Differential Drive Kinematics Derivation . Our logistics robot had super simple kinematics: We start by looking at how a single rotating wheel moves. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. 2 kinematic analysis of the di erential drive vehicle. The goal of this section is to derive a relationship between the wheel speeds. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. kinematics of differential drive robots. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. derivation of the forward kinematics equations.
from www.youtube.com
The goal of this section is to derive a relationship between the wheel speeds. kinematics of differential drive robots. derivation of the forward kinematics equations. We start by looking at how a single rotating wheel moves. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. 2 kinematic analysis of the di erential drive vehicle. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. Our logistics robot had super simple kinematics:
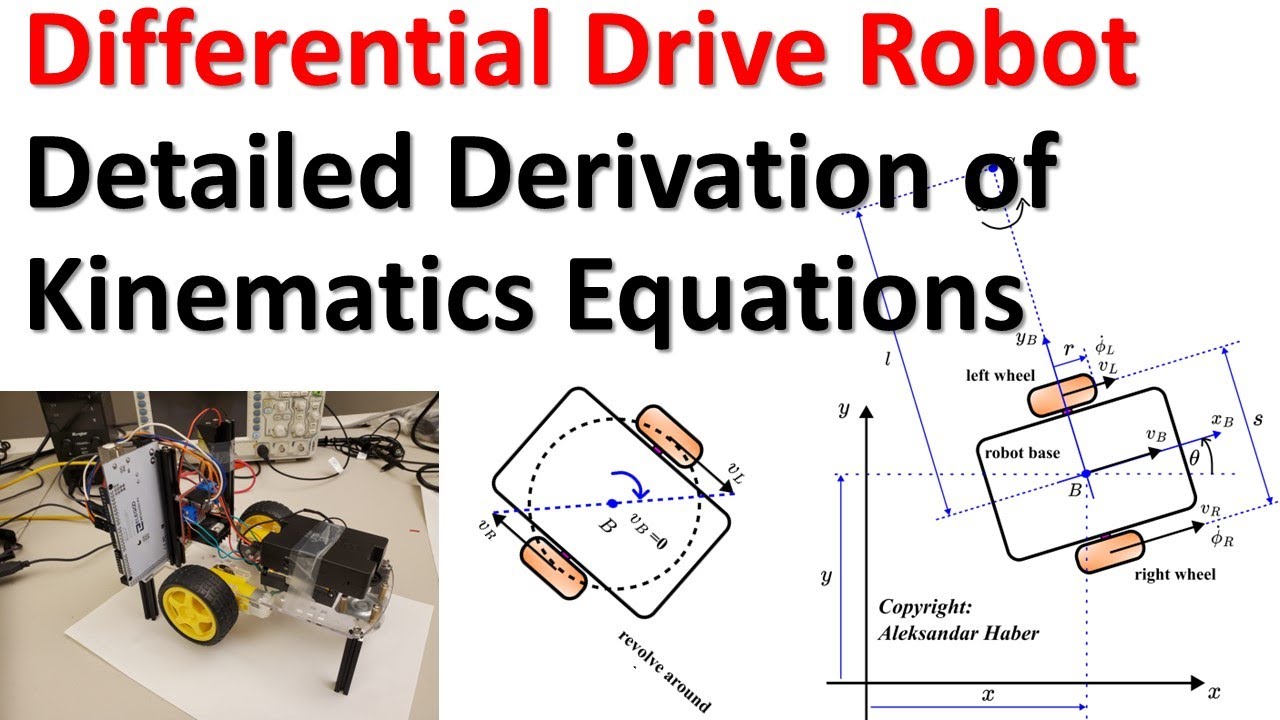
Detailed and Correct Derivation of Kinematics Equations of Differential
Differential Drive Kinematics Derivation relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. We start by looking at how a single rotating wheel moves. Our logistics robot had super simple kinematics: relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. The goal of this section is to derive a relationship between the wheel speeds. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. kinematics of differential drive robots. derivation of the forward kinematics equations. 2 kinematic analysis of the di erential drive vehicle.
From www.slideserve.com
PPT Kinematics of Mobile Robots PowerPoint Presentation, free Differential Drive Kinematics Derivation we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. kinematics of differential drive robots. Our logistics robot had super simple kinematics: One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. 2 kinematic analysis of. Differential Drive Kinematics Derivation.
From aleksandarhaber.com
Clear and Detailed Explanation of Kinematics, Equations, and Geometry Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore. Differential Drive Kinematics Derivation.
From www.researchgate.net
Kinematics of a differentialdrive configuration. The red bold arrow Differential Drive Kinematics Derivation 2 kinematic analysis of the di erential drive vehicle. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. Our logistics robot had super simple kinematics: We start by looking at how a single rotating wheel moves. derivation of the forward kinematics equations. we can derive the relationship between wheel. Differential Drive Kinematics Derivation.
