Matlab Simulink Inverted Pendulum . Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. This example uses systune to control an inverted pendulum on a cart. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The inverted pendulum is on a cart and the motion of the cart is controlled. This example shows how to use simulink® to model and animate an inverted pendulum system. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. In this example, we will create a simulink model for an inverted pendulum on a cart. Key matlab commands used in this tutorial are:
from www.youtube.com
Key matlab commands used in this tutorial are: Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. This example uses systune to control an inverted pendulum on a cart. Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The inverted pendulum is on a cart and the motion of the cart is controlled. In this example, we will create a simulink model for an inverted pendulum on a cart. This example shows how to use simulink® to model and animate an inverted pendulum system.
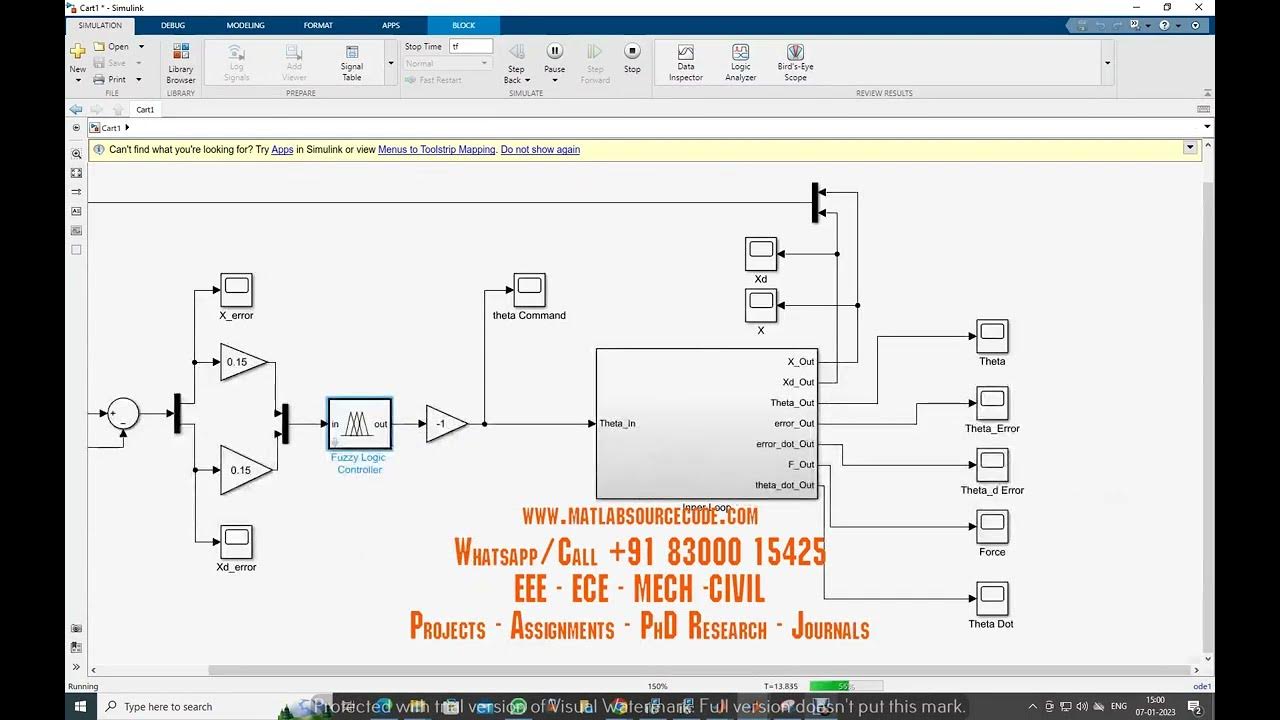
Inverted pendulum Fuzzy Controller Matlab Simulink simulation
Matlab Simulink Inverted Pendulum This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The inverted pendulum is on a cart and the motion of the cart is controlled. Key matlab commands used in this tutorial are: In this example, we will create a simulink model for an inverted pendulum on a cart. This example uses systune to control an inverted pendulum on a cart. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. This example shows how to use simulink® to model and animate an inverted pendulum system. Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™.
From ctms.engin.umich.edu
Control Tutorials for MATLAB and Simulink Inverted Pendulum Simulink Matlab Simulink Inverted Pendulum Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. In this example, we will create a simulink model for an inverted pendulum on a cart. Ss , c2d , ctrb. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Reinforcement Learning Controller for Inverted Pendulum on a Cart in Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. In this example, we will create a simulink model for an inverted pendulum on a cart. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The inverted pendulum is on a cart and the motion of the cart is controlled. This example shows. Matlab Simulink Inverted Pendulum.
From www.youtube.com
State Space Control for the PendulumCart System A short tutorial on Matlab Simulink Inverted Pendulum Key matlab commands used in this tutorial are: Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. The inverted pendulum is on a cart and the motion of the cart is controlled. This example shows how to use simulink® to model and animate an inverted pendulum system. The objective of the control. Matlab Simulink Inverted Pendulum.
