Stepper Motor Driver Enable Pin . When the ena signal is low (or in the enabled state), the stepper driver can. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. As a test, connect the en pin on the motor driver to motor driver ground with a wire. The wiring diagram below shows you. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. For this we use the function digitalwrite(). To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. From what i can see it is used to allow voltage and. Keeping en_pin high would deactivate the motor, regardless of the driver's state. I was looking online to better understand what the enable pin does? That should prevent the motor from running. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy.
from www.technobotsonline.com
Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. For this we use the function digitalwrite(). As a test, connect the en pin on the motor driver to motor driver ground with a wire. When the ena signal is low (or in the enabled state), the stepper driver can. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. From what i can see it is used to allow voltage and. Keeping en_pin high would deactivate the motor, regardless of the driver's state. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip.
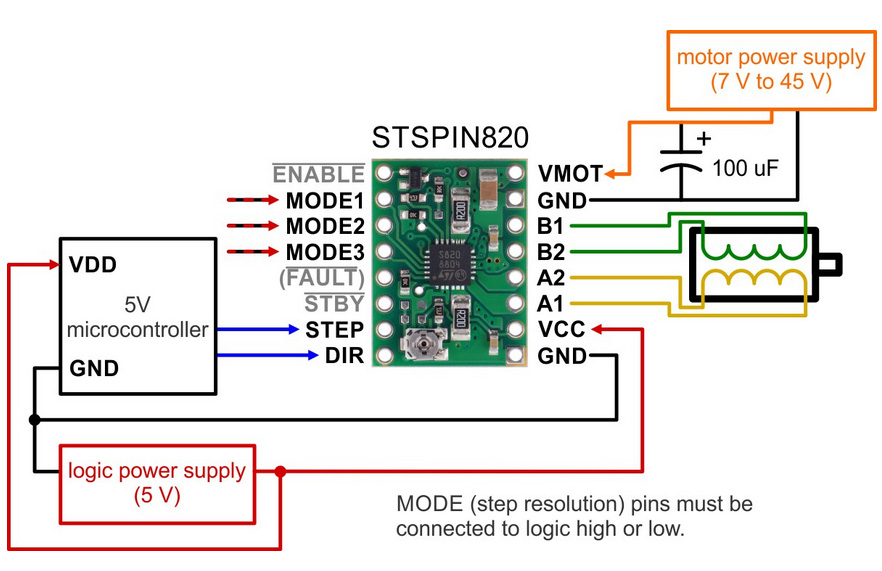
Pololu STSPIN820 Low Voltage Stepper Motor Driver (Header Pins Soldered)
Stepper Motor Driver Enable Pin The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. I was looking online to better understand what the enable pin does? The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. That should prevent the motor from running. When the ena signal is low (or in the enabled state), the stepper driver can. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. As a test, connect the en pin on the motor driver to motor driver ground with a wire. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. The wiring diagram below shows you. From what i can see it is used to allow voltage and. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. For this we use the function digitalwrite(). Keeping en_pin high would deactivate the motor, regardless of the driver's state.
From support.envistiamall.com
L298N Dual H Bridge DC Stepper Motor PWM Drive Controller Envistia Mall Support Stepper Motor Driver Enable Pin The enable pin (en_pin) is also set low, which activates the driver and powers the motor. For this we use the function digitalwrite(). Keeping en_pin high would deactivate the motor, regardless of the driver's state. The wiring diagram below shows you. I was looking online to better understand what the enable pin does? As a test, connect the en pin. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Stepper motors vibrates for 1 seconds on start Stepper Motor Driver Enable Pin The enable pin (en_pin) is also set low, which activates the driver and powers the motor. When the ena signal is low (or in the enabled state), the stepper driver can. As a test, connect the en pin on the motor driver to motor driver ground with a wire. Connecting the tb6600 stepper motor driver to an arduino and stepper. Stepper Motor Driver Enable Pin.