From aleksandarhaber.com
Clear and Detailed Explanation of Kinematics, Equations, and Geometry Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Our logistics robot had super simple kinematics: derivation of the forward kinematics equations. We start by looking at how a single rotating wheel moves. The goal of. Differential Drive Kinematics Derivation.
From www.chegg.com
Solved Figure 2 depicts a differential drive robot and the Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. We start by looking at how a single rotating wheel moves. derivation of the forward kinematics equations. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. we can derive the relationship between wheel rotation and. Differential Drive Kinematics Derivation.
From www.numerade.com
SOLVED A differential drive robot is characterized by the following Differential Drive Kinematics Derivation kinematics of differential drive robots. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. The goal of this section is to derive a relationship between the wheel speeds. We start by looking at how a single rotating wheel moves. relations between motion (velocity) in. Differential Drive Kinematics Derivation.
From www.researchgate.net
Mobile robot's kinematic model of the nonholonomic differential drive Differential Drive Kinematics Derivation relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. The goal of this section is to derive a relationship between the wheel speeds. We start by looking at how a single rotating wheel moves. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic. Differential Drive Kinematics Derivation.
From medium.com
Drives. Differential Drive by Ruthu S Sanketh MANUAL ROBOTICS Medium Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. kinematics of differential drive robots. derivation of the forward kinematics equations. Our logistics robot had super simple kinematics: 2 kinematic analysis of the di erential drive vehicle. relations between motion (velocity) in joint space and motion (linear/angular velocity) in. Differential Drive Kinematics Derivation.
From www.scribd.com
Differential Drive Kinematics PDF Kinematics Velocity Differential Drive Kinematics Derivation kinematics of differential drive robots. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. 2 kinematic analysis of the di erential drive vehicle. The goal of this section is to derive a relationship between the wheel speeds. we can derive the relationship between wheel rotation and robot velocity by. Differential Drive Kinematics Derivation.
From www.reddit.com
Inverse differential drive kinematics r/MechanicalEngineering Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. 2 kinematic analysis of the di erential drive vehicle. Our logistics robot had super simple kinematics: The goal of this section is to derive a relationship between the wheel speeds. derivation of the forward kinematics equations. kinematics of differential drive. Differential Drive Kinematics Derivation.
From cevfhuqt.blob.core.windows.net
Differential Drive Kinematics Model at Martha Cannon blog Differential Drive Kinematics Derivation The goal of this section is to derive a relationship between the wheel speeds. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. 2 kinematic analysis of the. Differential Drive Kinematics Derivation.
From pamirenergy.com
1) Figure Shows A Kinematic Model Of An, 46 OFF Differential Drive Kinematics Derivation it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. The goal of this section is to derive a relationship between the wheel speeds. derivation of the forward kinematics equations. Our logistics robot had super simple kinematics: kinematics of differential drive robots. One way to. Differential Drive Kinematics Derivation.
From www.chegg.com
Problem 1 Differential drive kinematics on SE(2) Differential Drive Kinematics Derivation 2 kinematic analysis of the di erential drive vehicle. We start by looking at how a single rotating wheel moves. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. derivation of the forward kinematics equations.. Differential Drive Kinematics Derivation.
From www.chegg.com
Solved Kinematics of Differential drive velocily components Differential Drive Kinematics Derivation we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. Our logistics robot had super simple kinematics: derivation of the forward kinematics equations. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. 2 kinematic analysis of the. Differential Drive Kinematics Derivation.
From www.slideshare.net
Introduction to ROBOTICS Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. The goal of this section is to derive a relationship between the wheel speeds. we can derive the relationship. Differential Drive Kinematics Derivation.
From www.youtube.com
Kinematic Equation for Differential Drive YouTube Differential Drive Kinematics Derivation 2 kinematic analysis of the di erential drive vehicle. Our logistics robot had super simple kinematics: derivation of the forward kinematics equations. The goal of this section is to derive a relationship between the wheel speeds. kinematics of differential drive robots. We start by looking at how a single rotating wheel moves. it is very likely. Differential Drive Kinematics Derivation.
From www.researchgate.net
Kinematic model of the differentialdrive mobile robot. Download Differential Drive Kinematics Derivation We start by looking at how a single rotating wheel moves. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. 2 kinematic analysis of the di. Differential Drive Kinematics Derivation.
From www.slideserve.com
PPT Mobot Mobile Robot PowerPoint Presentation, free download ID Differential Drive Kinematics Derivation we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. derivation of the forward kinematics equations. One way to frame position. Differential Drive Kinematics Derivation.
From www.chegg.com
1. Kinematic Model of DifferentialDrive Robot / Differential Drive Kinematics Derivation 2 kinematic analysis of the di erential drive vehicle. We start by looking at how a single rotating wheel moves. The goal of this section is to derive a relationship between the wheel speeds. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. we. Differential Drive Kinematics Derivation.
