Imu Yaw Pitch Roll . In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an imu takes some advanced math. Fortunately, there are a few algorithms for doing it. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Below as a picture to illustrate the definition. In a previous project i. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. I am using the raw.
from www.slideserve.com
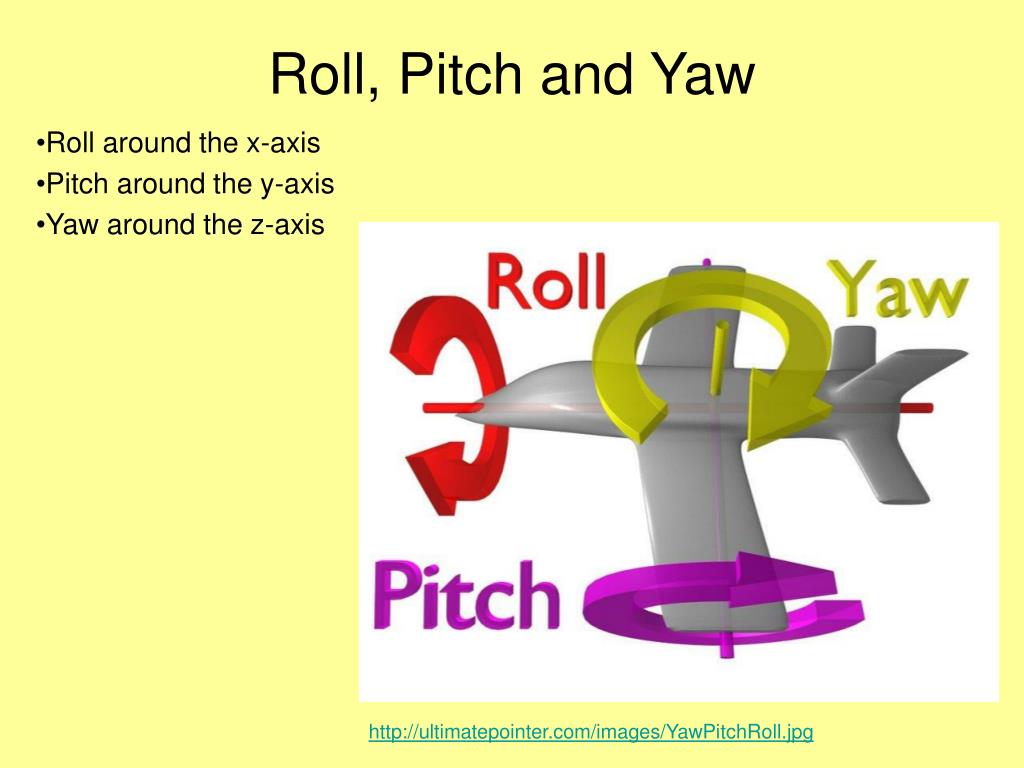
Fortunately, there are a few algorithms for doing it. In a previous project i. Below as a picture to illustrate the definition. Determining orientation from an imu takes some advanced math. Pitch, roll and yaw are defined as the rotation around x, y and z axis. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. In 2010, sebastian madgwick developed and published a more efficient. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. I am using the raw. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information.
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899
Imu Yaw Pitch Roll Fortunately, there are a few algorithms for doing it. Below as a picture to illustrate the definition. Determining orientation from an imu takes some advanced math. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. I am using the raw. In 2010, sebastian madgwick developed and published a more efficient. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Fortunately, there are a few algorithms for doing it. In a previous project i.
From www.researchgate.net
Acceleration and roll/pitch/yaw angle is obtained from the IMU sensor... Download Scientific Imu Yaw Pitch Roll In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Determining orientation from an imu takes some advanced math. In a previous project i. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated. Imu Yaw Pitch Roll.
From www.youtube.com
Free IMU yaw pitch roll drift YouTube Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i. I am using the raw. In 2010, sebastian madgwick developed and published a more efficient. Below as a picture to illustrate the definition. I need help understanding the difference from y/p/r rate and the data that i can get from. Imu Yaw Pitch Roll.
From atadiat.com
Towards understanding IMU Basics of Accelerometer and Gyroscope Sensors and How to Compute Imu Yaw Pitch Roll In 2010, sebastian madgwick developed and published a more efficient. Below as a picture to illustrate the definition. Determining orientation from an imu takes some advanced math. In a previous project i. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity. Imu Yaw Pitch Roll.
From www.researchgate.net
Trend of the Roll (a), Pitch (b), and Yaw (c) angles measured from the... Download Scientific Imu Yaw Pitch Roll Determining orientation from an imu takes some advanced math. Below as a picture to illustrate the definition. In a previous project i. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the.. Imu Yaw Pitch Roll.
