Quadruped Robot Leg Design . As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. This review explores the locomotion capabilities of quadruped robots. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the.
from hackaday.io
As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. This review explores the locomotion capabilities of quadruped robots. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints.
New leg design. Details Hackaday.io
Quadruped Robot Leg Design These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. This review explores the locomotion capabilities of quadruped robots. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,.
From www.mdpi.com
Applied Sciences Free FullText Design and Control of a OpenSource Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. Generally, quadruped robots have three dofs in each. Quadruped Robot Leg Design.
From forum.robotis.com
Design, Development and Control of a Quadruped Robot Research Papers Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. This review explores the locomotion capabilities of quadruped robots. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway. Quadruped Robot Leg Design.
From www.researchgate.net
3D model of quadruped robot. Download Scientific Diagram Quadruped Robot Leg Design These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. This review explores the locomotion capabilities of quadruped robots. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. As the most critical movement. Quadruped Robot Leg Design.
From www.instructables.com
DIY Spot Like Quadruped Robot 7 Steps Instructables Quadruped Robot Leg Design As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. This review explores. Quadruped Robot Leg Design.
From grabcad.com
Free CAD Designs, Files & 3D Models The GrabCAD Community Library Quadruped Robot Leg Design This review explores the locomotion capabilities of quadruped robots. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. In this article, we have presented a novel method for designing fully. Quadruped Robot Leg Design.
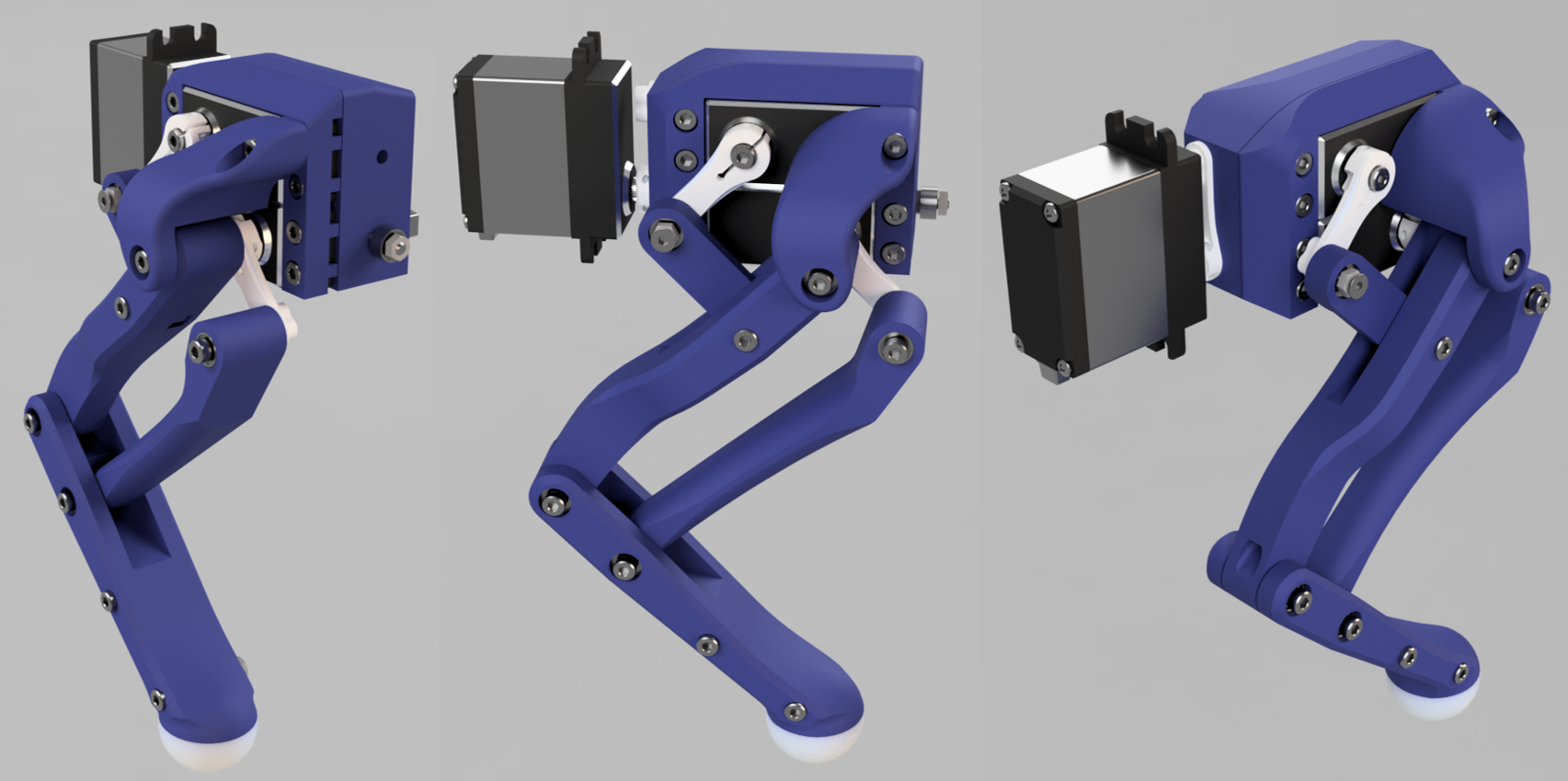
From hackaday.com
Compliant Quadruped Legs Using Servos Hackaday Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. This review explores the locomotion capabilities of quadruped robots. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In design of quadruped robot's legs, joint movements are simulated by. Quadruped Robot Leg Design.
From www.totallynotevilrobotarmy.com
Totally Not Evil Robot Army Mojo3 A Compliant Quadruped Robot Dog Quadruped Robot Leg Design Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Conventional legs for quadruped robot are facing. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design This review explores the locomotion capabilities of quadruped robots. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns,. Quadruped Robot Leg Design.