From www.researchgate.net
X and Y axis stepper motor driver circuit. As shown in Fig. 5, two... Download Scientific Diagram Stepper Motor Driver Enable Pin Keeping en_pin high would deactivate the motor, regardless of the driver's state. From what i can see it is used to allow voltage and. That should prevent the motor from running. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. The enable pin (en_pin) is also set low, which activates. Stepper Motor Driver Enable Pin.
From www.youtube.com
PROJECT 005 CONTROL A STEPPER MOTOR WITH DM542 DRIVER AND ARDUINO YouTube Stepper Motor Driver Enable Pin The wiring diagram below shows you. That should prevent the motor from running. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. To control the spinning direction of the stepper motor we set. Stepper Motor Driver Enable Pin.
From www.researchcell.com
A4988 Stepper Motor Driver User Guide Stepper Motor Driver Enable Pin The enable pin (en_pin) is also set low, which activates the driver and powers the motor. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. That should prevent the motor from running. From what i can see it is used to allow voltage and. I was looking online to better. Stepper Motor Driver Enable Pin.
From www.majju.pk
L298N Motor Driver Module, Schematic, datasheet, pinout Stepper Motor Driver Enable Pin To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. As a test, connect the en. Stepper Motor Driver Enable Pin.
From arduinogetstarted.com
Arduino Controls Stepper Motor using L298N Driver Arduino Tutorial Stepper Motor Driver Enable Pin I was looking online to better understand what the enable pin does? Keeping en_pin high would deactivate the motor, regardless of the driver's state. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. That should prevent the motor from running. When the ena signal is low (or in the enabled state), the stepper driver. Stepper Motor Driver Enable Pin.
From www.engineersgarage.com
Stm32f103 microcontroller controlling stepper motor by A4988 stepper motor driver module Stepper Motor Driver Enable Pin For this we use the function digitalwrite(). The enable pin (en_pin) is also set low, which activates the driver and powers the motor. Keeping en_pin high would deactivate the motor, regardless of the driver's state. When the ena signal is low (or in the enabled state), the stepper driver can. Controller pin can output 8 ~ 15ma current to drive. Stepper Motor Driver Enable Pin.
From www.engineersgarage.com
Stm32f103 microcontroller controlling stepper motor by A4988 stepper motor driver module Stepper Motor Driver Enable Pin Keeping en_pin high would deactivate the motor, regardless of the driver's state. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can output 8 ~ 15ma current to drive the internal. Stepper Motor Driver Enable Pin.
From www.omc-stepperonline.com
How to use stepper motor? Stepper Motor Driver Enable Pin From what i can see it is used to allow voltage and. The wiring diagram below shows you. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. As a test, connect the en pin on the motor driver to motor driver ground with a wire. Connecting the tb6600 stepper. Stepper Motor Driver Enable Pin.
From wirepartrecaptions.z21.web.core.windows.net
Stepper Motor Driver Wiring Stepper Motor Driver Enable Pin Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Keeping en_pin high would deactivate the motor, regardless of the driver's state. For this we use the function digitalwrite(). That should prevent the motor from running.. Stepper Motor Driver Enable Pin.
From www.technobotsonline.com
Pololu STSPIN820 Low Voltage Stepper Motor Driver (Header Pins Soldered) Stepper Motor Driver Enable Pin The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. When the ena signal is low (or in the enabled state), the stepper driver can. For this we use the function digitalwrite(). The wiring diagram below shows you. From what i can see it is used to allow voltage and.. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Stepper Driver enable pin has no effect TMC2208, AccelStepper, Teensy3.2 Motors, Mechanics Stepper Motor Driver Enable Pin The enable pin (en_pin) is also set low, which activates the driver and powers the motor. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. From what i can see it is used to allow voltage. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Resolution of Stepper Motor Motors, Mechanics, Power and CNC Arduino Forum Stepper Motor Driver Enable Pin For this we use the function digitalwrite(). The wiring diagram below shows you. As a test, connect the en pin on the motor driver to motor driver ground with a wire. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. I was looking online to better understand what the enable. Stepper Motor Driver Enable Pin.
