Spline Trajectory . first we present a method for cubic spline optimization; Move the manipulator arm from some initial position {ta} to. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The trajectories we generate are applicable to differentially flat systems, a broad.
from www.semanticscholar.org
The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and.
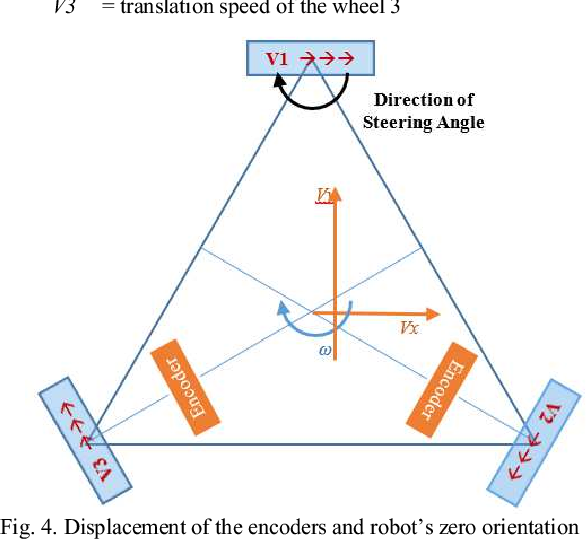
Figure 4 from Spline Trajectory for Three Wheel Mobile Robot Swerve
Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move the manipulator arm from some initial position {ta} to. The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. first we present a method for cubic spline optimization;
From www.researchgate.net
Procedure for optimization using Bspline trajectory Download Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. in this paper, methods based. Spline Trajectory.
From www.researchgate.net
Generated waypoints, optimal trajectory and cubic spline trajectory in Spline Trajectory Move the manipulator arm from some initial position {ta} to. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector. Spline Trajectory.
From www.researchgate.net
Spline trajectory of time point projections (points 138) on the Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. first we present a method for cubic spline optimization; Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop. Spline Trajectory.
From www.researchgate.net
Components of the spline used for trajectory curve fitting Download Spline Trajectory Move the manipulator arm from some initial position {ta} to. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we. Spline Trajectory.
From www.researchgate.net
1. Example trajectory with quintic spline curves. Download Scientific Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method. Spline Trajectory.
From www.vrogue.co
Generate B Spline Trajectory Matlab Simulink Mathwork vrogue.co Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. first we present a method for cubic spline optimization; The trajectories we generate are applicable to differentially flat systems, a broad. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move. Spline Trajectory.
From www.researchgate.net
Representation of the Cubic Spline Trajectory with the horizontal Spline Trajectory in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. first we present a method for cubic spline optimization; in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory. Spline Trajectory.
From www.semanticscholar.org
Figure 4 from Spline Trajectory for Three Wheel Mobile Robot Swerve Spline Trajectory in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The trajectories we generate are applicable to differentially flat systems, a broad. Move the manipulator arm from some. Spline Trajectory.
From forums.autodesk.com
Reveal Spline Trajectory Autodesk Community Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. Move the manipulator arm from some initial position {ta} to. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially flat systems, a broad. first we. Spline Trajectory.
From www.researchgate.net
Trajectory generation using uniform Bspline. The smoothness of the Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially. Spline Trajectory.
From www.semanticscholar.org
Figure 13.1 from Chapter 13 A SEMIINFINITE OPTIMIZATION APPROACH TO Spline Trajectory Move the manipulator arm from some initial position {ta} to. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based. Spline Trajectory.
From www.researchgate.net
Examples of leg trajectory splines generated at different gait Spline Trajectory Move the manipulator arm from some initial position {ta} to. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially flat systems, a broad. first we present a method for cubic spline optimization; The function outputs the trajectory positions (q), velocity. Spline Trajectory.
From www.youtube.com
Spline mesh missile trajectory tutorial DRAW SPLINE MESH part 2 Unreal Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. first we present a method for cubic spline optimization; The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. Move the manipulator. Spline Trajectory.
From www.youtube.com
Spline mesh missile trajectory tutorial Overview part 0 Unreal engine Spline Trajectory first we present a method for cubic spline optimization; in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. Move the manipulator arm from some initial position {ta} to. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The trajectories we. Spline Trajectory.
From www.researchgate.net
Bspline trajectory (n = 7, p = 5) s i (t) (), control points (μ j , P Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of. Spline Trajectory.
