Standard Basis Vectors For R2 . — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. This is sometimes known as the standard basis. index > matrix algebra. Is the vector form of newton’s. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): In particular, \(\mathbb{r}^n \) has dimension \(n\). Is called the standard basis of the. ilarly we can use vectors to measure both velocity and acceleration. a natural basis of r2 is given by the vectors [1; — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. form a basis for \(\mathbb{r}^n \).
from www.numerade.com
— a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. ilarly we can use vectors to measure both velocity and acceleration. In particular, \(\mathbb{r}^n \) has dimension \(n\). a natural basis of r2 is given by the vectors [1; index > matrix algebra. Is the vector form of newton’s. This is sometimes known as the standard basis. Is called the standard basis of the. form a basis for \(\mathbb{r}^n \). the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular):
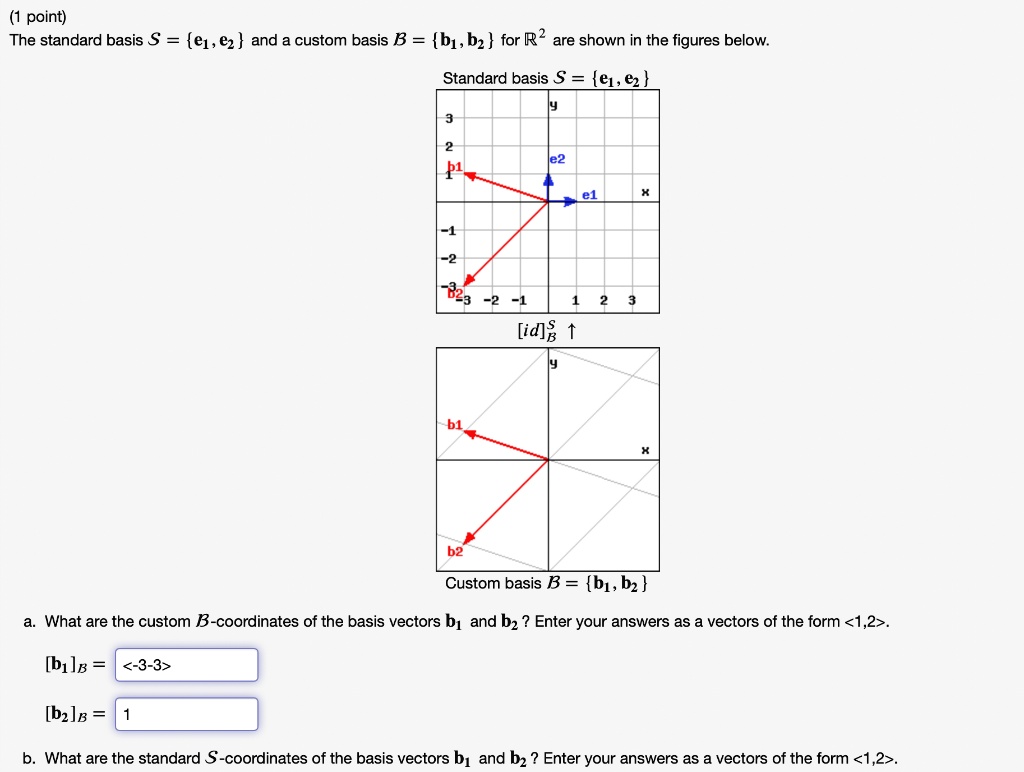
SOLVED point) The standard basis S = e1, e2 and custom basis B = b1,bz
Standard Basis Vectors For R2 Is called the standard basis of the. Is the vector form of newton’s. This is sometimes known as the standard basis. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): Is called the standard basis of the. — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. form a basis for \(\mathbb{r}^n \). index > matrix algebra. In particular, \(\mathbb{r}^n \) has dimension \(n\). a natural basis of r2 is given by the vectors [1; — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. ilarly we can use vectors to measure both velocity and acceleration.
