Servo Motor Duty Cycle Control . The longer the duty cycle, the farther. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. Control servo motors with the raspberry pi pico programmed with micropython. Servo motors are easy to control. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servos are controlled by pulse width, the pulse width determines the horn angle. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle A pulse width of 1500 µs moves the servo. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°.
from www.globalspec.com
By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. Control servo motors with the raspberry pi pico programmed with micropython. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle A pulse width of 1500 µs moves the servo. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. Servo motors are easy to control. Servos are controlled by pulse width, the pulse width determines the horn angle.
Servo MotorWorking Principle GlobalSpec
Servo Motor Duty Cycle Control A typical servo responds to pulse widths in the range 1000 to 2000 µs. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. Servo motors are easy to control. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle A typical servo responds to pulse widths in the range 1000 to 2000 µs. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. The longer the duty cycle, the farther. A pulse width of 1500 µs moves the servo. Servos are controlled by pulse width, the pulse width determines the horn angle. Control servo motors with the raspberry pi pico programmed with micropython.
From backyardbrains.com
Experiment Controlling the Claw Servo Motor Duty Cycle Control You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. A typical servo responds to pulse widths in the range 1000 to 2000 µs. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. Servo motors. Servo Motor Duty Cycle Control.
From vhdlwhiz.com
RC servo controller using PWM from an FPGA pin VHDLwhiz Servo Motor Duty Cycle Control Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. The longer the duty cycle, the farther. A pulse width of 1500 µs moves the servo. For example, if. Servo Motor Duty Cycle Control.
From howtomechatronics.com
Arduino Brushless Motor Control Tutorial ESC BLDC How To Mechatronics Servo Motor Duty Cycle Control For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. The longer the duty cycle, the farther. You can also use pulse width modulation to. Servo Motor Duty Cycle Control.
From www.circuits-diy.com
Servo Motor Driver Circuit Servo Motor Duty Cycle Control The longer the duty cycle, the farther. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servo motors are easy to control. Control servo motors with the raspberry pi pico programmed with micropython. Servos are controlled by pulse width, the pulse width determines the horn angle. “duty cycle” is the width of positive pulse (square. Servo Motor Duty Cycle Control.
From www.baumueller.com
Servohydraulics Conversion to servohydraulic drives Servo Motor Duty Cycle Control A pulse width of 1500 µs moves the servo. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. Servo motors are easy to control. You can also use pulse width modulation to control. Servo Motor Duty Cycle Control.
From www.engineersgarage.com
Controlling Servo Motor with Stm32f103 microcontroller using Servo Motor Duty Cycle Control Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle Servos are controlled by pulse width, the pulse width determines the horn angle. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. For example, if you have. Servo Motor Duty Cycle Control.
From www.firgelliauto.com
What is DUTY CYCLE in a linear actuator? FIRGELLI Servo Motor Duty Cycle Control The longer the duty cycle, the farther. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. Control servo motors with the raspberry pi pico programmed with micropython. Servos. Servo Motor Duty Cycle Control.
From microcontrollerslab.com
DC Motor Speed Control using Pic microcontroller PWM method Servo Motor Duty Cycle Control “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. Servos are controlled by pulse width, the pulse width determines the horn angle. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. Servo motors are easy to control. You can. Servo Motor Duty Cycle Control.
From circuitdigest.com
How to Control Servo Motor with Arduino, Full Explanation with Code and Servo Motor Duty Cycle Control Servos are controlled by pulse width, the pulse width determines the horn angle. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. A. Servo Motor Duty Cycle Control.
From exoxqkwcp.blob.core.windows.net
Elevator Duty Cycle at Dena Reyes blog Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. Control servo motors with the raspberry pi pico programmed with micropython. A pulse width of 1500 µs moves the servo. You can also use pulse width modulation to control the angle of a servo motor attached. Servo Motor Duty Cycle Control.
From iam-publicidad.org
tödlich männlich Produkt servo motor römisch speichern Offen Servo Motor Duty Cycle Control A pulse width of 1500 µs moves the servo. Servo motors are easy to control. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the. Servo Motor Duty Cycle Control.
From www.pinterest.co.uk
Sg90 servo motor pwm signal requirements duty cycle and frequency Servo Motor Duty Cycle Control Servos are controlled by pulse width, the pulse width determines the horn angle. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. Control servo motors with the raspberry pi pico programmed with micropython. You can also use pulse width modulation to control the angle of a servo motor. Servo Motor Duty Cycle Control.
From ceeizfao.blob.core.windows.net
Rc Servo Duty Cycle at Derek Gregory blog Servo Motor Duty Cycle Control Control servo motors with the raspberry pi pico programmed with micropython. Servos are controlled by pulse width, the pulse width determines the horn angle. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. “duty cycle” is the width of positive pulse (square wave) and a deciding. Servo Motor Duty Cycle Control.
From dev.to
ESP32 Standard Library Embedded Rust PWM Servo Motor Sweep DEV Community Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. A pulse width of 1500 µs moves the servo. The longer the duty. Servo Motor Duty Cycle Control.
