Maximum Likelihood Estimates Of Linear Dynamic Systems . The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.
from www.chegg.com
This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.
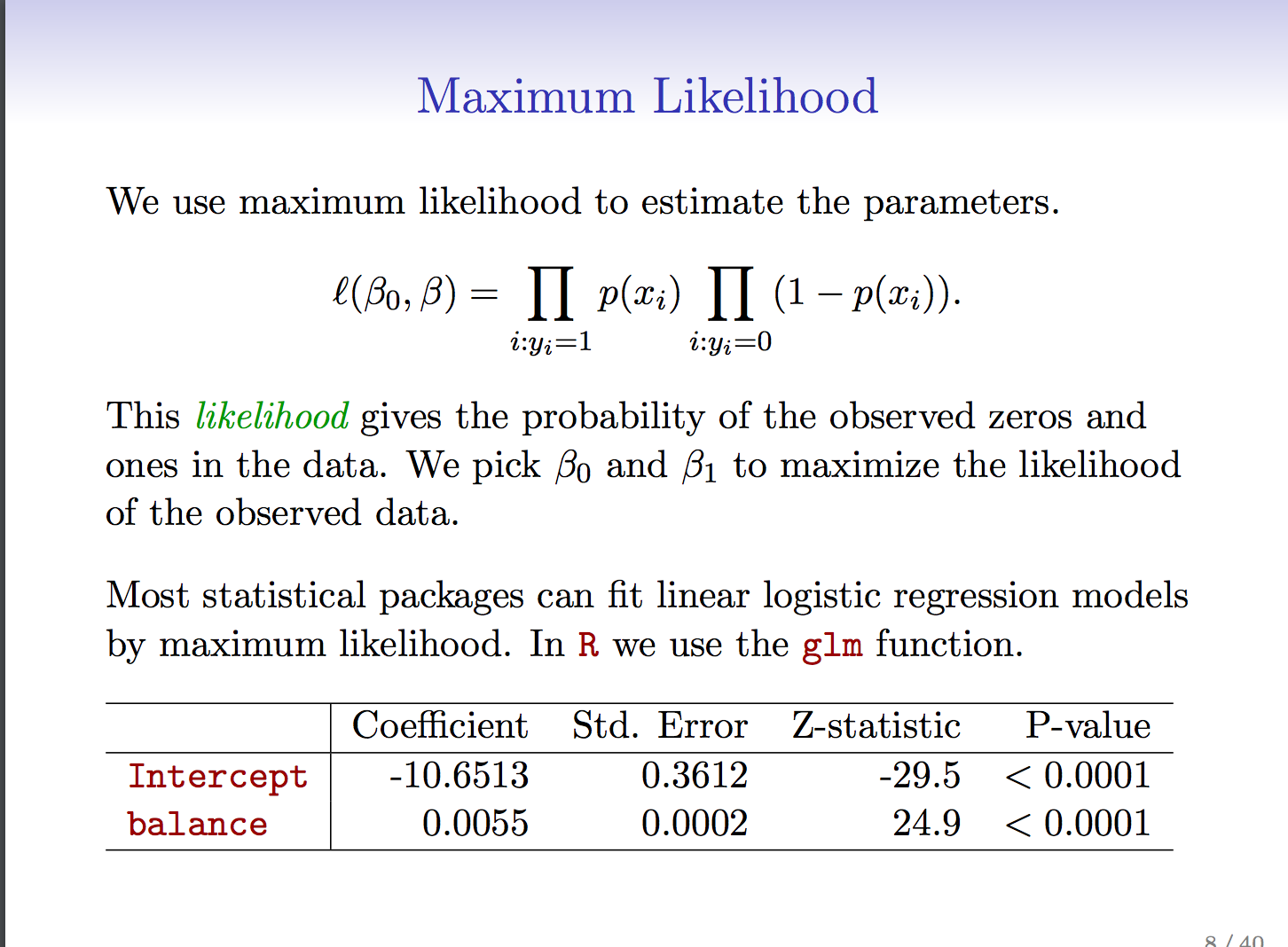
Solved We use maximum likelihood to estimate the parameters.
Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This report is concerned with the maximum likelihood estimation of dynamic system parameters. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.