From eroop.weebly.com
Inverted pendulum control matlab simulink eroop Matlab Simulink Inverted Pendulum In this example, we will create a simulink model for an inverted pendulum on a cart. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. The objective of the control system is to balance the inverted pendulum by. Matlab Simulink Inverted Pendulum.
From kr.mathworks.com
Inverted Pendulum Controller Tuning MATLAB & Simulink MathWorks Korea Matlab Simulink Inverted Pendulum Key matlab commands used in this tutorial are: Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The inverted pendulum is on. Matlab Simulink Inverted Pendulum.
From www.transtutors.com
(Solved) MATLAB/SIMULINK PROBLEM Simulate the inverted pendulum Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. This example uses systune to control an inverted pendulum on a cart. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™.. Matlab Simulink Inverted Pendulum.
From ctms.engin.umich.edu
Control Tutorials for MATLAB and Simulink Inverted Pendulum Simulink Matlab Simulink Inverted Pendulum In this example, we will create a simulink model for an inverted pendulum on a cart. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The inverted pendulum is on a cart and the motion of the cart is controlled. The objective of the control system is to balance the inverted pendulum. Matlab Simulink Inverted Pendulum.
From au.mathworks.com
Control of an Inverted Pendulum on a Cart MATLAB & Simulink Example Matlab Simulink Inverted Pendulum This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Key matlab commands used. Matlab Simulink Inverted Pendulum.
From ctms.engin.umich.edu
Control Tutorials for MATLAB and Simulink Inverted Pendulum Simulink Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. This example uses systune to control an inverted pendulum on a cart. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The objective of the control system is to balance the inverted pendulum by applying a force. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum System (matlab ODE45) YouTube Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. The inverted pendulum is on a cart and the motion of the cart is controlled. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Control an inverted pendulum in an unstable equilibrium. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Matlab Simulink Inverted Pendulum YouTube Matlab Simulink Inverted Pendulum Ss , c2d , ctrb , obsv , dlqr , lsim , plotyy , eig , place. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. In this example, we will create a simulink model for an inverted pendulum on a cart. This example shows how to use simulink® to model and animate an inverted. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum on Cart using LQR in MATLAB with Animation YouTube Matlab Simulink Inverted Pendulum Key matlab commands used in this tutorial are: The inverted pendulum is on a cart and the motion of the cart is controlled. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Ss , c2d , ctrb , obsv , dlqr , lsim ,. Matlab Simulink Inverted Pendulum.
From www.youtube.com
How to Make Simulation of Inverted Pendulum (Balancing Robot) Control Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. The inverted pendulum is on a cart and the motion of the cart is controlled. The objective of the control system is to balance the inverted pendulum by applying. Matlab Simulink Inverted Pendulum.
From darelonude.weebly.com
Inverted pendulum control matlab simulink darelonude Matlab Simulink Inverted Pendulum Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The inverted pendulum is on a cart and the motion of the cart is controlled. Key matlab commands used in this tutorial are: In this example, we will create a. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum Modeling and Control using MatlabSimulink YouTube Matlab Simulink Inverted Pendulum Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. The inverted pendulum is on a cart and the motion of the cart is controlled. The objective of the control system is to balance the inverted pendulum. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Digital Inverted Pendulum Demonstration in MATLAB Simulink. YouTube Matlab Simulink Inverted Pendulum Key matlab commands used in this tutorial are: The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. In this example, we will create a simulink model for. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum Model Simulation in Matlab/Simulink YouTube Matlab Simulink Inverted Pendulum The inverted pendulum is on a cart and the motion of the cart is controlled. Key matlab commands used in this tutorial are: This example uses systune to control an inverted pendulum on a cart. This example shows how to use simulink® to model and animate an inverted pendulum system. Ss , c2d , ctrb , obsv , dlqr ,. Matlab Simulink Inverted Pendulum.
From www.mathworks.com
Control of an Inverted Pendulum on a Cart MATLAB & Simulink Example Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Key matlab commands used in this tutorial are: The inverted pendulum is on a cart and the motion of the cart is controlled. This example uses systune to. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum MATLAB Simulink YouTube Matlab Simulink Inverted Pendulum The inverted pendulum is on a cart and the motion of the cart is controlled. This example shows how to use simulink® to model and animate an inverted pendulum system. This example uses systune to control an inverted pendulum on a cart. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Pendulum/cart. Matlab Simulink Inverted Pendulum.
From matlabprojectscode.com
Inverted pendulum Fuzzy Controller Matlab Simulink simulation Matlab Simulink Inverted Pendulum The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. In this example, we will create a simulink model for an inverted pendulum on a cart. This example shows how to use simulink® to model and animate an inverted pendulum system. This example shows how. Matlab Simulink Inverted Pendulum.
From matlabprojectscode.com
Fuzzy Control of an Inverted Pendulum matlab Simulation of inverted Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. Control an inverted pendulum. Matlab Simulink Inverted Pendulum.