From jp.robotshop.com
ServoCity HeavyDuty Linear Servo (Position Control, 1224V, 112lb Servo Motor Duty Cycle Control Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu). Servo Motor Duty Cycle Control.
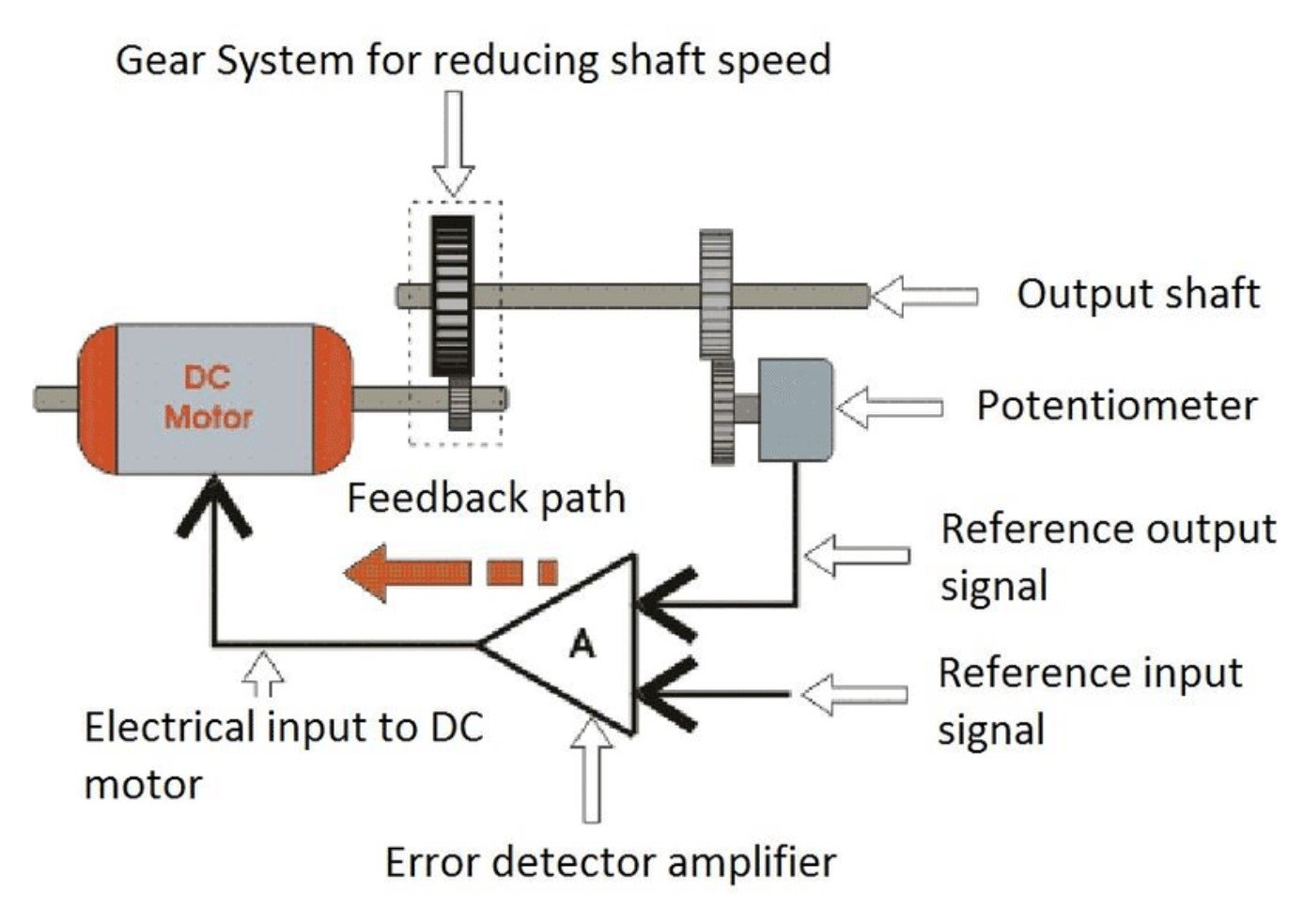
From www.brainkart.com
DC Servo Motor Control Systems Servo Motor Duty Cycle Control The longer the duty cycle, the farther. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. Servo motors are easy to control. Servos are controlled by pulse width, the pulse width determines the horn angle. Control servo motors with the raspberry pi pico programmed with. Servo Motor Duty Cycle Control.
From www.learnrobotics.org
How to Control a Servo with Raspberry Pi Learn Robotics Servo Motor Duty Cycle Control Servos are controlled by pulse width, the pulse width determines the horn angle. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle A pulse width of 1500 µs moves the. Servo Motor Duty Cycle Control.
From exyirhrmx.blob.core.windows.net
How Is Duty Cycle Measured at Marilyn Reid blog Servo Motor Duty Cycle Control Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A typical servo. Servo Motor Duty Cycle Control.
