Camera Calibration Intrinsic Matrix . in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. Currently, the function only supports planar. A collection of images with points whose 2d image coordinates and. They include information like focal length ( f x, f y) and optical centers ( c x, c y). intrinsic parameters are specific to a camera. in summary, a camera calibration algorithm has the following inputs and outputs. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Given the coordinates of a point in the world wrt the camera, we.
from www.semanticscholar.org
They include information like focal length ( f x, f y) and optical centers ( c x, c y). in summary, a camera calibration algorithm has the following inputs and outputs. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. A collection of images with points whose 2d image coordinates and. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Currently, the function only supports planar. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. Given the coordinates of a point in the world wrt the camera, we. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters.
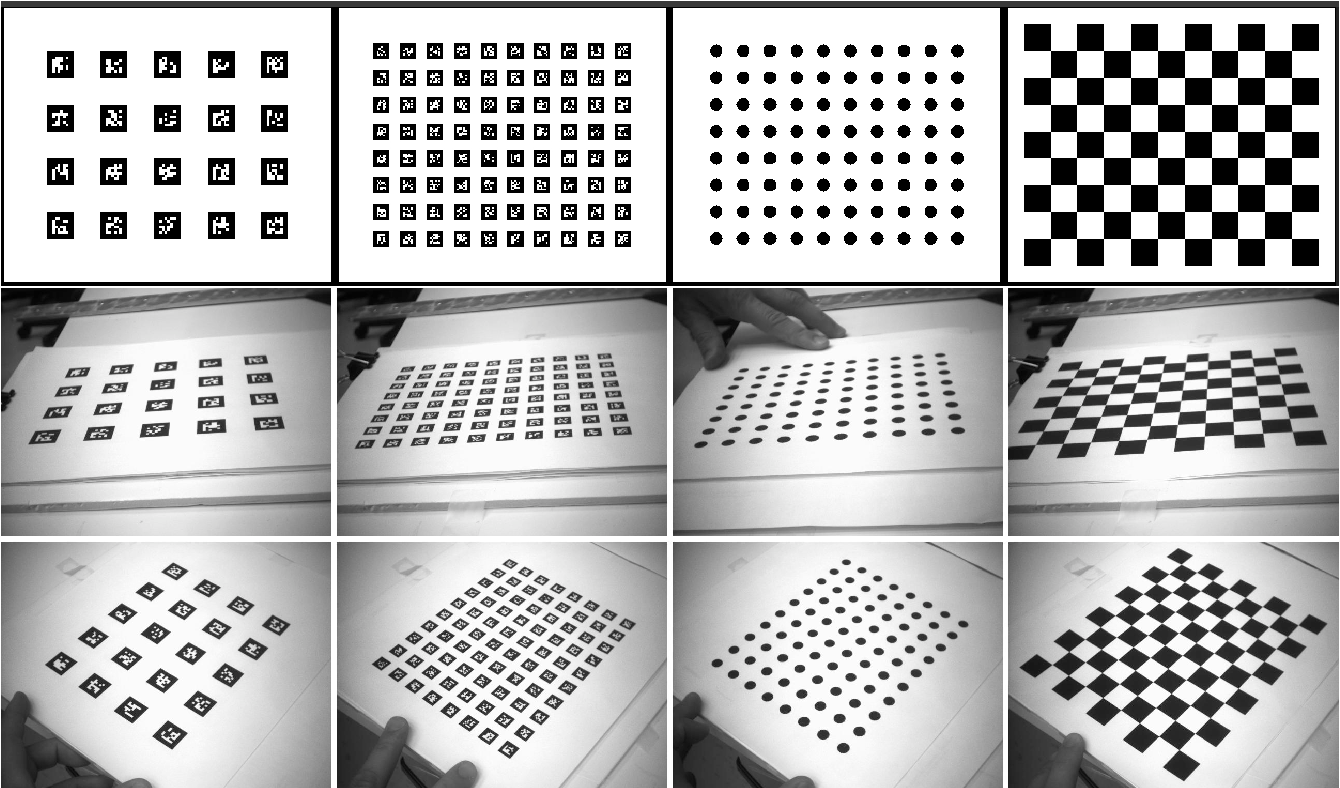
Figure 8 from Fully Automatic Camera Calibration Using SelfIdentifying
Camera Calibration Intrinsic Matrix Currently, the function only supports planar. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. A collection of images with points whose 2d image coordinates and. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. They include information like focal length ( f x, f y) and optical centers ( c x, c y). Currently, the function only supports planar. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. intrinsic parameters are specific to a camera. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. in summary, a camera calibration algorithm has the following inputs and outputs. Given the coordinates of a point in the world wrt the camera, we.
