Yaw Pitch Roll To Direction Vector . It'd be especially cool if you can show me a. We perform the following steps:. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. How would i convert these to a directional vector? I have pitch, roll, and yaw angles. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? Is it possible to find the unit vector with: This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0).
from velog.io
I have pitch, roll, and yaw angles. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). How would i convert these to a directional vector? Is it possible to find the unit vector with: We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. It'd be especially cool if you can show me a. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. We perform the following steps:.
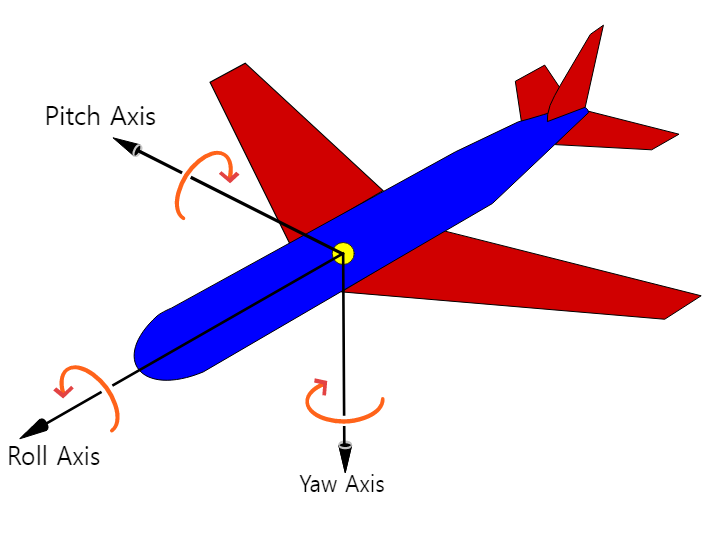
Rotation Yaw, Pitch, Roll
Yaw Pitch Roll To Direction Vector We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. It'd be especially cool if you can show me a. How would i convert these to a directional vector? I have pitch, roll, and yaw angles. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). We perform the following steps:. This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Is it possible to find the unit vector with: I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up.
From www.pinterest.com
Axis rotations (pitch, yaw and roll) and translation specified by a Yaw Pitch Roll To Direction Vector How would i convert these to a directional vector? I have pitch, roll, and yaw angles. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. Is it possible to find the unit vector with: We perform the following steps:. Imagine i have a line (or a box). Yaw Pitch Roll To Direction Vector.
From velog.io
Rotation Yaw, Pitch, Roll Yaw Pitch Roll To Direction Vector Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w). Yaw Pitch Roll To Direction Vector.
From epicflightacademy.com
Yaw in Aircraft Essential Aviation Knowledge for Pilots Yaw Pitch Roll To Direction Vector How would i convert these to a directional vector? It'd be especially cool if you can show me a. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). We perform the following steps:. This matlab function. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
1 Roll, yaw and pitch motion of a moving vessel. The same motions apply Yaw Pitch Roll To Direction Vector This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. I have pitch, roll, and yaw angles. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use. Yaw Pitch Roll To Direction Vector.
From www.machinedesign.com
What’s the Difference Between Pitch, Roll, and Yaw? Machine Design Yaw Pitch Roll To Direction Vector Is it possible to find the unit vector with: We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. How would i convert these to a directional vector? I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates. Yaw Pitch Roll To Direction Vector.
From support.pix4d.com
Yaw, Pitch, Roll and Omega, Phi, Kappa angles Yaw Pitch Roll To Direction Vector Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. We. Yaw Pitch Roll To Direction Vector.
From highsierrapilots.club
rollpitchyawdiagram High Sierra Pilots Yaw Pitch Roll To Direction Vector Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. I have pitch,. Yaw Pitch Roll To Direction Vector.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll To Direction Vector I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. How would i convert these to a directional vector? I have pitch, roll, and yaw angles. This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Imagine. Yaw Pitch Roll To Direction Vector.
From www.pinterest.com
Roll Pitch Yaw Aviation, Geometry formulas, Schemes Yaw Pitch Roll To Direction Vector I have pitch, roll, and yaw angles. How would i convert these to a directional vector? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). We want to give the aircraft a set of yaw, pitch. Yaw Pitch Roll To Direction Vector.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll To Direction Vector Is it possible to find the unit vector with: Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch,. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Orientation of the head in terms of pitch, roll, and yaw movements Yaw Pitch Roll To Direction Vector It'd be especially cool if you can show me a. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? How would i convert these to a directional vector? We perform the following. Yaw Pitch Roll To Direction Vector.
From www.youtube.com
Relationship between ROLL and YAW! Understanding Roll due to Yaw Yaw Pitch Roll To Direction Vector Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values would i use for those angles? Is it possible to find the unit vector with: We perform the following steps:. I have pitch, roll, and yaw angles. Given a. Yaw Pitch Roll To Direction Vector.
From ouo0725.github.io
Inertial Measurement Unit (IMU) MCU course Yaw Pitch Roll To Direction Vector It'd be especially cool if you can show me a. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1,. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll To Direction Vector Is it possible to find the unit vector with: How would i convert these to a directional vector? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Imagine i have a line (or a box) in. Yaw Pitch Roll To Direction Vector.