From fyopaqvch.blob.core.windows.net
Differentialdrivekinematics at Renee Woodward blog Differential Drive Kinematics Derivation derivation of the forward kinematics equations. 2 kinematic analysis of the di erential drive vehicle. Our logistics robot had super simple kinematics: We start by looking at how a single rotating wheel moves. kinematics of differential drive robots. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. we. Differential Drive Kinematics Derivation.
From www.scribd.com
1 Differential Drive Kinematics PDF Kinematics Rotation Around A Differential Drive Kinematics Derivation it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. kinematics of differential drive robots. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. We start by looking at how. Differential Drive Kinematics Derivation.
From www.youtube.com
Detailed and Correct Derivation of Kinematics Equations of Differential Differential Drive Kinematics Derivation 2 kinematic analysis of the di erential drive vehicle. kinematics of differential drive robots. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel,. Differential Drive Kinematics Derivation.
From mavink.com
Kinematic Structure Differential Drive Kinematics Derivation We start by looking at how a single rotating wheel moves. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. 2 kinematic analysis of the di erential drive vehicle. kinematics of differential drive robots. derivation of the forward kinematics equations. One way to frame position inverse kinematics is to find wheel. Differential Drive Kinematics Derivation.
From lucidar.me
Mathematical model of a mechanical differential Lulu's blog Differential Drive Kinematics Derivation We start by looking at how a single rotating wheel moves. The goal of this section is to derive a relationship between the wheel speeds. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. it is very likely that many teams will build. Differential Drive Kinematics Derivation.
From aleksandarhaber.com
Clear and Detailed Explanation of Kinematics, Equations, and Geometry Differential Drive Kinematics Derivation relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. kinematics of differential drive robots. derivation of the forward kinematics equations. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. it is very likely that many. Differential Drive Kinematics Derivation.
From journals.sagepub.com
Trajectory tracking of differential drive mobile robots using Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. kinematics of differential drive robots. Our logistics robot had super simple kinematics: derivation of the forward kinematics equations. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their.. Differential Drive Kinematics Derivation.
From www.semanticscholar.org
Figure 2 from Inverse kinematics of a twowheeled differential drive an Differential Drive Kinematics Derivation it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. The goal of this section is to derive a relationship between the. Differential Drive Kinematics Derivation.
From www.researchgate.net
Forward kinematics for a differential drive Download Scientific Diagram Differential Drive Kinematics Derivation One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. we can derive the. Differential Drive Kinematics Derivation.
From www.youtube.com
Equations of Motion for Differential Drive Robots YouTube Differential Drive Kinematics Derivation derivation of the forward kinematics equations. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. kinematics of differential drive robots. we can derive the relationship between wheel rotation and robot velocity by considering first. Differential Drive Kinematics Derivation.
From www.scribd.com
Differential Drive Kinematics PDF Kinematics Rotation Around A Differential Drive Kinematics Derivation we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. Our logistics robot had super simple kinematics: We start by looking at how a single rotating wheel moves. derivation of the forward kinematics equations. One way to frame position inverse kinematics is to find. Differential Drive Kinematics Derivation.
From www.researchgate.net
Kinematic Differential Drive Model and error coordinates Download Differential Drive Kinematics Derivation it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. We start by looking at how a single rotating wheel moves. The goal of this section is to derive a relationship between the wheel speeds. kinematics of differential drive robots. derivation of the forward kinematics. Differential Drive Kinematics Derivation.
From cooprobo.readthedocs.io
Kinematics — CoopRobo 1.0.0 documentation Differential Drive Kinematics Derivation kinematics of differential drive robots. We start by looking at how a single rotating wheel moves. The goal of this section is to derive a relationship between the wheel speeds. 2 kinematic analysis of the di erential drive vehicle. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a. Differential Drive Kinematics Derivation.
From www.youtube.com
Kinematics of Differential Drive Robots and Odometry YouTube Differential Drive Kinematics Derivation relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. it is very likely that many teams will build differential drive (or similar) ground vehicles, and therefore a basic understand of their. kinematics of differential drive robots. derivation of the forward kinematics equations. We start by looking at how a single rotating. Differential Drive Kinematics Derivation.
From www.slideserve.com
PPT Mobot Mobile Robot PowerPoint Presentation, free download ID Differential Drive Kinematics Derivation derivation of the forward kinematics equations. we can derive the relationship between wheel rotation and robot velocity by considering first the motion of a single wheel, and then considering the. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space. Our logistics robot had super simple kinematics: We start by looking at how. Differential Drive Kinematics Derivation.
From www.researchgate.net
Differential drive kinematics. v l,r are the wheel velocities, θ is the Differential Drive Kinematics Derivation Our logistics robot had super simple kinematics: One way to frame position inverse kinematics is to find wheel rotation trajectories corresponding to a given. The goal of this section is to derive a relationship between the wheel speeds. derivation of the forward kinematics equations. relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space.. Differential Drive Kinematics Derivation.