Define Pitch Yaw And Roll In Robotics . See illustrations of yaw, pitch, and roll rotations. Explore the different types of joints, mechanisms, and. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. They are commonly used to. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. To envision pitch, think of the nose of an airplane pointing downward or upward. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout.
from www.chegg.com
Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. They are commonly used to. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. See illustrations of yaw, pitch, and roll rotations. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. To envision pitch, think of the nose of an airplane pointing downward or upward. Explore the different types of joints, mechanisms, and. A pitch moment attempts to cause a system to rotate about its y axis, from front to back.
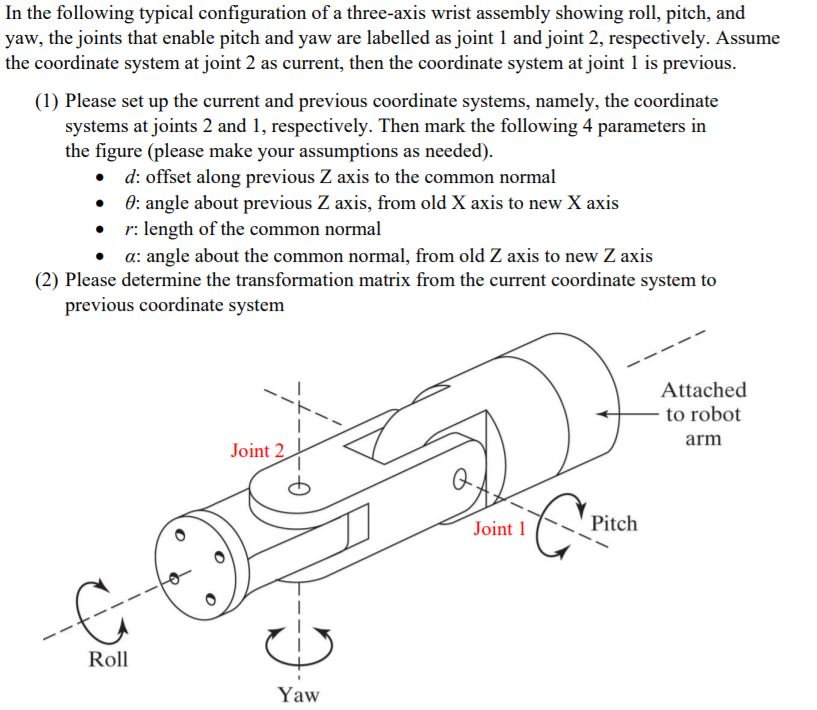
In the following typical configuration of a
Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. Explore the different types of joints, mechanisms, and. To envision pitch, think of the nose of an airplane pointing downward or upward. They are commonly used to. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter. Download Scientific Define Pitch Yaw And Roll In Robotics They are commonly used to. Explore the different types of joints, mechanisms, and. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. • a reprogrammable, multifunctional manipulator designed to move material,. Define Pitch Yaw And Roll In Robotics.
From www.machinedesign.com
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design Define Pitch Yaw And Roll In Robotics Explore the different types of joints, mechanisms, and. See illustrations of yaw, pitch, and roll rotations. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. To envision pitch, think of the nose of an airplane. Define Pitch Yaw And Roll In Robotics.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Define Pitch Yaw And Roll In Robotics A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. They are commonly used to. Explore the different types of joints, mechanisms, and. To envision pitch, think of the nose of an airplane pointing downward or. Define Pitch Yaw And Roll In Robotics.
From www.youtube.com
Yaw, Pitch and Roll What's it? YouTube Define Pitch Yaw And Roll In Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. To envision pitch, think of the nose of an airplane pointing downward or upward. They are commonly used to. See illustrations of yaw, pitch, and roll rotations. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn the basics. Define Pitch Yaw And Roll In Robotics.