From www.researchcell.com
A4988 Stepper Motor Driver User Guide Stepper Motor Driver Enable Pin That should prevent the motor from running. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. I was looking online to better understand what the enable pin does? The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The wiring diagram below shows. Stepper Motor Driver Enable Pin.
From vctec.co.kr
초저소음 TMC2208 스텝모터 드라이버 (TMC2208 Stepper Motor Driver) Stepper Motor Driver Enable Pin Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. For this we use the function digitalwrite(). I was looking online to better understand what the enable pin does? Keeping en_pin high would deactivate the motor, regardless of the driver's state. The enable signal (ena) of the stepper driver is usually used to control the. Stepper Motor Driver Enable Pin.
From coeleveld.com
Arduino + Stepper (L298N) Stepper Motor Driver Enable Pin The wiring diagram below shows you. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. From what i can see it is used to allow voltage and. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. As a test, connect the en pin. Stepper Motor Driver Enable Pin.
From arduinogetstarted.com
Arduino Controls Stepper Motor using L298N Driver Arduino Tutorial Stepper Motor Driver Enable Pin As a test, connect the en pin on the motor driver to motor driver ground with a wire. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. That should prevent the motor from running. For. Stepper Motor Driver Enable Pin.
From manualspro.net
DFROBOT TB6600 Stepper Motor Driver User Guide Stepper Motor Driver Enable Pin Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. I was looking online to better understand what the enable pin does? The enable pin (en_pin) is also set low, which activates the driver and powers the motor. As a test, connect the en pin on the motor driver to motor driver ground with a wire.. Stepper Motor Driver Enable Pin.
From www.pinterest.com
TB6600 Stepper Motor Driver with Arduino Tutorial (3 Examples) Arduino, Stepper motor, Arduino Stepper Motor Driver Enable Pin That should prevent the motor from running. From what i can see it is used to allow voltage and. Keeping en_pin high would deactivate the motor, regardless of the driver's state. The wiring diagram below shows you. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. When the ena signal is low (or in the. Stepper Motor Driver Enable Pin.
From electropeak.com
Interfacing A4988 Stepper Motor Driver with Arduino Electropeak Stepper Motor Driver Enable Pin The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. To control the spinning direction of the stepper motor we set. Stepper Motor Driver Enable Pin.
From fbicomplaints.blogspot.com
10 tb6600 stepper motor driver arduino Wiring stepper tb6600 driver grbl ötletek mungfali Stepper Motor Driver Enable Pin The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. I was looking online to better understand. Stepper Motor Driver Enable Pin.
From mavink.com
Tb6600 Pinout Stepper Motor Driver Enable Pin For this we use the function digitalwrite(). Keeping en_pin high would deactivate the motor, regardless of the driver's state. As a test, connect the en pin on the motor driver to motor driver ground with a wire. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Controller pin can. Stepper Motor Driver Enable Pin.
From www.makerguides.com
TB6600 Stepper Motor Driver con Arduino Tutorial (3 Ejemplos) Stepper Motor Driver Enable Pin I was looking online to better understand what the enable pin does? The enable pin (en_pin) is also set low, which activates the driver and powers the motor. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. As a test, connect the en pin on the motor driver to. Stepper Motor Driver Enable Pin.
From www.makerguides.com
ESP32 And TB6600 Stepper Motor Driver Stepper Motor Driver Enable Pin When the ena signal is low (or in the enabled state), the stepper driver can. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. The wiring diagram below shows you. The enable pin (en_pin) is also set low, which activates the driver and powers the motor. Connecting the tb6600. Stepper Motor Driver Enable Pin.