From goit.science
Quadruped Robot Leg Prototype Go IT Quadruped Robot Leg Design The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. This review explores. Quadruped Robot Leg Design.
From deepai.org
Review of Quadruped Robots for Dynamic DeepAI Quadruped Robot Leg Design The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. This review explores the locomotion capabilities of quadruped robots. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints.. Quadruped Robot Leg Design.
From www.mdpi.com
Applied Sciences Free FullText Leg Trajectory Planning for Quadruped Robot Leg Design This review explores the locomotion capabilities of quadruped robots. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. The quadruped robot based on tensegrity legs is capable of dynamic. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design This review explores the locomotion capabilities of quadruped robots. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns,. Quadruped Robot Leg Design.
From www.youtube.com
Quadruped Robot Basics YouTube Quadruped Robot Leg Design It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. This review explores the locomotion capabilities of quadruped robots. As. Quadruped Robot Leg Design.
From peerj.com
Wholebody kinematic and dynamic modeling for quadruped robot under Quadruped Robot Leg Design Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. In. Quadruped Robot Leg Design.
From www.youtube.com
Quadruped robot updated front legs mechanics YouTube Quadruped Robot Leg Design As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. These. Quadruped Robot Leg Design.
From www.mdpi.com
Applied Sciences Free FullText A WheelsonKnees Quadruped Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. Generally, quadruped robots have three. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. Conventional legs for quadruped robot are facing problems such as. Quadruped Robot Leg Design.
From www.mdpi.com
Sensors Free FullText A Quadruped Robot with ThreeDimensional Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and. Quadruped Robot Leg Design.
From www.epfl.ch
Quadruped Robotics ‒ BioRob ‐ EPFL Quadruped Robot Leg Design In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. Generally, quadruped robots have three dofs in each leg and. Quadruped Robot Leg Design.
From www.mdpi.com
Actuators Free FullText Leg Configuration Analysis and Prototype Quadruped Robot Leg Design In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. This review explores the locomotion capabilities of quadruped robots. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In this article, we have. Quadruped Robot Leg Design.
From is.mpg.de
Comparing the effect of different spine and leg designs for a small Quadruped Robot Leg Design It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. The quadruped robot based on tensegrity legs is capable of dynamic morphology,. Quadruped Robot Leg Design.
From github.com
GitHub JackDemeter/quadrupedrobot Quadruped Robot for capstone project Quadruped Robot Leg Design As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. The quadruped robot based on tensegrity legs is. Quadruped Robot Leg Design.
From www.semanticscholar.org
Figure 1 from Mechanical design of a compact and dexterous quadruped Quadruped Robot Leg Design This review explores the locomotion capabilities of quadruped robots. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. In this. Quadruped Robot Leg Design.
From am.is.mpg.de
Animalinspired robot legs Dynamic Max Planck Institute Quadruped Robot Leg Design These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. This review explores the locomotion capabilities of quadruped robots. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. As the most critical movement unit of a quadruped robot, the limb leg unit. Quadruped Robot Leg Design.
From br.pinterest.com
Leg design for HyQ, the Hydraulically actuated Quadruped robot by IIT Quadruped Robot Leg Design To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. This review explores the. Quadruped Robot Leg Design.
From www.semanticscholar.org
Figure 2 from Mechanical design of a compact and dexterous quadruped Quadruped Robot Leg Design Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. This review explores the locomotion capabilities of quadruped robots. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. It covers different aspects of quadruped robots like types of legs, leg design,. Quadruped Robot Leg Design.
From hackaday.io
New leg design. Details Hackaday.io Quadruped Robot Leg Design In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. It covers different aspects of quadruped robots like types of legs, leg design, gait patterns, and their mathematical formulations, and types of motions like omnidirectional motion and body sway motion. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. To meet the stability requirements for moving quadruped robots, it is important to design a rational structure for a single leg and. This review explores the locomotion capabilities of quadruped robots. In this article, we have presented a novel method for designing fully compliant legs for quadruped. Quadruped Robot Leg Design.
From www.pinterest.com
HyQ robotic Lipizzaner does more than just prance Mechanical design Quadruped Robot Leg Design The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. This review explores the locomotion capabilities of quadruped robots. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. In design of quadruped robot's legs, joint movements. Quadruped Robot Leg Design.
From robohub.org
Fourlegged robot that efficiently handles challenging terrain Robohub Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors.. Quadruped Robot Leg Design.
From engineeringdesignfair.ucalgary.ca
Multifunctional Quadruped Robot Feet Engineering Design Fair 2022 Quadruped Robot Leg Design Generally, quadruped robots have three dofs in each leg and two dofs in their hip joints. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. These hip joints are used to achieve lateral crossing and. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can adjust leg length to. As the most critical movement unit of a quadruped robot, the limb leg unit (llu) directly affects movement speed and reliability,. This review explores the locomotion capabilities of quadruped robots. In this article, we have presented a novel method for. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. In design of quadruped robot's legs, joint movements are simulated by incorporating dofs. This review explores the locomotion capabilities of quadruped robots. The quadruped robot based on tensegrity legs is capable of dynamic morphology, which means it can. Quadruped Robot Leg Design.
From journals.sagepub.com
Analysis and research of quadruped robot’s legs A comprehensive review Quadruped Robot Leg Design Conventional legs for quadruped robot are facing problems such as heavy load and high energy consumption of motors. In this article, we have presented a novel method for designing fully compliant legs for quadruped robots, which is based on the. These hip joints are used to achieve lateral crossing and forward/backward swinging of the robot. This review explores the locomotion. Quadruped Robot Leg Design.