From www.slideserve.com
PPT Structure from Motion PowerPoint Presentation, free download ID Camera Calibration Intrinsic Matrix intrinsic parameters are specific to a camera. Currently, the function only supports planar. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the above. Camera Calibration Intrinsic Matrix.
From stackoverflow.com
opengl Getting camera calibration (fx, fy, cx, cy) from projection Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. They include information like focal length ( f x, f y) and optical centers ( c x, c y). Currently, the function only supports planar. Given the coordinates of a point in the world wrt the. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
Camera calibration. The camera viewing and projection matrices are Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. Currently, the function only supports planar. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic. Camera Calibration Intrinsic Matrix.
From www.mdpi.com
Sensors Free FullText MachineLearningInspired Workflow for Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. A collection of images with points whose 2d image coordinates and. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. in summary, a camera calibration algorithm has. Camera Calibration Intrinsic Matrix.
From www.slideserve.com
PPT Camera Calibration PowerPoint Presentation, free download ID Camera Calibration Intrinsic Matrix They include information like focal length ( f x, f y) and optical centers ( c x, c y). Given the coordinates of a point in the world wrt the camera, we. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. the above matrix. Camera Calibration Intrinsic Matrix.
From github.com
Camera intrinsic parameters corresponding to the Scene image? · Issue Camera Calibration Intrinsic Matrix the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. Currently, the function only supports planar. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera. Camera Calibration Intrinsic Matrix.
From www.miracleyoo.com
相机校准 相机标定 Intrinsic/Extrinsic Calibration详解 绝对Extrinsic矩阵测得实操 Event Camera Calibration Intrinsic Matrix in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Currently, the function only. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
System calibration to recognize intrinsic parameters and homography Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. Given the coordinates of a point in the world wrt the camera, we. in summary, a camera calibration algorithm has the following inputs and outputs. intrinsic parameters are specific to a camera. A collection of images with points whose 2d image coordinates. Camera Calibration Intrinsic Matrix.
From www.vrogue.co
Matlab Camera Calibration Intrinsic Matrix What Do Th vrogue.co Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. in summary, a camera calibration algorithm has the following inputs and outputs. They include information like focal length. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
Bumblebee2 camera intrinsic and extrinsic calibration using the Zhang Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. Currently, the function only supports planar. A collection of images with points whose 2d image coordinates and. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. in order to map the camera coordinates to pixel coordinates (to. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
Calibration of camera intrinsic parameters using rectangular flat Camera Calibration Intrinsic Matrix Currently, the function only supports planar. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Given the coordinates of a point in the world wrt the camera, we. in summary, a camera calibration algorithm has the following inputs and outputs.. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
System calibration to recognize intrinsic parameters and homography Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. Given the coordinates of a point in the world wrt the camera, we. in summary, a camera calibration algorithm has. Camera Calibration Intrinsic Matrix.
From github.com
GitHub Camera Calibration Intrinsic Matrix A collection of images with points whose 2d image coordinates and. intrinsic parameters are specific to a camera. They include information like focal length ( f x, f y) and optical centers ( c x, c y). Currently, the function only supports planar. in summary, a camera calibration algorithm has the following inputs and outputs. the intrinsic. Camera Calibration Intrinsic Matrix.