From www.shutterstock.com
9 Aircraft Yaw Stock Vectors and Vector Art Shutterstock Yaw Pitch Roll To Direction Vector This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Is it possible to find the unit vector with: How would i convert these to a directional vector? Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to. Yaw Pitch Roll To Direction Vector.
From www.shutterstock.com
Yawing 3 685 images, photos et images vectorielles de stock Yaw Pitch Roll To Direction Vector Is it possible to find the unit vector with: Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch,. Yaw Pitch Roll To Direction Vector.
From www.freepik.com
Premium Vector Roll, pitch, yaw three rotation angles corresponding Yaw Pitch Roll To Direction Vector How would i convert these to a directional vector? We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin,. Yaw Pitch Roll To Direction Vector.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Yaw Pitch Roll To Direction Vector It'd be especially cool if you can show me a. This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values. Yaw Pitch Roll To Direction Vector.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll To Direction Vector Is it possible to find the unit vector with: We perform the following steps:. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). I have pitch, roll, and yaw angles. Imagine i have a line (or. Yaw Pitch Roll To Direction Vector.
From www.alamy.com
Roll Pitch Yaw Stock Photo Alamy Yaw Pitch Roll To Direction Vector I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. I have pitch, roll, and yaw angles. How would i convert these to a directional vector? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w). Yaw Pitch Roll To Direction Vector.
From mungfali.com
Roll Pitch Yaw Symbols Yaw Pitch Roll To Direction Vector It'd be especially cool if you can show me a. How would i convert these to a directional vector? We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. I have pitch, roll, and yaw angles. I have the code below that takes a set of yaw, pitch,. Yaw Pitch Roll To Direction Vector.
From oer.pressbooks.pub
Aircraft Equations of Motion Introduction to Aerospace Flight Vehicles Yaw Pitch Roll To Direction Vector Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). How would i convert these to a directional vector? I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees),. Yaw Pitch Roll To Direction Vector.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll To Direction Vector We perform the following steps:. Is it possible to find the unit vector with: This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. It'd be especially cool if you can show me a. How would i convert these to a directional vector? We want to give the aircraft a set. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Definition of pitch, roll, and yaw degrees of freedom. Download Yaw Pitch Roll To Direction Vector How would i convert these to a directional vector? We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. I have pitch, roll, and yaw angles. Is it possible to find the unit vector with: Given a yaw angle ϕ ϕ and a pitch angle θ θ we. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll To Direction Vector Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Is it possible to find the unit vector. Yaw Pitch Roll To Direction Vector.
From www.droneybee.com
ROLL, PITCH, YAW Yaw Pitch Roll To Direction Vector We perform the following steps:. This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. Is it possible to find the unit vector with: We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. I have the code below. Yaw Pitch Roll To Direction Vector.
From space.stackexchange.com
artificial satellite Determine Yaw, Pitch, Roll from two vectors Yaw Pitch Roll To Direction Vector Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. This matlab function calculates the. Yaw Pitch Roll To Direction Vector.
From sites.google.com
Instrumentation The Smart Gimbal Yaw Pitch Roll To Direction Vector It'd be especially cool if you can show me a. I have pitch, roll, and yaw angles. This matlab function calculates the direction cosine matrix dcm given a set of three rotation angles, rotationang1, rotationang2, and. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. I have. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Yaw Pitch Roll To Direction Vector We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. How would i convert these to a directional vector? Is it possible to find the unit vector with: Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w). Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Six degrees of freedom. Rotations pitch, yaw, and roll and Yaw Pitch Roll To Direction Vector I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. How would i convert these to a directional vector? Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Illustration of ship motion, showing roll, pitch, and yaw, the three Yaw Pitch Roll To Direction Vector I have pitch, roll, and yaw angles. Given a yaw angle ϕ ϕ and a pitch angle θ θ we transform the direction vector (u, v, w) (u, v, w) onto the view axis (1, 0, 0) (1, 0, 0). We perform the following steps:. I have the code below that takes a set of yaw, pitch, and roll rotation. Yaw Pitch Roll To Direction Vector.
From www.vectornav.com
Attitude representation in inertial navigation · VectorNav Yaw Pitch Roll To Direction Vector I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. We perform the following steps:. Imagine i have a line (or a box) in 3d and i want to transform its heading, pitch, and bank to point to the 3d point from the origin, what values. Yaw Pitch Roll To Direction Vector.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll To Direction Vector I have pitch, roll, and yaw angles. We perform the following steps:. How would i convert these to a directional vector? We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. Is it possible to find the unit vector with: I have the code below that takes a. Yaw Pitch Roll To Direction Vector.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll To Direction Vector I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. How would i convert these to a directional vector? Imagine i have a line. Yaw Pitch Roll To Direction Vector.
From www.researchgate.net
Directions of Roll, Pitch and Yaw Download Scientific Diagram Yaw Pitch Roll To Direction Vector I have pitch, roll, and yaw angles. We want to give the aircraft a set of yaw, pitch and roll commands, causing it to rotate to a new orientation. I have the code below that takes a set of yaw, pitch, and roll rotation angles (in degrees), and populates forward, right, and up. We perform the following steps:. This matlab. Yaw Pitch Roll To Direction Vector.