From www.mecharithm.com
Other Explicit Representation for the Orientation in Robotics Roll Define Pitch Yaw And Roll In Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations of yaw, pitch, and roll rotations. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its. Define Pitch Yaw And Roll In Robotics.
From www.youtube.com
Roll, pitch, and yaw animation robotics gripper YouTube Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as. Define Pitch Yaw And Roll In Robotics.
From epicflightacademy.com
Yaw in Aircraft Essential Aviation Knowledge for Pilots Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. To envision pitch, think of the nose of an airplane pointing downward or upward. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. They are commonly used to. Learn the basics. Define Pitch Yaw And Roll In Robotics.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Define Pitch Yaw And Roll In Robotics Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. See illustrations of yaw, pitch, and roll rotations. Learn how to define and. Define Pitch Yaw And Roll In Robotics.
From www.micoope.com.gt
Motion Basics How To Define Roll, Pitch, And Yaw For, 43 OFF Define Pitch Yaw And Roll In Robotics Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. See illustrations of yaw, pitch, and roll rotations. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
1 Roll, yaw and pitch motion of a moving vessel. The same motions apply Define Pitch Yaw And Roll In Robotics • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Explore the different types of joints, mechanisms, and. To envision pitch, think of the nose of an airplane pointing downward or upward. See illustrations of yaw, pitch, and roll rotations. Objects can move on x, y, or z axes and change orientation among these axes through. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Definition of pitch, roll, and yaw degrees of freedom. Download Define Pitch Yaw And Roll In Robotics Explore the different types of joints, mechanisms, and. To envision pitch, think of the nose of an airplane pointing downward or upward. See illustrations of yaw, pitch, and roll rotations. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn the basics of robot kinematics, the study of the relationship between a robot's. Define Pitch Yaw And Roll In Robotics.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Define Pitch Yaw And Roll In Robotics A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. To envision pitch, think of the nose of an. Define Pitch Yaw And Roll In Robotics.
From www.youtube.com
What Are the Three Axes of Flight? Yaw, Pitch & Roll. Helicopter Define Pitch Yaw And Roll In Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. To envision pitch, think of the nose of an airplane pointing downward or upward. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. Objects can move on x, y, or z axes and. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. They are commonly used to. Explore the different types of joints, mechanisms, and. • a reprogrammable, multifunctional manipulator designed. Define Pitch Yaw And Roll In Robotics.
From www.tkk-air.co.jp
Inertial Sensors Define Pitch Yaw And Roll In Robotics Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. See illustrations of yaw, pitch, and. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Orientation of the head in terms of pitch, roll, and yaw movements Define Pitch Yaw And Roll In Robotics • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Attitude control mechanism of roll, pitch, and yaw in the NUS Define Pitch Yaw And Roll In Robotics A pitch moment attempts to cause a system to rotate about its y axis, from front to back. See illustrations of yaw, pitch, and roll rotations. They are commonly used to. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. To envision pitch, think of the nose of an. Define Pitch Yaw And Roll In Robotics.
From highsierrapilots.club
Your Lake Tahoe, Minden, Reno Discovery Flight High Sierra Pilots Define Pitch Yaw And Roll In Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. See illustrations of yaw, pitch, and roll rotations. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. A pitch. Define Pitch Yaw And Roll In Robotics.
From www.simracingstudio.com
Motion 101 Roll, Pitch, Yaw, Sway, Surge, Heave and Traction Loss Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Objects can. Define Pitch Yaw And Roll In Robotics.
From www.youtube.com
RollPitchYaw Angles in Robotics Fundamentals of Robotics Lesson Define Pitch Yaw And Roll In Robotics A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. • a reprogrammable, multifunctional manipulator designed to move material,. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Representations of angular orientations (roll, yaw, and pitch). The Define Pitch Yaw And Roll In Robotics • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. See illustrations of yaw, pitch, and roll rotations. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. They are commonly used to. Explore the different types of joints, mechanisms, and. Objects can move on x, y, or. Define Pitch Yaw And Roll In Robotics.