From www.youtube.com
Standard Basis Vectors i, j, k YouTube Standard Basis Vectors For R2 Is the vector form of newton’s. This is sometimes known as the standard basis. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): Is called the standard basis of the. ilarly we can use vectors to measure both velocity and acceleration. index > matrix algebra. form a basis for \(\mathbb{r}^n \).. Standard Basis Vectors For R2.
From calcworkshop.com
Basis of Vector Spaces (A Linear Algebra Guide) Standard Basis Vectors For R2 This is sometimes known as the standard basis. Is the vector form of newton’s. ilarly we can use vectors to measure both velocity and acceleration. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): a natural basis of r2 is given by the vectors [1; Is called the standard basis of the.. Standard Basis Vectors For R2.
From www.chegg.com
Solved Let B be the basis of R2 consisting of the vectors Standard Basis Vectors For R2 Is the vector form of newton’s. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. ilarly we can use vectors to measure both velocity and acceleration. Is called the standard basis of the. In particular, \(\mathbb{r}^n \) has dimension \(n\). This is sometimes known as the standard basis. — a standard basis, also. Standard Basis Vectors For R2.
From www.slideserve.com
PPT Vectors PowerPoint Presentation, free download ID568692 Standard Basis Vectors For R2 This is sometimes known as the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). form a basis for \(\mathbb{r}^n \). index > matrix algebra. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. ilarly we can. Standard Basis Vectors For R2.
From www.chegg.com
Solved (a) Explain why (i l 2 is a basis for R2, and write Standard Basis Vectors For R2 form a basis for \(\mathbb{r}^n \). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. ilarly we can use vectors to measure both velocity and acceleration. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. the standard basis. Standard Basis Vectors For R2.
From www.chegg.com
Solved Bases and Dimension 9. What is the standard basis Standard Basis Vectors For R2 — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. form a basis for \(\mathbb{r}^n \). In particular, \(\mathbb{r}^n \) has dimension \(n\). index > matrix algebra. ilarly we can use vectors to measure both velocity and acceleration. — a standard basis, also called a natural basis, is a special orthonormal vector. Standard Basis Vectors For R2.
From calcworkshop.com
Basis of Vector Spaces (A Linear Algebra Guide) Standard Basis Vectors For R2 Is the vector form of newton’s. form a basis for \(\mathbb{r}^n \). index > matrix algebra. In particular, \(\mathbb{r}^n \) has dimension \(n\). a natural basis of r2 is given by the vectors [1; ilarly we can use vectors to measure both velocity and acceleration. Is called the standard basis of the. This is sometimes known. Standard Basis Vectors For R2.
From www.chegg.com
Solved Consider the following three bases for R2 standard Standard Basis Vectors For R2 Is called the standard basis of the. ilarly we can use vectors to measure both velocity and acceleration. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): This is sometimes known as the standard basis. form a basis for \(\mathbb{r}^n \). In particular, \(\mathbb{r}^n \) has dimension \(n\). index > matrix. Standard Basis Vectors For R2.
From www.youtube.com
12.2 Part 7/8 Quick Introduction to Standard Basis Vector & Unit Standard Basis Vectors For R2 a natural basis of r2 is given by the vectors [1; — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. Is the vector form of newton’s. ilarly we can use. Standard Basis Vectors For R2.
From www.youtube.com
Vectors Part 1 Equation of Line in R2 IMPORTANT Vector, Parametric Standard Basis Vectors For R2 index > matrix algebra. This is sometimes known as the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): ilarly. Standard Basis Vectors For R2.
From study.com
Standard Unit Vector & Standard Basis Vector Overview & Examples Standard Basis Vectors For R2 Is called the standard basis of the. — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): . Standard Basis Vectors For R2.
From www.numerade.com
SOLVED point) The standard basis S = e1, e2 and custom basis B = b1,bz Standard Basis Vectors For R2 This is sometimes known as the standard basis. — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. form a basis for \(\mathbb{r}^n \). index > matrix algebra. a natural. Standard Basis Vectors For R2.
From www.youtube.com
CalcBLUE 1 Ch. 4.3 Standard Basis Vectors YouTube Standard Basis Vectors For R2 In particular, \(\mathbb{r}^n \) has dimension \(n\). form a basis for \(\mathbb{r}^n \). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. ilarly we can use vectors to measure both velocity and acceleration. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at. Standard Basis Vectors For R2.
