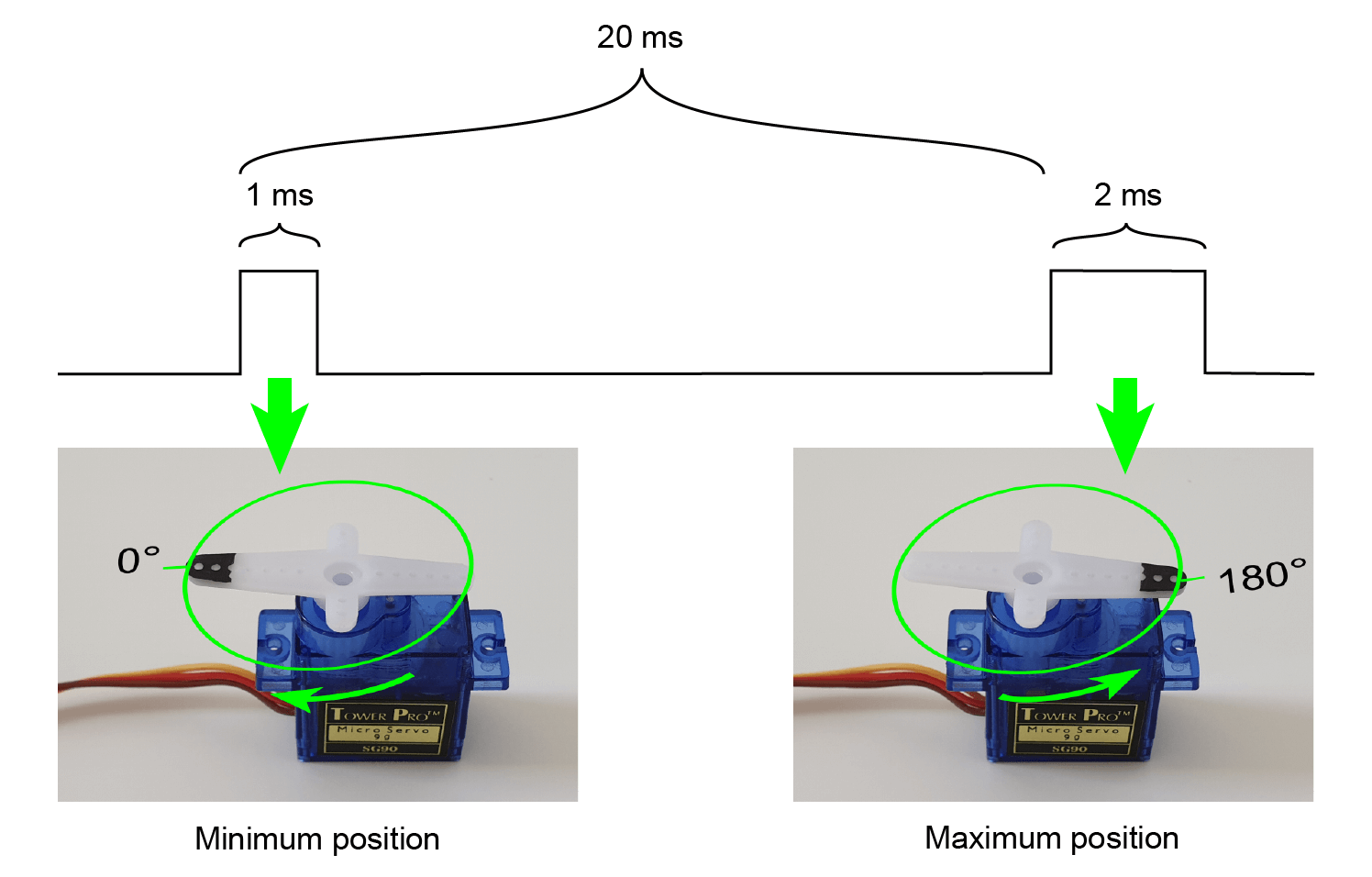
Servo Duty Cycle Rpi . The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. We store a reference to the pwm signal in a variable called. The period is the inverse of the frequency. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. In python and on the pi, the motor angle is calculated as a percentage of the cycle. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. We can use the following formula: To control our engine from a python script we will once again use the lib rpi.gpio.
from vhdlwhiz.com
To control our engine from a python script we will once again use the lib rpi.gpio. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. We store a reference to the pwm signal in a variable called. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. The period is the inverse of the frequency. We can use the following formula: In python and on the pi, the motor angle is calculated as a percentage of the cycle.
RC servo controller using PWM from an FPGA pin VHDLwhiz
Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. We store a reference to the pwm signal in a variable called. We can use the following formula: The period is the inverse of the frequency. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. To control our engine from a python script we will once again use the lib rpi.gpio. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. In python and on the pi, the motor angle is calculated as a percentage of the cycle.
From carlpaton.github.io
Pi Servo Control Carl Paton There are no silly questions Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. In python and on the pi, the motor angle is calculated as a percentage of the cycle. I see lots of tutorials online with. Servo Duty Cycle Rpi.