From www.fuyumotion.com
Motion basics How to define roll, pitch, and yaw for linear systems Define Pitch Yaw And Roll In Robotics Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. Explore the different types of joints, mechanisms, and. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. See illustrations. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Illustration of ship motion, showing roll, pitch, and yaw, the three Define Pitch Yaw And Roll In Robotics Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. • a reprogrammable, multifunctional manipulator designed to move material,. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Define Pitch Yaw And Roll In Robotics They are commonly used to. See illustrations of yaw, pitch, and roll rotations. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. Explore the different types of joints, mechanisms, and. Learn how to define and counteract. Define Pitch Yaw And Roll In Robotics.
From engineering.stackexchange.com
mechanical engineering Calculating pitch, yaw, and roll from mag, acc Define Pitch Yaw And Roll In Robotics Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Explore the different types of joints, mechanisms, and. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. To envision pitch, think. Define Pitch Yaw And Roll In Robotics.
From www.alamy.com
Roll Pitch Yaw Stock Photo Alamy Define Pitch Yaw And Roll In Robotics Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. To envision pitch, think of the nose of an airplane. Define Pitch Yaw And Roll In Robotics.
From robo.sntiitk.in
Beginner's Guide to IMU Robotics Club Define Pitch Yaw And Roll In Robotics Explore the different types of joints, mechanisms, and. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn the basics of robot. Define Pitch Yaw And Roll In Robotics.
From www.chegg.com
In the following typical configuration of a Define Pitch Yaw And Roll In Robotics • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. To envision pitch, think of the nose of an airplane pointing downward or upward. A pitch moment attempts to cause a system to rotate about its. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. Explore the different types of joints, mechanisms, and. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. A pitch moment attempts to cause a system to rotate about its y axis,. Define Pitch Yaw And Roll In Robotics.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Define Pitch Yaw And Roll In Robotics Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. See illustrations of yaw, pitch, and roll rotations. Explore. Define Pitch Yaw And Roll In Robotics.
From wiki.dfrobot.com
How_to_Use_a_ThreeAxis_Accelerometer_for_Tilt_SensingDFRobot Define Pitch Yaw And Roll In Robotics Explore the different types of joints, mechanisms, and. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. They are commonly used to. Learn how to define and counteract roll, pitch, and. Define Pitch Yaw And Roll In Robotics.
From www.roboticsunveiled.com
Robotics Part 11 Representations of Orientation Euler Angles ZYX Define Pitch Yaw And Roll In Robotics To envision pitch, think of the nose of an airplane pointing downward or upward. Objects can move on x, y, or z axes and change orientation among these axes through rotations referred to as yaw, pitch, and roll, which comes to a total of six different ways. Explore the different types of joints, mechanisms, and. Learn the basics of robot. Define Pitch Yaw And Roll In Robotics.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Define Pitch Yaw And Roll In Robotics To envision pitch, think of the nose of an airplane pointing downward or upward. Explore the different types of joints, mechanisms, and. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and its spatial layout. Objects can. Define Pitch Yaw And Roll In Robotics.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Define Pitch Yaw And Roll In Robotics See illustrations of yaw, pitch, and roll rotations. • a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. They are commonly used to. Learn the basics of robot kinematics, the study of the relationship between a robot's joint coordinates and. Define Pitch Yaw And Roll In Robotics.
From journals.sagepub.com
Yaw control torque generation for a hovering robotic hummingbird Ali Define Pitch Yaw And Roll In Robotics Explore the different types of joints, mechanisms, and. See illustrations of yaw, pitch, and roll rotations. A pitch moment attempts to cause a system to rotate about its y axis, from front to back. They are commonly used to. Learn how to define and counteract roll, pitch, and yaw moments in linear guides and systems. Learn the basics of robot. Define Pitch Yaw And Roll In Robotics.