From electropeak.com
Interfacing DRV8825 Stepper Motor Driver with Arduino Electropeak Stepper Motor Driver Enable Pin I was looking online to better understand what the enable pin does? To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. Connecting the tb6600 stepper motor driver to an arduino. Stepper Motor Driver Enable Pin.
From mungfali.com
Stepper Motor Driver Tb6600 And Esp32 > Guides > Mechape 755 Stepper Motor Driver Enable Pin As a test, connect the en pin on the motor driver to motor driver ground with a wire. When the ena signal is low (or in the enabled state), the stepper driver can. For this we use the function digitalwrite(). The enable pin (en_pin) is also set low, which activates the driver and powers the motor. To control the spinning. Stepper Motor Driver Enable Pin.
From ozeki.hu
Ozeki Stepper Motor Controller Module Stepper Motor Driver Enable Pin The wiring diagram below shows you. From what i can see it is used to allow voltage and. Keeping en_pin high would deactivate the motor, regardless of the driver's state. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. For this we use the function digitalwrite(). The enable pin (en_pin). Stepper Motor Driver Enable Pin.
From how2electronics.com
Control Stepper Motor with A4988 Driver & ESP8266 Stepper Motor Driver Enable Pin The wiring diagram below shows you. For this we use the function digitalwrite(). As a test, connect the en pin on the motor driver to motor driver ground with a wire. Keeping en_pin high would deactivate the motor, regardless of the driver's state. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. From what i. Stepper Motor Driver Enable Pin.
From diagrammanualdurr.z13.web.core.windows.net
Tb6600 Stepper Motor Driver Schematic Stepper Motor Driver Enable Pin The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. That should prevent the motor from running. For this we use the function digitalwrite(). When the ena signal is low (or in the enabled state), the stepper driver can. Connecting the tb6600 stepper motor driver to an arduino and stepper. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Stepper Driver enable pin has no effect TMC2208, AccelStepper, Teensy3.2 Motors, Mechanics Stepper Motor Driver Enable Pin That should prevent the motor from running. When the ena signal is low (or in the enabled state), the stepper driver can. Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. The wiring diagram below shows. Stepper Motor Driver Enable Pin.
From www.norwegiancreations.com
Arduino Tutorial Stepper Motor with EasyDriver Norwegian Creations Stepper Motor Driver Enable Pin When the ena signal is low (or in the enabled state), the stepper driver can. I was looking online to better understand what the enable pin does? Controller pin can output 8 ~ 15ma current to drive the internal optocoupler chip. Keeping en_pin high would deactivate the motor, regardless of the driver's state. For this we use the function digitalwrite().. Stepper Motor Driver Enable Pin.
From microcontrollerslab.com
28BYJ48 Stepper Motor Interfacing with TM4C123 Tiva Launchpad Stepper Motor Driver Enable Pin Connecting the tb6600 stepper motor driver to an arduino and stepper motor is fairly easy. The wiring diagram below shows you. As a test, connect the en pin on the motor driver to motor driver ground with a wire. When the ena signal is low (or in the enabled state), the stepper driver can. The enable signal (ena) of the. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Stepper Driver enable pin has no effect TMC2208, AccelStepper, Teensy3.2 Motors, Mechanics Stepper Motor Driver Enable Pin As a test, connect the en pin on the motor driver to motor driver ground with a wire. The enable signal (ena) of the stepper driver is usually used to control the working status of the stepper driver. For this we use the function digitalwrite(). I was looking online to better understand what the enable pin does? That should prevent. Stepper Motor Driver Enable Pin.
From forum.arduino.cc
Stepper Driver enable pin has no effect TMC2208, AccelStepper, Teensy3.2 Motors, Mechanics Stepper Motor Driver Enable Pin As a test, connect the en pin on the motor driver to motor driver ground with a wire. From what i can see it is used to allow voltage and. For this we use the function digitalwrite(). To control the spinning direction of the stepper motor we set the dir (direction) pin either high or low. The wiring diagram below. Stepper Motor Driver Enable Pin.