Matlab Simulink Lqr . this method allows you to find the control gain that results in the optimal balance between system errors and control effort. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. design an lqr servo controller in simulink. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. Assuming all the states are known we can design an optimal linear. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the.
from www.youtube.com
in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. design an lqr servo controller in simulink. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. Assuming all the states are known we can design an optimal linear. this method allows you to find the control gain that results in the optimal balance between system errors and control effort.
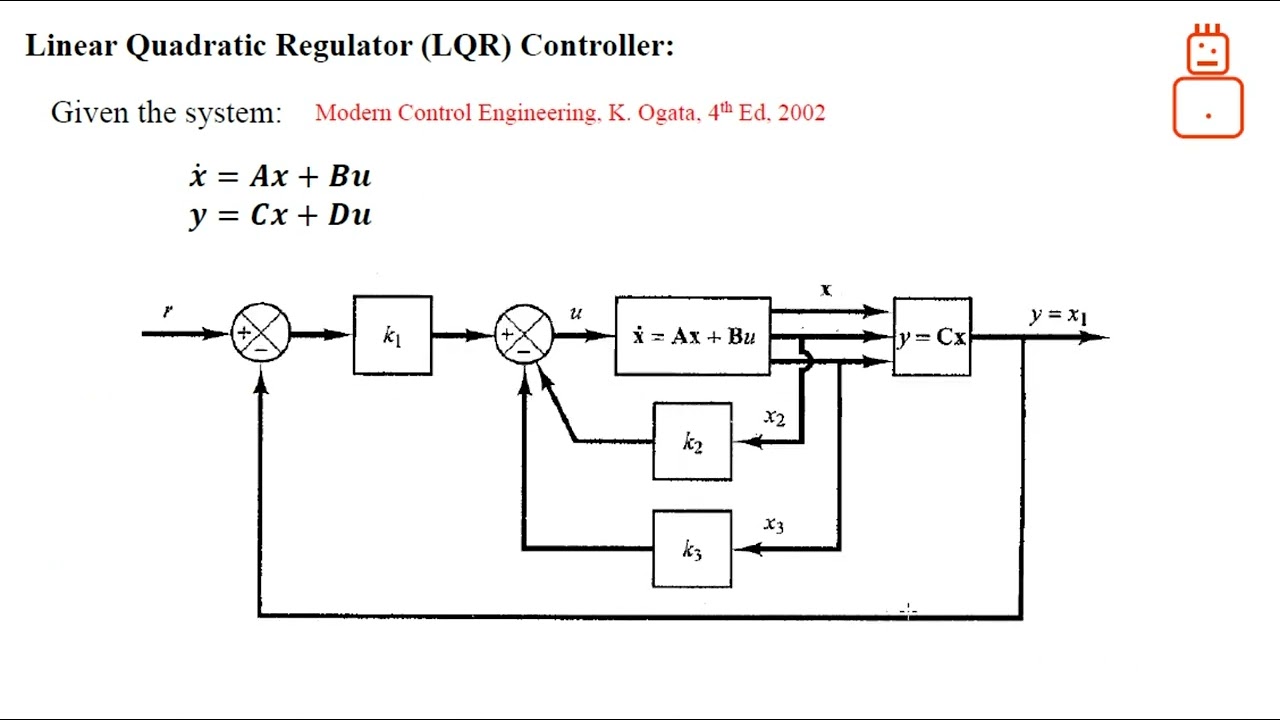
LQR controller for tracking rather than just regulating! An example in
Matlab Simulink Lqr in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all the states are known we can design an optimal linear.
From blog.csdn.net
LQR控制算法及matlab/simulink仿真CSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all the states are known we. Matlab Simulink Lqr.
From blog.51cto.com
matlab simulink 直线一级倒立摆控制方法研究 状态观测_51CTO博客_直线倒立摆lqr控制simulink仿真 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. design an lqr servo controller in simulink. Assuming all the states are known we can design an optimal linear. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. in this control engineering and control theory tutorial, we. Matlab Simulink Lqr.
From www.researchgate.net
7 Simulink model of system with LQR controller with and without sensor Matlab Simulink Lqr in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. design an lqr servo controller in simulink. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. design an lqr servo controller in simulink. this method allows you to find the control gain that results in the. Matlab Simulink Lqr.
From www.youtube.com
Design LQR in MatLab YouTube Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all the states are known we can design an optimal linear. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all the states are known we can design an optimal linear. i defined. Matlab Simulink Lqr.
From blog.csdn.net
自动驾驶控制基于运动学模型的LQR算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的lqr横向控制_lqr 运动学 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in.. Matlab Simulink Lqr.
From blog.csdn.net
自动驾驶控制基于运动学模型的LQR算法路径跟踪仿真 matlab和simulink联合仿真,运动学模型实现的lqr横向控制_lqr 运动学 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. Assuming all the states are known we can design an optimal linear. this method allows you. Matlab Simulink Lqr.
From blog.csdn.net
matlab simulink 一阶倒立摆LQR控制_一阶倒立摆simulinkCSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. in. Matlab Simulink Lqr.
