own angles and hit the set button to update them. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Manipulate the sliders to change roll/pitch/yaw. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Public void onsensorchanged (sensorevent event) {. This repository provides two different methods to estimate the. Yaw Pitch Roll Github.
From github.com
Head position (Yaw, Roll, Pitch) · Issue 107 · justadudewhohacks/face Yaw Pitch Roll Github Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Pitch = orientation[1][0] #theta # from. It is also possible to input your own angles and hit the set button to update them. This repository provides two different methods to estimate the pose (rotation angles) of a detected. Yaw Pitch Roll Github.
From www.simracingstudio.com
Motion 101 Roll, Pitch, Yaw, Sway, Surge, Heave and Traction Loss Yaw Pitch Roll Github This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Pitch = orientation[1][0] #theta # from. Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. If (event.sensor.gettype () == sensor.type_rotation_vector) {. # transform gyro measurement into roll pitch yaw: It is also possible to input your own angles and. Yaw Pitch Roll Github.
From github.com
GitHub ranickpatra/MPU6050YawPitchRoll Yaw Pitch Roll Github It is also possible to input your own angles and hit the set button to update them. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. # transform gyro measurement into roll pitch yaw: Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. This repository provides two different. Yaw Pitch Roll Github.
From github.com
gimbal orientation broken in case of pitch == 90 and yaw != 0 · Issue Yaw Pitch Roll Github Public void onsensorchanged (sensorevent event) {. Quaternion to yaw, pitch, and roll angles. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Pitch = orientation[1][0] #theta # from. It is also possible to input your own angles and hit the set button to update them. If (event.sensor.gettype () == sensor.type_rotation_vector) {.. Yaw Pitch Roll Github.
From morventamisha.blogspot.com
14+ Pitch Roll Yaw Diagram MorvenTamisha Yaw Pitch Roll Github This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Public void onsensorchanged (sensorevent event) {. Quaternion to yaw, pitch, and roll angles. # transform gyro measurement into roll pitch yaw: Manipulate the sliders to change roll/pitch/yaw. Pitch = orientation[1][0] #theta # from. If (event.sensor.gettype () == sensor.type_rotation_vector) {. This document describes how. Yaw Pitch Roll Github.
From www.researchgate.net
The defined xs, ys and zs directions, roll, pitch and yaw orientations Yaw Pitch Roll Github Pitch = orientation[1][0] #theta # from. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. # transform gyro measurement into roll pitch yaw:. Yaw Pitch Roll Github.
From github.com
GitHub jerryhouuu/FaceYawRollPitchfromPoseEstimationusing Yaw Pitch Roll Github This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. # transform gyro measurement into roll pitch yaw: Public void onsensorchanged (sensorevent event) {. Manipulate the sliders to change roll/pitch/yaw. It is also possible to input your own angles and hit the set button to update them. This document describes how the orientation. Yaw Pitch Roll Github.
From www.freepik.es
Roll, pitch, yaw tres ángulos de rotación correspondientes a los Yaw Pitch Roll Github If (event.sensor.gettype () == sensor.type_rotation_vector) {. # transform gyro measurement into roll pitch yaw: Manipulate the sliders to change roll/pitch/yaw. Quaternion to yaw, pitch, and roll angles. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. It is also possible to input your own angles and hit the set button to. Yaw Pitch Roll Github.
From github.com
yaw, pitch, roll from pose estimation. · Issue 1 · fdclgwu/aruco Yaw Pitch Roll Github This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Public void onsensorchanged (sensorevent event) {. It is also. Yaw Pitch Roll Github.
From github.com
Documentation on Roll, Pitch, Yaw Angle Convention for Calibration Yaw Pitch Roll Github Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. # transform gyro measurement into roll pitch yaw: Public void onsensorchanged (sensorevent event) {. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. It is also possible to input your own angles and hit the. Yaw Pitch Roll Github.