From robo.sntiitk.in
Beginner's Guide to IMU Robotics Club Imu Yaw Pitch Roll In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Below as a picture to illustrate the definition. This document describes how the orientation of the imu in terms of yaw,pitch,. Imu Yaw Pitch Roll.
From www.youtube.com
IMU To Capture Roll+Pitch+Yaw YouTube Imu Yaw Pitch Roll I am using the raw. Pitch, roll and yaw are defined as the rotation around x, y and z axis. In 2010, sebastian madgwick developed and published a more efficient. Below as a picture to illustrate the definition. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by. Imu Yaw Pitch Roll.
From www.hellmaker.kr
자이로센서 roll, pitch, yaw 데이터 처리 구조 1 > 메이커 스토리 Hell Maker Imu Yaw Pitch Roll I am using the raw. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an imu takes some advanced math. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Below as a picture to illustrate the definition.. Imu Yaw Pitch Roll.
From www.alamyimages.fr
Pitch Roll Yaw Photo Stock Alamy Imu Yaw Pitch Roll I am using the raw. In a previous project i. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Pitch, roll and yaw are defined as the rotation around x,. Imu Yaw Pitch Roll.
From www.youtube.com
IMU Madgwick filter pitch effect on roll and yaw YouTube Imu Yaw Pitch Roll Below as a picture to illustrate the definition. I am using the raw. Determining orientation from an imu takes some advanced math. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and published a more efficient.. Imu Yaw Pitch Roll.
From ouo0725.github.io
Inertial Measurement Unit (IMU) MCU course Imu Yaw Pitch Roll I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. Below as a picture to illustrate the definition. In 2010, sebastian madgwick developed and published a more efficient. Determining orientation from an imu takes some advanced math. This document describes how the orientation of the imu in terms of yaw,pitch, and. Imu Yaw Pitch Roll.
From www.youtube.com
Arduino IMU Roll, Pitch, Yaw Data shorts YouTube Imu Yaw Pitch Roll In a previous project i. In 2010, sebastian madgwick developed and published a more efficient. I am using the raw. Determining orientation from an imu takes some advanced math. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. I need. Imu Yaw Pitch Roll.
From www.researchgate.net
Exemplary sequence of roll, pitch and yaw angle measurements using an... Download Scientific Imu Yaw Pitch Roll Fortunately, there are a few algorithms for doing it. Determining orientation from an imu takes some advanced math. Below as a picture to illustrate the definition. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and. Imu Yaw Pitch Roll.
From www.vrogue.co
How To Capture Roll Pitch And Yaw Data Using Raspberr vrogue.co Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i. Below as a picture to illustrate the definition. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. I am using. Imu Yaw Pitch Roll.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Addison Imu Yaw Pitch Roll In a previous project i. Fortunately, there are a few algorithms for doing it. Below as a picture to illustrate the definition. I am using the raw. Determining orientation from an imu takes some advanced math. In 2010, sebastian madgwick developed and published a more efficient. Pitch, roll and yaw are defined as the rotation around x, y and z. Imu Yaw Pitch Roll.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Imu Yaw Pitch Roll Determining orientation from an imu takes some advanced math. In a previous project i. In 2010, sebastian madgwick developed and published a more efficient. Pitch, roll and yaw are defined as the rotation around x, y and z axis. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle. Imu Yaw Pitch Roll.
From github.com
GitHub izzetakkus/IMU_Kalman_Filter Roll Pitch Yaw estimation by designing a kalman filter Imu Yaw Pitch Roll I am using the raw. Below as a picture to illustrate the definition. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Determining orientation from an imu takes some advanced math. I need help understanding the difference from y/p/r rate. Imu Yaw Pitch Roll.
From www.researchgate.net
(PDF) Programming Of Remote Surveillance Robot And Odometry Sensor Calibration Protocol For CMR's Imu Yaw Pitch Roll Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and published a more efficient. I am using the raw. In a previous project i. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an imu takes some advanced. Imu Yaw Pitch Roll.
From www.satloc.com
Falcon & Falcon Pro the Next Generation of Guidance Satloc Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Fortunately, there are a few algorithms for doing it. Determining orientation from an imu takes some. Imu Yaw Pitch Roll.
From www.cnblogs.com
姿态角yaw、pitch、roll区分 azureology 博客园 Imu Yaw Pitch Roll I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. In a previous project i. Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide. Imu Yaw Pitch Roll.