From seankarunveer.blogspot.com
15+ find a vector equation and parametric equations for the line Standard Basis Vectors For R2 — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): Is called the standard basis of the. Is the vector form of newton’s. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n. Standard Basis Vectors For R2.
From www.youtube.com
The Standard Basis Vectors YouTube Standard Basis Vectors For R2 index > matrix algebra. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. This is sometimes known as the standard basis. form a basis for \(\mathbb{r}^n \). Is called the standard basis of the. — a standard. Standard Basis Vectors For R2.
From zief0002.github.io
Chapter 16 Basis Vectors and Matrices Matrix Algebra for Educational Standard Basis Vectors For R2 a natural basis of r2 is given by the vectors [1; This is sometimes known as the standard basis. index > matrix algebra. ilarly we can use vectors to measure both velocity and acceleration. In particular, \(\mathbb{r}^n \) has dimension \(n\). Is the vector form of newton’s. — a standard basis, also called a natural basis,. Standard Basis Vectors For R2.
From www.youtube.com
Calc 2, Unit Vectors and Standard Basis Vectors YouTube Standard Basis Vectors For R2 — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. a natural basis of r2 is given by the vectors [1; Is the vector form of newton’s. This is sometimes known as the standard basis. form a basis for \(\mathbb{r}^n \). the standard basis. Standard Basis Vectors For R2.
From www.geeksforgeeks.org
Basis Vectors in Linear Algebra ML Standard Basis Vectors For R2 ilarly we can use vectors to measure both velocity and acceleration. This is sometimes known as the standard basis. — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. form a basis for \(\mathbb{r}^n \). index > matrix algebra. Is the vector form of. Standard Basis Vectors For R2.
From zief0002.github.io
Chapter 16 Basis Vectors and Matrices Matrix Algebra for Educational Standard Basis Vectors For R2 ilarly we can use vectors to measure both velocity and acceleration. Is the vector form of newton’s. form a basis for \(\mathbb{r}^n \). a natural basis of r2 is given by the vectors [1; Is called the standard basis of the. In particular, \(\mathbb{r}^n \) has dimension \(n\). the standard basis vectors are \(\textit{orthogonal}\) (in other. Standard Basis Vectors For R2.
From www.chegg.com
Solved Let B be the basis of R2 consisting of the vectors Standard Basis Vectors For R2 — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. a natural basis of r2 is given by the vectors [1; the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): ilarly we can use vectors to measure both velocity and acceleration. form a basis for \(\mathbb{r}^n \).. Standard Basis Vectors For R2.
From www.youtube.com
Linear Algebra Finding a basis for a line in R^2 YouTube Standard Basis Vectors For R2 the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): form a basis for \(\mathbb{r}^n \). This is sometimes known as the standard basis. Is the vector form of newton’s. In particular, \(\mathbb{r}^n \) has dimension \(n\). Is called the standard basis of the. — a standard basis, also called a natural basis,. Standard Basis Vectors For R2.
From solvedlib.com
Point) Let B be the basis of R2 consisting of the vec… SolvedLib Standard Basis Vectors For R2 — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. This is sometimes known as the standard basis. ilarly we can use vectors to measure both velocity and acceleration. — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. form a. Standard Basis Vectors For R2.
From www.numerade.com
SOLVED Consider the basis B of R2 consisting of the vectors 3 2 6 Standard Basis Vectors For R2 — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. Is called the standard basis of the. In particular, \(\mathbb{r}^n \) has dimension \(n\). form a basis for \(\mathbb{r}^n \). a natural basis of r2 is given by the vectors [1; index > matrix. Standard Basis Vectors For R2.
From quizlet.com
Let S be the standard basis for R2, and let B = {v1, v2} be Quizlet Standard Basis Vectors For R2 Is called the standard basis of the. This is sometimes known as the standard basis. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): ilarly we can use vectors to measure both velocity and acceleration. form a basis for \(\mathbb{r}^n \). index > matrix algebra. — a standard basis, also. Standard Basis Vectors For R2.