From www.researchgate.net
Spline trajectory of time point projections (points 138) on the Spline Trajectory Move the manipulator arm from some initial position {ta} to. first we present a method for cubic spline optimization; in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in this paper, methods based on various. Spline Trajectory.
From www.researchgate.net
Diagram of the spline trajectory of a swing leg with the addition of an Spline Trajectory in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; Move the manipulator arm from some initial position {ta} to. The trajectories we generate are applicable to differentially flat systems, a broad. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd),. Spline Trajectory.
From forums.autodesk.com
Reveal Spline Trajectory Autodesk Community Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially flat systems, a broad. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move the manipulator arm from some initial position {ta} to. . Spline Trajectory.
From www.researchgate.net
The trajectory curve of different Bspline curve motion laws in the Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. first we present a method for cubic spline optimization; in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move the manipulator arm from some. Spline Trajectory.
From www.semanticscholar.org
Figure 2 from Splinebased Trajectory Optimization for Autonomous Spline Trajectory first we present a method for cubic spline optimization; The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move the manipulator arm from some initial position {ta} to. in this paper, methods based on various. Spline Trajectory.
From hxeensnsi.blob.core.windows.net
What Are Spline Curves In Computer Graphics at Melissa Gatton blog Spline Trajectory first we present a method for cubic spline optimization; The trajectories we generate are applicable to differentially flat systems, a broad. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd),. Spline Trajectory.
From www.researchgate.net
A trajectory (blue line) is represented by a Bspline (k = 4), bounded Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The trajectories we generate are applicable to differentially. Spline Trajectory.
From www.semanticscholar.org
Figure 1 from SplineBased Trajectory Generation for CNC Machines Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic. Spline Trajectory.
From www.researchgate.net
Components of the spline used for trajectory curve fitting. Download Spline Trajectory first we present a method for cubic spline optimization; in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The trajectories we generate are. Spline Trajectory.
From www.researchgate.net
9 BSpline trajectory case Estimation of the unknowns F i for i = x Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The trajectories we generate are applicable to differentially flat systems, a broad. Move the manipulator arm from some initial position {ta} to. first we present a method. Spline Trajectory.
From www.researchgate.net
Flight test result for a spline based trajectory Download Scientific Spline Trajectory in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory. Spline Trajectory.
From www.semanticscholar.org
Figure 10 from Spline Trajectory for Three Wheel Mobile Robot Swerve Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; Move the manipulator arm from some initial position {ta} to. The function outputs. Spline Trajectory.
From docs.hello-robot.com
Splined Trajectories Stretch Documentation Spline Trajectory The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially flat systems, a broad. in particular, we develop a method for constructing trajectories with the curvature. Spline Trajectory.
From www.researchgate.net
Worst case BSpline collision scenario with degree 3. The trajectory is Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. first we present a method for cubic spline optimization; in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. Move. Spline Trajectory.
From www.researchgate.net
Trajectory generated by Bspline curve Download Scientific Diagram Spline Trajectory The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. Move the manipulator arm from some initial position {ta} to. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. . Spline Trajectory.
From www.researchgate.net
Fitting a cubic spline on a trajectory Download Scientific Diagram Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The trajectories we generate are applicable to differentially flat systems, a broad. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. first we present a method for cubic spline optimization; Move. Spline Trajectory.
From www.researchgate.net
Representation of the Cubic Spline Trajectory with the horizontal Spline Trajectory in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. first we present a method for cubic. Spline Trajectory.
From www.researchgate.net
Point to point spline trajectory Download Scientific Diagram Spline Trajectory Move the manipulator arm from some initial position {ta} to. The trajectories we generate are applicable to differentially flat systems, a broad. in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. in particular, we develop a method for constructing trajectories with the curvature satisfying given upper bound. The. Spline Trajectory.
From forums.autodesk.com
Reveal Spline Trajectory Autodesk Community Spline Trajectory in this paper, methods based on various spline techniques for planning and fast modifications of a trajectory for robot. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. first we present a method for cubic spline optimization; The trajectories we generate are applicable to differentially flat systems, a broad. Move the manipulator. Spline Trajectory.
From www.researchgate.net
Cubic spline trajectory for path planning use case for a Kuka LWR next Spline Trajectory Move the manipulator arm from some initial position {ta} to. The function outputs the trajectory positions (q), velocity (qd), acceleration (qdd), time vector (tvec), and. The trajectories we generate are applicable to differentially flat systems, a broad. first we present a method for cubic spline optimization; in particular, we develop a method for constructing trajectories with the curvature. Spline Trajectory.