From towardsdatascience.com
Camera Extrinsic Matrix with Example in Python by Neeraj Krishna Camera Calibration Intrinsic Matrix the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Given the coordinates of a point in the world wrt the camera, we. They include information like focal length ( f x, f y) and optical centers ( c x, c y). A collection of images with points whose 2d image coordinates and. in summary, a. Camera Calibration Intrinsic Matrix.
From www.slideserve.com
PPT Camera Calibration from Planar Patterns PowerPoint Presentation Camera Calibration Intrinsic Matrix intrinsic parameters are specific to a camera. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. A collection of images with points whose 2d image coordinates and. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic. Camera Calibration Intrinsic Matrix.
From www.youtube.com
Camera Parameters and Calibration (W31) YouTube Camera Calibration Intrinsic Matrix Currently, the function only supports planar. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. They include information like focal length ( f x, f y) and optical centers ( c x, c y). Given the coordinates of a point in the world wrt the. Camera Calibration Intrinsic Matrix.
From www.youtube.com
Intrinsic and Extrinsic Matrices Camera Calibration YouTube Camera Calibration Intrinsic Matrix A collection of images with points whose 2d image coordinates and. They include information like focal length ( f x, f y) and optical centers ( c x, c y). intrinsic parameters are specific to a camera. Currently, the function only supports planar. in order to map the camera coordinates to pixel coordinates (to map virtual objects in. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
Intrinsics and extrinsics of cameras Literature often uses the [Rc Camera Calibration Intrinsic Matrix the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. in summary, a camera calibration algorithm has the following inputs and outputs. A collection of images with points whose 2d image coordinates and. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. intrinsic parameters are specific to a camera.. Camera Calibration Intrinsic Matrix.
From www.cc.gatech.edu
Computer Vision Project Camera Calibration Intrinsic Matrix Currently, the function only supports planar. in summary, a camera calibration algorithm has the following inputs and outputs. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the function estimates and returns an initial camera intrinsic matrix for the camera. Camera Calibration Intrinsic Matrix.
From mphy0026.readthedocs.io
5.5. Intrinsic camera parameters calibration — MPHY0026 documentation Camera Calibration Intrinsic Matrix Currently, the function only supports planar. Given the coordinates of a point in the world wrt the camera, we. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera. Camera Calibration Intrinsic Matrix.
From eikosim.com
Camera calibration principles and procedures EikoSim Camera Calibration Intrinsic Matrix Currently, the function only supports planar. Given the coordinates of a point in the world wrt the camera, we. A collection of images with points whose 2d image coordinates and. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. in summary, a camera calibration algorithm has the following inputs and outputs. . Camera Calibration Intrinsic Matrix.
From towardsdatascience.com
Camera Calibration with Example in Python by Neeraj Krishna Towards Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. intrinsic parameters are specific to a camera. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. They include information like focal length ( f x,. Camera Calibration Intrinsic Matrix.
From www.mathworks.com
Lidar and Camera Calibration MATLAB & Simulink Camera Calibration Intrinsic Matrix Currently, the function only supports planar. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. in summary, a camera calibration algorithm has the following inputs and outputs. intrinsic parameters are specific to a camera. in order to map. Camera Calibration Intrinsic Matrix.
From stackoverflow.com
Getting 2 values of focal length when finding Intrinsic camera matrix Camera Calibration Intrinsic Matrix in summary, a camera calibration algorithm has the following inputs and outputs. A collection of images with points whose 2d image coordinates and. Given the coordinates of a point in the world wrt the camera, we. the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. the intrinsic matrix transforms 3d camera. Camera Calibration Intrinsic Matrix.