From automaticaddison.com
How to Capture Roll, Pitch, and Yaw Data Using Raspberry Pi and Arduino Automatic Addison Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and published a more efficient. Below as a picture to illustrate the definition. In a previous project i. In imu applications, the kalman filter can be used to fuse accelerometer and. Imu Yaw Pitch Roll.
From bluelemonlabs.blogspot.com
Creative Electronic! Arduino IMU Pitch & Roll from an ADXL345 Imu Yaw Pitch Roll Determining orientation from an imu takes some advanced math. Below as a picture to illustrate the definition. Fortunately, there are a few algorithms for doing it. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Pitch, roll and yaw are defined as the rotation around x,. Imu Yaw Pitch Roll.
From velog.io
Rotation Yaw, Pitch, Roll Imu Yaw Pitch Roll This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and. Imu Yaw Pitch Roll.
From www.youtube.com
ROS robot orientation with IMU Roll/pitch/yaw approach YouTube Imu Yaw Pitch Roll I am using the raw. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an imu takes some advanced math. Pitch, roll and yaw are defined as the rotation around x, y and z axis. I need help understanding the difference from y/p/r. Imu Yaw Pitch Roll.
From www.researchgate.net
Comparison of (a) roll, (b) pitch and (c) yaw of IMU and filtered Vision Download Scientific Imu Yaw Pitch Roll Below as a picture to illustrate the definition. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information.. Imu Yaw Pitch Roll.
From www.alibaba.com
Witmotion Wt901cttl Imu Roll Pitch Yaw Acceleration + Gyroscope + Angle + Field Output Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i. Determining orientation from an imu takes some advanced math. Fortunately, there are a few algorithms for doing it. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by. Imu Yaw Pitch Roll.
From www.researchgate.net
The roll, pitch and yaw attitude differences between GNSS/IMUP40 (our... Download Scientific Imu Yaw Pitch Roll Determining orientation from an imu takes some advanced math. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. I am using the raw. In 2010, sebastian madgwick developed and published a more efficient. I need help understanding the difference from. Imu Yaw Pitch Roll.
From www.researchgate.net
15 Orientation feedback from IMU with Yaw/heading (top plot), roll... Download Scientific Diagram Imu Yaw Pitch Roll In 2010, sebastian madgwick developed and published a more efficient. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. I am using the raw. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. Determining orientation from. Imu Yaw Pitch Roll.
From www.researchgate.net
The IMU that is mounted at the back of the user’s head outputs... Download Scientific Diagram Imu Yaw Pitch Roll Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i. I am using the raw. In 2010, sebastian madgwick developed and published a more efficient. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. Determining orientation from an imu takes. Imu Yaw Pitch Roll.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Imu Yaw Pitch Roll I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Pitch, roll. Imu Yaw Pitch Roll.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Imu Yaw Pitch Roll In 2010, sebastian madgwick developed and published a more efficient. In a previous project i. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. I need help understanding the difference from. Imu Yaw Pitch Roll.
From www.pinterest.com
Axis rotations (pitch, yaw and roll) and translation specified by a... Download Scientific Imu Yaw Pitch Roll Below as a picture to illustrate the definition. Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and published a more efficient. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and velocity information. Determining orientation from an. Imu Yaw Pitch Roll.
From github.com
GitHub nopnop2002/espidfbmi160 A demo showing the pose of the bmi160 6DoF IMU sensor in 3D Imu Yaw Pitch Roll I am using the raw. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Below as a picture to illustrate the definition. In imu applications, the kalman filter can be used. Imu Yaw Pitch Roll.
From www.youtube.com
Yaw, Pitch and Roll What's it? YouTube Imu Yaw Pitch Roll Below as a picture to illustrate the definition. In 2010, sebastian madgwick developed and published a more efficient. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an. Imu Yaw Pitch Roll.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Imu Yaw Pitch Roll In a previous project i. I need help understanding the difference from y/p/r rate and the data that i can get from a gyroscope. Determining orientation from an imu takes some advanced math. In imu applications, the kalman filter can be used to fuse accelerometer and gyroscope data to provide more accurate attitude angle (pitch, yaw and roll angle) and. Imu Yaw Pitch Roll.
From www.tkk-air.co.jp
Inertial Sensors Imu Yaw Pitch Roll In a previous project i. Below as a picture to illustrate the definition. This document describes how the orientation of the imu in terms of yaw,pitch, and roll is calculated from the information provided by the. Determining orientation from an imu takes some advanced math. Fortunately, there are a few algorithms for doing it. In 2010, sebastian madgwick developed and. Imu Yaw Pitch Roll.