From towardsdatascience.com
Probability concepts explained Maximum likelihood estimation by Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This report is concerned with. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From dokumen.tips
(PDF) Maximum likelihood estimates of linear dynamic systems DOKUMEN.TIPS Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This report is concerned with. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Matrix form of Linear Dynamical Systems YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. The ads is operated by. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From math.stackexchange.com
matrices Derivation of Maximum Likelihood Estimation for Multivariate Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.pinterest.com
Maximum Likelihood estimation in logistic regressioin Data science Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Simple Linear Regression PowerPoint Presentation, free download Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. In this paper, the problem of estimating the states of. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From studylib.net
Linear Dynamic PanelData Estimation using Maximum Likelihood Maximum Likelihood Estimates Of Linear Dynamic Systems In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear.. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.aptech.com
Maximum Likelihood Estimation in GAUSS Aptech Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Maximum likelihood estimation PowerPoint Presentation, free Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Maximum Likelihood Estimation Examples YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.chegg.com
Solved We use maximum likelihood to estimate the parameters. Maximum Likelihood Estimates Of Linear Dynamic Systems In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Similarity Transformation of a Linear Dynamic System YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This report is concerned. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.semanticscholar.org
Figure 2 from Constrained maximum likelihood estimation of timevarying Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Basics Maximum Likelihood EstimationIMLE) for Linear Regression Model Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will learn a fundamental method to construct estimators of unknown. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Machine learning Maximum likelihood and linear regression YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This report is concerned. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Chapter 3 Multiple Linear Regression PowerPoint Presentation Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.quantstart.com
Maximum Likelihood Estimation for Linear Regression QuantStart Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This report is concerned with. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.semanticscholar.org
[PDF] Linear Dynamic Paneldata Estimation Using Maximum Likelihood and Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Maximum Likelihood Estimation and Bayesian Estimation YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Simple Linear Regression Maximum Likelihood Estimation YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This report is concerned with the maximum likelihood estimation of dynamic system parameters. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. The ads is operated by. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From kalmanfilter.net
Modeling linear dynamic system Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Linear dynamical system YouTube Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Maximum Likelihood Estimation (MLE) MLE Variance Normal Distribution Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This report is concerned with the maximum likelihood estimation of dynamic system parameters. This chapter reviews the usefulness of. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Maximum likelihood estimates PowerPoint Presentation, free Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.analyticsvidhya.com
Mastering Maximum Likelihood Estimation Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From pmirla.github.io
Maximum Likelihood Estimate and Logistic Regression simplified — Pavan Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models.. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From towardsdatascience.com
Linear Regression. A unification of Maximum Likelihood… by William Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Maximum likelihood estimators PowerPoint Presentation, free Maximum Likelihood Estimates Of Linear Dynamic Systems The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.researchgate.net
(PDF) Identification and frequency domain quasi‐maximum likelihood Maximum Likelihood Estimates Of Linear Dynamic Systems In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideserve.com
PPT Applied Econometrics Maximum Likelihood Estimation and Discrete Maximum Likelihood Estimates Of Linear Dynamic Systems In this paper, the problem of estimating the states of linear dynamic systems in the presence of additive gaussian noise is considered and. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.researchgate.net
(PDF) Maximum Likelihood identification for Linear Dynamic Systems with Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. In this paper, the problem of estimating the states of. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.youtube.com
Maximum Likelihood Estimation of Parameters in Simple Linear Regression Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.researchgate.net
(PDF) Maximum likelihood estimation of change point from stationary to Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From stats.stackexchange.com
self study Maximum Likelihood Estimation of Coefficients for Linear Maximum Likelihood Estimates Of Linear Dynamic Systems This chapter reviews the usefulness of the kalman filter for parameter estimation and inference about unobserved variables in linear. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. This report is concerned with the maximum likelihood estimation. Maximum Likelihood Estimates Of Linear Dynamic Systems.
From www.slideshare.net
Maximum Likelihood Estimation of Linear TimeVarying Pilot Model Para… Maximum Likelihood Estimates Of Linear Dynamic Systems This report is concerned with the maximum likelihood estimation of dynamic system parameters. In this chapter, we will learn a fundamental method to construct estimators of unknown parameters in parametric models. The ads is operated by the smithsonian astrophysical observatory under nasa cooperative agreement 80nssc21m0056. In this paper, the problem of estimating the states of linear dynamic systems in the. Maximum Likelihood Estimates Of Linear Dynamic Systems.