From www.researchgate.net
67 questions with answers in CAMERA CALIBRATION Science topic Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. intrinsic parameters are specific to a camera. in summary, a camera calibration algorithm has the following inputs and outputs. They include information like focal length ( f x, f y) and optical centers ( c x, c y). in order to map the camera. Camera Calibration Intrinsic Matrix.
From www.slideserve.com
PPT Camera calibration PowerPoint Presentation, free download ID Camera Calibration Intrinsic Matrix the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. A collection of images with points whose 2d image coordinates and. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the above matrix is called the camera intrinsic. Camera Calibration Intrinsic Matrix.
From www.chegg.com
In this programming assignment, you are expected to Camera Calibration Intrinsic Matrix A collection of images with points whose 2d image coordinates and. intrinsic parameters are specific to a camera. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. Given the coordinates of a point in the world wrt the camera, we. . Camera Calibration Intrinsic Matrix.
From mphy0026.readthedocs.io
5.5. Intrinsic camera parameters calibration — MPHY0026 documentation Camera Calibration Intrinsic Matrix the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. They include information like focal length ( f x, f y) and optical centers ( c x, c y). the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. Given the coordinates of a point in the world wrt the camera, we.. Camera Calibration Intrinsic Matrix.
From www.vrogue.co
Matlab Camera Calibration Intrinsic Matrix What Do Th vrogue.co Camera Calibration Intrinsic Matrix intrinsic parameters are specific to a camera. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. A collection of images with points whose 2d image coordinates and. They include information like focal length ( f x, f y) and optical centers ( c x, c y). in summary, a camera calibration algorithm has the. Camera Calibration Intrinsic Matrix.
From www.slideserve.com
PPT Structure from Motion PowerPoint Presentation, free download ID Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. Currently, the function only supports planar. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the function estimates and returns an initial camera intrinsic matrix for the. Camera Calibration Intrinsic Matrix.
From github.com
GitHub Chrislai502/Homographic_Lidar_Camera_Calibration LidarCamera Camera Calibration Intrinsic Matrix Given the coordinates of a point in the world wrt the camera, we. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. in summary, a camera calibration algorithm has the following inputs and outputs. They include information like focal length ( f x, f y) and optical centers ( c x, c y).. Camera Calibration Intrinsic Matrix.
From www.vrogue.co
Solved Opencv Camera Calibration In Python Without Using Cv2 Vrogue Camera Calibration Intrinsic Matrix the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image coordinates. They include information like focal length ( f x, f y) and optical centers ( c x, c y). A collection of images with points whose 2d image coordinates and. intrinsic. Camera Calibration Intrinsic Matrix.
From www.slideserve.com
PPT Camera terminology PowerPoint Presentation, free download ID Camera Calibration Intrinsic Matrix the function estimates and returns an initial camera intrinsic matrix for the camera calibration process. Given the coordinates of a point in the world wrt the camera, we. Currently, the function only supports planar. in summary, a camera calibration algorithm has the following inputs and outputs. the intrinsic matrix transforms 3d camera cooordinates to 2d homogeneous image. Camera Calibration Intrinsic Matrix.
From www.semanticscholar.org
Figure 8 from Fully Automatic Camera Calibration Using SelfIdentifying Camera Calibration Intrinsic Matrix in summary, a camera calibration algorithm has the following inputs and outputs. Given the coordinates of a point in the world wrt the camera, we. in order to map the camera coordinates to pixel coordinates (to map virtual objects in the real world), we need to find the intrinsic camera parameters. the intrinsic matrix transforms 3d camera. Camera Calibration Intrinsic Matrix.
From gachiemchiep.github.io
Camera calibration Camera Calibration Intrinsic Matrix A collection of images with points whose 2d image coordinates and. the above matrix is called the camera intrinsic matrix, and it’s represented by 𝜅. They include information like focal length ( f x, f y) and optical centers ( c x, c y). Currently, the function only supports planar. intrinsic parameters are specific to a camera. . Camera Calibration Intrinsic Matrix.