From math.stackexchange.com
linear algebra Why use Transpose notation in standart basis vectors Standard Basis Vectors For R2 This is sometimes known as the standard basis. ilarly we can use vectors to measure both velocity and acceleration. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. index > matrix algebra. a natural basis of r2. Standard Basis Vectors For R2.
From dxoijtcqt.blob.core.windows.net
Standard Basis Vectors I And J at Edna Jones blog Standard Basis Vectors For R2 a natural basis of r2 is given by the vectors [1; the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. Is called the standard basis of the. Is the vector form of newton’s. This is sometimes known as the. Standard Basis Vectors For R2.
From www.chegg.com
Solved Let Be The Standard Basis In R2 And Be Another Bas... Standard Basis Vectors For R2 Is the vector form of newton’s. ilarly we can use vectors to measure both velocity and acceleration. index > matrix algebra. form a basis for \(\mathbb{r}^n \). In particular, \(\mathbb{r}^n \) has dimension \(n\). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a.. Standard Basis Vectors For R2.
From www.youtube.com
Tutorial Q78 Basis in vector space of 2x2 matrices YouTube Standard Basis Vectors For R2 This is sometimes known as the standard basis. a natural basis of r2 is given by the vectors [1; Is called the standard basis of the. Is the vector form of newton’s. In particular, \(\mathbb{r}^n \) has dimension \(n\). index > matrix algebra. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular):. Standard Basis Vectors For R2.
From www.slideserve.com
PPT Geometry of R 2 and R 3 PowerPoint Presentation, free download Standard Basis Vectors For R2 form a basis for \(\mathbb{r}^n \). Is called the standard basis of the. a natural basis of r2 is given by the vectors [1; In particular, \(\mathbb{r}^n \) has dimension \(n\). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. the standard basis. Standard Basis Vectors For R2.
From www.youtube.com
L1 8 Standard Basis Vectors YouTube Standard Basis Vectors For R2 Is the vector form of newton’s. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): This is sometimes known as the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). a natural basis of r2 is given by the vectors [1; — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a. Standard Basis Vectors For R2.
From solvedlib.com
Let e1,e2, e3 be the standard basis vectors in R3 and… SolvedLib Standard Basis Vectors For R2 This is sometimes known as the standard basis. the standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): In particular, \(\mathbb{r}^n \) has dimension \(n\). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. — then the collection \(\left\{\vec{e}_1, \vec{e}_2,. Standard Basis Vectors For R2.
From www.numerade.com
point) A set of two, three, or four red vectors in R2 'or R? is shown Standard Basis Vectors For R2 Is called the standard basis of the. ilarly we can use vectors to measure both velocity and acceleration. index > matrix algebra. form a basis for \(\mathbb{r}^n \). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. Is the vector form of newton’s.. Standard Basis Vectors For R2.
From www.chegg.com
Solved Do the given vectors form an orthogonal basis for R2? Standard Basis Vectors For R2 — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. Is called the standard basis of the. This is sometimes known as the standard basis. — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. Is the vector form of newton’s. form. Standard Basis Vectors For R2.
From www.slideserve.com
PPT Fun with Vectors PowerPoint Presentation, free download ID3127161 Standard Basis Vectors For R2 Is the vector form of newton’s. This is sometimes known as the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. form a basis for \(\mathbb{r}^n \). ilarly we can use vectors to measure both velocity and acceleration. a natural basis of r2. Standard Basis Vectors For R2.
From zief0002.github.io
Chapter 16 Basis Vectors and Matrices Matrix Algebra for Educational Standard Basis Vectors For R2 — then the collection \(\left\{\vec{e}_1, \vec{e}_2, \cdots, \vec{e}_n \right\}\) is a basis for. ilarly we can use vectors to measure both velocity and acceleration. In particular, \(\mathbb{r}^n \) has dimension \(n\). form a basis for \(\mathbb{r}^n \). — a standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis. Standard Basis Vectors For R2.