From blog.wokwi.com
Learn to Control Servo motor using PWM Wokwi Style Servo Motor Duty Cycle Control Control servo motors with the raspberry pi pico programmed with micropython. Servo motors are easy to control. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. A typical servo responds. Servo Motor Duty Cycle Control.
From www.circuitbread.com
What is a Pulse Width Modulation (PWM) signal? CircuitBread Servo Motor Duty Cycle Control A typical servo responds to pulse widths in the range 1000 to 2000 µs. Servo motors are easy to control. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the. Servo Motor Duty Cycle Control.
From www.celeramotion.com
Efficiency and Power in Servo Drives Ingenia Servo Drives Servo Motor Duty Cycle Control Servo motors are easy to control. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle A pulse width of 1500 µs moves the servo. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. A typical servo responds. Servo Motor Duty Cycle Control.
From www.electronicwings.com
Servo Motor Basics, Working principle & interfacing with Arduino Servo Motor Duty Cycle Control A pulse width of 1500 µs moves the servo. You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. The longer the duty cycle, the farther. Servos are controlled by pulse width, the pulse width determines the horn angle. Control servo motors sg90 and the s0009. Servo Motor Duty Cycle Control.
From www.youtube.com
PLC Servo Motor Control Servo Drive Wiring Modes Programming Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. For example, if you have a servo with 180° turn, then 90° is. Servo Motor Duty Cycle Control.
From electronics.stackexchange.com
motor Duty cycle calculation Electrical Engineering Stack Exchange Servo Motor Duty Cycle Control By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. A pulse width of 1500 µs moves the servo. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. The longer the duty cycle, the farther. A typical servo. Servo Motor Duty Cycle Control.
From www.engineersgarage.com
Interfacing Tower Pro SG90 9G servo motor with 8051(89c51, 89c52 Servo Motor Duty Cycle Control Control servo motors with the raspberry pi pico programmed with micropython. A typical servo responds to pulse widths in the range 1000 to 2000 µs. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle For example, if you have a servo with 180° turn, then 90° is the center position of. Servo Motor Duty Cycle Control.
From infosys.beckhoff.com
Duty cycle evaluation Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. Control servo motors with the raspberry pi pico programmed with micropython. For example, if you have a servo. Servo Motor Duty Cycle Control.
From ceeizfao.blob.core.windows.net
Rc Servo Duty Cycle at Derek Gregory blog Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. Servos are controlled by pulse width, the pulse width determines the horn angle. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse.. Servo Motor Duty Cycle Control.
From www.globalspec.com
Servo MotorWorking Principle GlobalSpec Servo Motor Duty Cycle Control You can think of the duty cycle as a percentage of time that the servo is receiving a high signal from the raspberry pi. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. Control servo motors with the raspberry pi pico programmed with micropython. The longer. Servo Motor Duty Cycle Control.
From www.wexterhome.com
Control de Servomotor con Arduino Programar y Conectar un Servo Servo Motor Duty Cycle Control Servo motors are easy to control. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. A typical servo responds to pulse widths in the range 1000 to 2000 µs. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a. Servo Motor Duty Cycle Control.
From alfacomp.net
Servo motor Servo Motor Duty Cycle Control By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. Servo motors are easy to control. Control servo motors sg90 and the s0009 using pwm signals to move with precision to a certain angle For example, if you have a servo with 180° turn, then 90° is. Servo Motor Duty Cycle Control.
From www.motec.co.uk
Duty Cycles Motor Technology Limited Servo Motor Duty Cycle Control By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. “duty cycle” is the width of positive pulse (square wave) and a deciding factor. Servo Motor Duty Cycle Control.
From makersportal.com
Raspberry Pi Camera Panning with a Servo Motor — Maker Portal Servo Motor Duty Cycle Control A typical servo responds to pulse widths in the range 1000 to 2000 µs. You can also use pulse width modulation to control the angle of a servo motor attached to something mechanical like a robot arm. Servos are controlled by pulse width, the pulse width determines the horn angle. The longer the duty cycle, the farther. “duty cycle” is. Servo Motor Duty Cycle Control.
From circuitspedia.com
Arduino Servo Motor Control Using Potentiometer Push Button Servo Motor Duty Cycle Control A typical servo responds to pulse widths in the range 1000 to 2000 µs. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. You can also use pulse width modulation. Servo Motor Duty Cycle Control.
From www.researchgate.net
The block diagram of AC servomotor control Download Scientific Diagram Servo Motor Duty Cycle Control “duty cycle” is the width of positive pulse (square wave) and a deciding factor for servo’s angular position. A pulse width of 1500 µs moves the servo. For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. You can also use pulse width modulation to control the angle of. Servo Motor Duty Cycle Control.
From deepbluembedded.com
Servo motor control with pic microcontroller SG90 MG90s MPLAB XC8 Servo Motor Duty Cycle Control For example, if you have a servo with 180° turn, then 90° is the center position of the servo with 0°. By integrating a motor, driver, encoder, and electronics into a single unit, the motor can be controlled by a microcontroller (mcu) using pulse. Servo motors are easy to control. You can also use pulse width modulation to control the. Servo Motor Duty Cycle Control.