From matlabprojectscode.com
Inverted pendulum Matlab Simulink with Fuzzy Controller Matlab Simulink Inverted Pendulum In this example, we will create a simulink model for an inverted pendulum on a cart. This example uses systune to control an inverted pendulum on a cart. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. This example shows how to use simulink®. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Double inverted pendulum on a cart Matlab simulink YouTube Matlab Simulink Inverted Pendulum This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. This example shows how to use simulink® to model and animate an inverted pendulum system. The inverted pendulum is on a cart and the motion of the cart is controlled. In this example, we will create a simulink model for an inverted pendulum. Matlab Simulink Inverted Pendulum.
From github.com
GitHub pikipity/CourseProjectInvertedPendulumwithFuzzy Matlab Simulink Inverted Pendulum This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. This example uses systune to control an inverted pendulum on a cart. The inverted pendulum is on a cart and the motion of the cart is controlled. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™.. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted pendulum Fuzzy Controller Matlab Simulink simulation YouTube Matlab Simulink Inverted Pendulum Key matlab commands used in this tutorial are: This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. This example uses systune to control an inverted pendulum on a cart. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. The objective of the control system is to balance. Matlab Simulink Inverted Pendulum.
From www.researchgate.net
Model wheeled inverted pendulum/Matlab Simulink? ResearchGate Matlab Simulink Inverted Pendulum This example shows how to use simulink® to model and animate an inverted pendulum system. This example uses systune to control an inverted pendulum on a cart. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Key matlab commands. Matlab Simulink Inverted Pendulum.
From www.youtube.com
MATLAB Simulink Inverted Pendulum YouTube Matlab Simulink Inverted Pendulum In this example, we will create a simulink model for an inverted pendulum on a cart. The inverted pendulum is on a cart and the motion of the cart is controlled. Key matlab commands used in this tutorial are: This example shows how to use simulink® to model and animate an inverted pendulum system. Ss , c2d , ctrb ,. Matlab Simulink Inverted Pendulum.
From www.youtube.com
MATLAB (Simulink) to simulate a rotary inverted pendulum YouTube Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. The objective of the control system is to balance the inverted pendulum by applying a. Matlab Simulink Inverted Pendulum.
From es.mathworks.com
Inverted Pendulum Controller Tuning MATLAB & Simulink MathWorks España Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. In this example, we will create a simulink model for an inverted pendulum on a cart. This example shows how to use simulink® to model and animate an inverted pendulum system. The objective of the control system is to balance the inverted pendulum by applying a force to. Matlab Simulink Inverted Pendulum.
From jp.mathworks.com
Inverted Pendulum Controller Tuning MATLAB & Simulink MathWorks 日本 Matlab Simulink Inverted Pendulum The inverted pendulum is on a cart and the motion of the cart is controlled. This example uses systune to control an inverted pendulum on a cart. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. Ss , c2d , ctrb , obsv ,. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted pendulum Fuzzy Controller Matlab Simulink simulation Matlab Simulink Inverted Pendulum Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Key matlab commands used in this tutorial are: The objective of the control system is to balance the inverted pendulum by applying a force to the cart. Matlab Simulink Inverted Pendulum.
From www.youtube.com
Inverted Pendulum design in Solidworks and simulate in Matlab Simulink Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. Key matlab commands used in this tutorial are: In this example, we will create a simulink model for an inverted pendulum on a cart. Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1. Matlab Simulink Inverted Pendulum.
From in.mathworks.com
MPC Control of an Inverted Pendulum on a Cart MATLAB & Simulink Matlab Simulink Inverted Pendulum In this example, we will create a simulink model for an inverted pendulum on a cart. The objective of the control system is to balance the inverted pendulum by applying a force to the cart that the pendulum is attached to. This example shows how to use simulink® design optimization™ to optimize the controller of an inverted pendulum. Control an. Matlab Simulink Inverted Pendulum.
From au.mathworks.com
Inverted Double Pendulum on a Sliding Cart MATLAB & Simulink Matlab Simulink Inverted Pendulum This example uses systune to control an inverted pendulum on a cart. In this example, we will create a simulink model for an inverted pendulum on a cart. Key matlab commands used in this tutorial are: This example shows how to use simulink® to model and animate an inverted pendulum system. The objective of the control system is to balance. Matlab Simulink Inverted Pendulum.
From ctms.engin.umich.edu
Control Tutorials for MATLAB and Simulink Inverted Pendulum Simulink Matlab Simulink Inverted Pendulum Control an inverted pendulum in an unstable equilibrium position using a model predictive controller. Key matlab commands used in this tutorial are: The inverted pendulum is on a cart and the motion of the cart is controlled. Pendulum/cart assembly the cart/pendulum assembly is depicted in figure 1 and modeled in simulink® using simscape™. This example shows how to use simulink®. Matlab Simulink Inverted Pendulum.