From github.com
GitHub agungmadani/processingpitchyawrollpanzoomrotate Yaw Pitch Roll Github Quaternion to yaw, pitch, and roll angles. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. It is also possible to input your own angles and hit the set button to update them. Public void onsensorchanged (sensorevent event) {. #. Yaw Pitch Roll Github.
From blog.csdn.net
关于pitch、roll、 yaw的示意图和Laya.Quaternion.createFromYawPitchRoll用法CSDN博客 Yaw Pitch Roll Github It is also possible to input your own angles and hit the set button to update them. # transform gyro measurement into roll pitch yaw: This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Manipulate the sliders to change roll/pitch/yaw. Public void onsensorchanged (sensorevent event) {. Pitch = orientation[1][0] #theta # from.. Yaw Pitch Roll Github.
From github.com
Out put yaw pitch roll command to quick test new drone design. · Issue Yaw Pitch Roll Github Manipulate the sliders to change roll/pitch/yaw. It is also possible to input your own angles and hit the set button to update them. # transform gyro measurement into roll pitch yaw: Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Pitch = orientation[1][0] #theta # from. Quaternion. Yaw Pitch Roll Github.
From homveloper.github.io
UE4 Pitch Yaw Roll 집이 좋은 개발자의 게임 개발 Yaw Pitch Roll Github If (event.sensor.gettype () == sensor.type_rotation_vector) {. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Pitch = orientation[1][0] #theta # from. Quaternion to yaw, pitch, and roll angles. Manipulate the sliders to change roll/pitch/yaw. It. Yaw Pitch Roll Github.
From github.com
how to get Roll, Yaw, Pitch Angles? · Issue 3 · mpatacchiola/deepgaze Yaw Pitch Roll Github # transform gyro measurement into roll pitch yaw: It is also possible to input your own angles and hit the set button to update them. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Public void onsensorchanged (sensorevent event) {. Pitch = orientation[1][0] #theta # from. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. This. Yaw Pitch Roll Github.
From triped-robot.github.io
About the Matlab Simulation TriPed Project Yaw Pitch Roll Github Quaternion to yaw, pitch, and roll angles. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Pitch = orientation[1][0] #theta # from. It is also possible to input your own angles and hit the set button to update them. Public void onsensorchanged (sensorevent event) {. # transform gyro measurement into roll pitch yaw:. Yaw Pitch Roll Github.
From github.com
Calibrating Yaw Pitch Roll angles to zero whenever · Issue 504 Yaw Pitch Roll Github Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. If (event.sensor.gettype () == sensor.type_rotation_vector) {. Pitch = orientation[1][0] #theta # from. It is also possible to input your own angles and hit the set button to update them. This document describes how the orientation of the imu in terms of yaw,pitch, and roll. Yaw Pitch Roll Github.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Github Quaternion to yaw, pitch, and roll angles. Public void onsensorchanged (sensorevent event) {. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. Pitch = orientation[1][0] #theta # from. # transform gyro measurement into roll pitch yaw: If (event.sensor.gettype () == sensor.type_rotation_vector) {. Manipulate the sliders to change roll/pitch/yaw. This repository provides two different. Yaw Pitch Roll Github.
From github.com
GitHub zeynepdicle/RollPitchYaw_TFTLCDgraph reading Roll, Pitch, and Yaw Pitch Roll Github This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. Quaternion to yaw, pitch, and roll angles. It is also possible to input your own angles and hit the set button to update them. Estimate pose (yaw, roll, pitch) of a face using two extremely simple, efficient and accurate methods. # transform gyro. Yaw Pitch Roll Github.
From www.brightdevelopers.com
xyz_pitchyawroll bright developers Yaw Pitch Roll Github If (event.sensor.gettype () == sensor.type_rotation_vector) {. Public void onsensorchanged (sensorevent event) {. This repository provides two different methods to estimate the pose (rotation angles) of a detected human face. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from. It is also possible to input your own angles and hit the set. Yaw Pitch Roll Github.