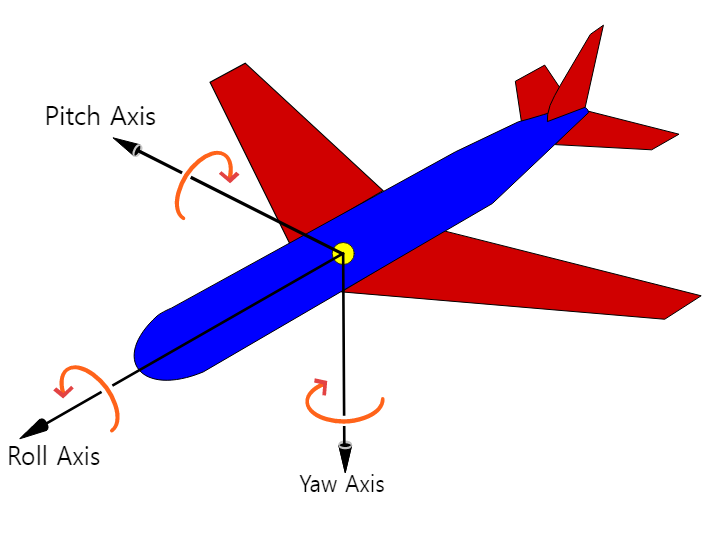
Yaw Pitch Roll Formula . In a previous project i used a adxl345 accelerometer from. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. The two axes of the horizontal plane are. Each rotation matrix is a simple extension of the 2d rotation matrix. The yaw, pitch and roll rotations can be. Formula for yaw, pitch, roll rotation. Roll pitch yaw (rpy) convention. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? I am using the following formulas at the moment, but i. Below as a picture to illustrate the definition. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a.
from velog.io
Below as a picture to illustrate the definition. Each rotation matrix is a simple extension of the 2d rotation matrix. I am using the following formulas at the moment, but i. In a previous project i used a adxl345 accelerometer from. The two axes of the horizontal plane are. The yaw, pitch and roll rotations can be. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Formula for yaw, pitch, roll rotation. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a.
Rotation Yaw, Pitch, Roll
Yaw Pitch Roll Formula Roll pitch yaw (rpy) convention. Each rotation matrix is a simple extension of the 2d rotation matrix. Formula for yaw, pitch, roll rotation. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I am using the following formulas at the moment, but i. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Roll pitch yaw (rpy) convention. The two axes of the horizontal plane are. The yaw, pitch and roll rotations can be. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. In a previous project i used a adxl345 accelerometer from. Below as a picture to illustrate the definition. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix?
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Formula Roll pitch yaw (rpy) convention. Formula for yaw, pitch, roll rotation. Each rotation matrix is a simple extension of the 2d rotation matrix. The yaw, pitch and roll rotations can be. Below as a picture to illustrate the definition. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The two axes of the horizontal. Yaw Pitch Roll Formula.
From www.youtube.com
What is the total value of Yaw and Roll moment on vehicle Yaw Pitch Roll Formula How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Roll pitch yaw (rpy) convention. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The yaw, pitch and roll rotations can be. Below as a picture to illustrate the definition. Each rotation matrix is a simple extension of. Yaw Pitch Roll Formula.
From velog.io
Rotation Yaw, Pitch, Roll Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The two axes of the horizontal plane are. Formula for yaw, pitch, roll rotation.. Yaw Pitch Roll Formula.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Formula Formula for yaw, pitch, roll rotation. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Each rotation matrix is a simple extension of. Yaw Pitch Roll Formula.
From www.grc.nasa.gov
Rocket Rotations Yaw Pitch Roll Formula Each rotation matrix is a simple extension of the 2d rotation matrix. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Formula for yaw, pitch, roll rotation. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? I am using the following formulas at the moment, but i.. Yaw Pitch Roll Formula.
From answers.opencv.org
Retrieve yaw, pitch, roll from rvec OpenCV Q&A Forum Yaw Pitch Roll Formula Pitch, roll and yaw are defined as the rotation around x, y and z axis. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? In a previous project i used a adxl345 accelerometer from. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Each. Yaw Pitch Roll Formula.
From aleksandarhaber.com
Clear Graphical and Mathematical Explanation of Yaw, Pitch and Roll Yaw Pitch Roll Formula To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The two axes of the horizontal plane are. Below as a picture to illustrate the definition. Formula for yaw, pitch, roll rotation. Roll pitch yaw (rpy). Yaw Pitch Roll Formula.