From www.donskytech.com
Servo Motor Control Using Raspberry Pi Servo Duty Cycle Rpi We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. We store a reference to the pwm signal in a variable called. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. In python and on the pi, the motor. Servo Duty Cycle Rpi.
From makersportal.com
Raspberry Pi Camera Panning with a Servo Motor — Maker Portal Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. In python and on the pi, the motor angle is calculated as a percentage of the cycle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. The control of raspberry pi servo motors is very simple and. Servo Duty Cycle Rpi.
From www.semanticscholar.org
Figure 4 from Servo Actuators with Induction Motor using Predictive Current Control with Duty Servo Duty Cycle Rpi To control our engine from a python script we will once again use the lib rpi.gpio. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We then start the servo by. Servo Duty Cycle Rpi.
From discuss.ardupilot.org
PWM Confusion Explained Other Hardware ArduPilot Discourse Servo Duty Cycle Rpi In python and on the pi, the motor angle is calculated as a percentage of the cycle. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. The period is the inverse of the frequency. In this tutorial, we will use the raspberry pi 5 to control the. Servo Duty Cycle Rpi.
From www.mdpi.com
Sensors Free FullText LowCost Servomotor Driver for PFM Control Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. In python and on the pi, the motor angle is calculated as a percentage of the cycle. From those pulse width values, we can. Servo Duty Cycle Rpi.
From www.electrocraft.com
Guide for High Performance Brushless DC Servo Systems ElectroCraft Servo Duty Cycle Rpi In python and on the pi, the motor angle is calculated as a percentage of the cycle. We can use the following formula: I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We store a reference to the pwm signal in a variable called. We then start the servo by sending. Servo Duty Cycle Rpi.
From infosys.beckhoff.com
Duty cycle evaluation Servo Duty Cycle Rpi From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. We can use the following formula: We store a reference to the pwm signal in a variable called.. Servo Duty Cycle Rpi.
From www.kiwi-electronics.com
Simply Servos Board for RPi Pico Kiwi Electronics Servo Duty Cycle Rpi I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We store a reference to the pwm signal in a variable called. The period is the inverse of the frequency. To control. Servo Duty Cycle Rpi.
From www.electronicwings.com
Servo Motor Basics, Working principle & interfacing with Arduino Servo Duty Cycle Rpi The period is the inverse of the frequency. We store a reference to the pwm signal in a variable called. In python and on the pi, the motor angle is calculated as a percentage of the cycle. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many. Servo Duty Cycle Rpi.
From www.researchgate.net
PWM Duty Cycle Measurements During Max., Min. and Middle Positions of... Download Scientific Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. We can use the following formula: In python and on the pi, the motor angle is calculated as a percentage of the cycle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. In this tutorial, we will. Servo Duty Cycle Rpi.
From www.engineersgarage.com
Interfacing Tower Pro SG90 9G servo motor with 8051(89c51, 89c52) microcontroller. Servo Duty Cycle Rpi We can use the following formula: We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. From those pulse width values, we can calculate the duty cycle to position the. Servo Duty Cycle Rpi.
From www.youtube.com
Todo sobre Servos y Raspberry Pi Pico. PWM, Duty Cycle, códigos en Micropython para servomotor Servo Duty Cycle Rpi We can use the following formula: The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. The period is the inverse of the frequency. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across. Servo Duty Cycle Rpi.
From overvolt.tech
Arduino Tutorial 7 Output analogico con il PWM overVolt Blog Servo Duty Cycle Rpi The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a. Servo Duty Cycle Rpi.
From docs.sunfounder.com
Servo — SunFounder 3in1 Kit documentation Servo Duty Cycle Rpi We can use the following formula: The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. We store a reference to the pwm signal in a variable called. In python and on the pi, the motor angle is calculated as a percentage of the cycle. We. Servo Duty Cycle Rpi.
From tecnosinergia.zendesk.com
4 tipos de ciclos de trabajo del motor que todo ingeniero debe conocer Centro de Ayuda Servo Duty Cycle Rpi We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. We can use the following formula: In python and on the pi, the motor angle is calculated as a percentage of the cycle. To control our engine from a python script we will once again use the lib. Servo Duty Cycle Rpi.
From backyardbrains.com
Experiment Controlling the Claw Servo Duty Cycle Rpi In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. I see lots of tutorials online with many different equations to calculate duty cycle. Servo Duty Cycle Rpi.
From vhdlwhiz.com
RC servo controller using PWM from an FPGA pin VHDLwhiz Servo Duty Cycle Rpi The period is the inverse of the frequency. To control our engine from a python script we will once again use the lib rpi.gpio. We store a reference to the pwm signal in a variable called. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. In this tutorial, we will use. Servo Duty Cycle Rpi.
From wokwi.com
rpi_servo_tarea Wokwi ESP32, STM32, Arduino Simulator Servo Duty Cycle Rpi In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. To control our engine from a python script we will once again use the lib rpi.gpio. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We can. Servo Duty Cycle Rpi.