From www.researchgate.net
How to design a LQR Controller in simulink? Matlab Simulink Lqr i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. The following figure shows a simulink ® block diagram shows. Matlab Simulink Lqr.
From electronics.stackexchange.com
control Implementing quadratic linear regulator (lqr) in simulink Matlab Simulink Lqr i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. The following figure shows a simulink ® block diagram shows. Matlab Simulink Lqr.
From blog.csdn.net
LQR 控制学习LQR控制 MATLAB官方教程LQR 控制器_状态空间系统Matlab/Simulink建模分析CSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. design an lqr servo controller in simulink. Assuming all the states are known we can design an optimal linear. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. this. Matlab Simulink Lqr.
From zhuanlan.zhihu.com
使用模糊逻辑/PID/LQR FSF 稳定倒立摆研究(Matlab&Simulink实现) 知乎 Matlab Simulink Lqr Assuming all the states are known we can design an optimal linear. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control gain that results in the optimal balance between. Matlab Simulink Lqr.
From www.youtube.com
MATLAB / Simulink Differential Flatness LQR controller YouTube Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. this method allows you to find the control gain that results in the optimal balance between system errors and control effort.. Matlab Simulink Lqr.
From blog.csdn.net
完整的PID和LQR四旋翼无人机simulink,matlab仿真CSDN博客 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft.. Matlab Simulink Lqr.
From blog.csdn.net
使用模糊逻辑/PID/LQR FSF 稳定倒立摆研究(Matlab&Simulink实现)_rllfcfCSDN博客 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft.. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. design an lqr servo controller in simulink. Assuming all. Matlab Simulink Lqr.
From blog.csdn.net
LQR 控制学习LQR控制 MATLAB官方教程LQR 控制器_状态空间系统Matlab/Simulink建模分析CSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. this method allows you to find the control. Matlab Simulink Lqr.
From blog.csdn.net
LQR控制算法及matlab/simulink仿真CSDN博客 Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. design an lqr servo controller in simulink. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and. Matlab Simulink Lqr.
From blog.csdn.net
使用Simulink和Matlab进行完整的PID和LQR控制的四旋翼无人机仿真:包含两个slx文件和一个m文件,附有相应学习资料_无人机 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the. Matlab Simulink Lqr.
From www.youtube.com
Compute and Simulate Linear Quadratic Regulator (LQR) in MATLAB for Matlab Simulink Lqr i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear. Matlab Simulink Lqr.
From matlabprojectscode.com
2 wheeled self balancing robot _ Self Balancing Robot _ LQR _ Self Matlab Simulink Lqr this method allows you to find the control gain that results in the optimal balance between system errors and control effort. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. design an lqr servo controller in simulink. The following figure shows a simulink ®. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. this method allows you to find the control gain that results in the optimal balance between system errors and control effort.. Matlab Simulink Lqr.
From blog.csdn.net
使用模糊逻辑/PID/LQR FSF 稳定倒立摆研究(Matlab&Simulink实现)_rllfcfCSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control. Matlab Simulink Lqr.
From blog.csdn.net
matlab simulink 一阶倒立摆LQR控制_一阶倒立摆simulinkCSDN博客 Matlab Simulink Lqr Assuming all the states are known we can design an optimal linear. design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic. Matlab Simulink Lqr.
From blog.csdn.net
一阶倒立摆仿真模型LQR控制算法 本仿真模型基于MATLAB/Simulink_lqr一级倒立摆simulink仿真CSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. Assuming all. Matlab Simulink Lqr.
From blog.csdn.net
【Advanced控制理论】8_LQR 控制器_状态空间系统Matlab/Simulink建模分析_lqr控制器simulinkCSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. in. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr design an lqr servo controller in simulink. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. Assuming all. Matlab Simulink Lqr.
From blog.csdn.net
LQR 控制学习LQR控制 MATLAB官方教程LQR 控制器_状态空间系统Matlab/Simulink建模分析CSDN博客 Matlab Simulink Lqr in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. Assuming all the states are known we can design an optimal linear. this method allows you to find the control gain that results in the optimal balance between system errors and control effort. i defined. Matlab Simulink Lqr.
From blog.csdn.net
LQR(线性二次型调节器)原理及matlab求解过程、simulink仿真ppt_simulink lqr 线性二次型调节CSDN博客 Matlab Simulink Lqr in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known as \$q \$ and \$r\$) and used the matlab command lqr to find the. Assuming all the states are known we can design. Matlab Simulink Lqr.
From www.youtube.com
LQR controller for tracking rather than just regulating! An example in Matlab Simulink Lqr design an lqr servo controller in simulink. in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. i defined my weight matrices \$r_1 \$ and \$r_2 \$ (also sometimes known. Matlab Simulink Lqr.
From blog.csdn.net
使用模糊逻辑/PID/LQR FSF 稳定倒立摆研究(Matlab&Simulink实现)_rllfcfCSDN博客 Matlab Simulink Lqr in this control engineering and control theory tutorial, we explain how to model and simulate linear quadratic regulator (lqr) optimal controller in. The following figure shows a simulink ® block diagram shows a tracking problem in aircraft. this method allows you to find the control gain that results in the optimal balance between system errors and control effort.. Matlab Simulink Lqr.