From wokwi.com
servo control for potentiometer code rpi pico Wokwi ESP32, STM32, Arduino Simulator Servo Duty Cycle Rpi To control our engine from a python script we will once again use the lib rpi.gpio. We store a reference to the pwm signal in a variable called. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. The control of raspberry pi servo motors is very simple and thanks. Servo Duty Cycle Rpi.
From www.engineersgarage.com
Controlling Servo Motor with Stm32f103 microcontroller using stm32cubemx code configurator by Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. To control our engine from a python script we will once again use the lib rpi.gpio. In this tutorial, we will use the raspberry pi 5. Servo Duty Cycle Rpi.
From www.pinterest.com
Sg90 servo motor pwm signal requirements duty cycle and frequency Microcontrollers, Interface Servo Duty Cycle Rpi The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. We then start the servo by sending 0% duty cycle, essentially saying that the servo is not taking any commands just yet. To control our engine from a python script we will once again use the. Servo Duty Cycle Rpi.
From makersportal.com
Raspberry Pi Camera Panning with a Servo Motor — Maker Portal Servo Duty Cycle Rpi From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. In python and on the pi, the motor angle is calculated as a percentage of the cycle. To control our engine from a python script we will once again use the lib rpi.gpio. In this tutorial, we will use the. Servo Duty Cycle Rpi.
From blog.wokwi.com
Learn to Control Servo motor using PWM Wokwi Style Servo Duty Cycle Rpi The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. In python and on the pi, the motor angle is calculated as a percentage of the cycle. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back. Servo Duty Cycle Rpi.
From wokwi.com
RPi_PWM_Potenciometro_Servo Wokwi ESP32, STM32, Arduino Simulator Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas.. Servo Duty Cycle Rpi.
From ahssinsights.org
Mechanical Press Archives AHSS Guidelines Servo Duty Cycle Rpi We store a reference to the pwm signal in a variable called. In python and on the pi, the motor angle is calculated as a percentage of the cycle. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. To control our engine from a python script we will once again use. Servo Duty Cycle Rpi.
From www.researchgate.net
Duty Cycle and Angle Equation (Servo Motor) Download Scientific Diagram Servo Duty Cycle Rpi I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are used in many areas. We store a reference to the pwm signal in a variable called. In python and on the pi,. Servo Duty Cycle Rpi.
From www.celeramotion.com
Efficiency and Power in Servo Drives Ingenia Servo Drives Servo Duty Cycle Rpi I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We can use the following formula: To control our engine from a python script we will once again use the lib rpi.gpio. The control of raspberry pi servo motors is very simple and thanks to the small size and weight they are. Servo Duty Cycle Rpi.
From www.learnrobotics.org
How to Control a Servo with Raspberry Pi Learn Robotics Servo Duty Cycle Rpi I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We store a reference to the pwm signal in a variable called. In python and on the pi, the motor angle is calculated as a percentage of the cycle. From those pulse width values, we can calculate the duty cycle to position. Servo Duty Cycle Rpi.
From www.donskytech.com
Servo Motor Control Using Raspberry Pi Servo Duty Cycle Rpi I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. To control our engine from a python script we will once again use the lib rpi.gpio. We store a reference to the. Servo Duty Cycle Rpi.
From www.youtube.com
How To Control A Standard Servo With Raspberry Pi YouTube Servo Duty Cycle Rpi From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. The period is the inverse of the frequency. We then start the servo by sending 0%. Servo Duty Cycle Rpi.
From www.chegg.com
Solved Servos are also driven with PWM, but in a very weird Servo Duty Cycle Rpi The period is the inverse of the frequency. From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. In this tutorial, we will use the raspberry pi 5 to control the servo. Servo Duty Cycle Rpi.
From www.youtube.com
Electronics How to calculate duty cycle of a servo motor? YouTube Servo Duty Cycle Rpi From those pulse width values, we can calculate the duty cycle to position the motor’s shaft at a certain angle. We store a reference to the pwm signal in a variable called. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We then start the servo by sending 0% duty cycle,. Servo Duty Cycle Rpi.
From slideplayer.com.br
Prof. Anderson Terroso Junho/ ppt carregar Servo Duty Cycle Rpi The period is the inverse of the frequency. In python and on the pi, the motor angle is calculated as a percentage of the cycle. I see lots of tutorials online with many different equations to calculate duty cycle for a given angle. We can use the following formula: We then start the servo by sending 0% duty cycle, essentially. Servo Duty Cycle Rpi.
From pic-microcontroller.com
Basic Servo Motor Controlling with Microchip PIC Microcontroller Servo Duty Cycle Rpi In this tutorial, we will use the raspberry pi 5 to control the servo motor shaft to sweep back and forth across 180 degrees. The period is the inverse of the frequency. We can use the following formula: In python and on the pi, the motor angle is calculated as a percentage of the cycle. We then start the servo. Servo Duty Cycle Rpi.