From howthingsfly.si.edu
Pitch, Roll, and Yaw How Things Fly Yaw Pitch Roll Formula Roll pitch yaw (rpy) convention. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Pitch, roll. Yaw Pitch Roll Formula.
From www.researchgate.net
Definition of yaw and pitch rotations from zeroDoppler coordinate Yaw Pitch Roll Formula How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0 of angle g + rotation about y0 of. Yaw Pitch Roll Formula.
From www.slideserve.com
PPT Rotações e Quatérnios PowerPoint Presentation, free download ID Yaw Pitch Roll Formula Below as a picture to illustrate the definition. Each rotation matrix is a simple extension of the 2d rotation matrix. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The two axes of the horizontal plane are. Formula for yaw, pitch, roll rotation. The yaw, pitch and roll rotations can be. Rotation about x0. Yaw Pitch Roll Formula.
From www.freepik.es
Roll, pitch, yaw tres ángulos de rotación correspondientes a los Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. The two axes of the horizontal plane are. I am using the following formulas at the moment, but i. The yaw, pitch and roll rotations can be. Roll pitch yaw (rpy) convention. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of. Yaw Pitch Roll Formula.
From www.pinterest.com
Roll Pitch Yaw Aviation, Geometry formulas, Schemes Yaw Pitch Roll Formula I am using the following formulas at the moment, but i. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about. Yaw Pitch Roll Formula.
From www.researchgate.net
Yaw angle δ and pitch angle γ for deflection and slope of the toroidal Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. Below as a picture to illustrate the definition. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. The yaw, pitch and roll rotations can be. To. Yaw Pitch Roll Formula.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Yaw Pitch Roll Formula The yaw, pitch and roll rotations can be. The two axes of the horizontal plane are. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw. Yaw Pitch Roll Formula.
From www.researchgate.net
Roll, Pitch, and Yaw Control Moments for Forward Flight and Hover Yaw Pitch Roll Formula The two axes of the horizontal plane are. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. Below as a picture to illustrate the definition. To define roll, pitch, and yaw in linear systems, we first. Yaw Pitch Roll Formula.
From www.showme.com
2.7.2 roll pitch yaw angles Science, Kinematics ShowMe Yaw Pitch Roll Formula I am using the following formulas at the moment, but i. Roll pitch yaw (rpy) convention. The yaw, pitch and roll rotations can be. Below as a picture to illustrate the definition. Each rotation matrix is a simple extension of the 2d rotation matrix. Formula for yaw, pitch, roll rotation. In a previous project i used a adxl345 accelerometer from.. Yaw Pitch Roll Formula.
From www.alamy.es
Roll pitch y yaw el plano del movimiento de cada canal semicircular Yaw Pitch Roll Formula I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. In a previous project i used a adxl345 accelerometer from. Each rotation matrix is a simple extension of the 2d rotation matrix. Formula for yaw, pitch, roll. Yaw Pitch Roll Formula.
From www.slideserve.com
PPT Robot Kinematics II PowerPoint Presentation ID579636 Yaw Pitch Roll Formula How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Formula for yaw, pitch, roll rotation. Below as a picture to illustrate the definition. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The two axes of the horizontal plane are. Each rotation matrix is a simple extension. Yaw Pitch Roll Formula.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll Formula How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? The yaw, pitch and roll rotations can be. In a previous project i used a adxl345 accelerometer from. Below as a picture to illustrate the definition. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The two axes. Yaw Pitch Roll Formula.
From www.youtube.com
Explicación de los Ángulos ROLLPITCHYAW mediante la solución de un Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. I am using the following formulas at the moment, but i. Each rotation matrix is a simple extension of the 2d rotation matrix. The two axes of the horizontal plane are. The yaw, pitch and roll rotations can be. Rotation about x0 of angle g + rotation about y0 of. Yaw Pitch Roll Formula.
From www.alamyimages.fr
Pitch Roll Yaw Photo Stock Alamy Yaw Pitch Roll Formula I am using the following formulas at the moment, but i. Below as a picture to illustrate the definition. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and. Yaw Pitch Roll Formula.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Formula Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer from. I am using the following formulas at the moment, but i. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: The yaw, pitch and roll rotations can be. Roll pitch yaw (rpy) convention.. Yaw Pitch Roll Formula.
From blog.csdn.net
关于pitch、roll、 yaw的示意图和Laya.Quaternion.createFromYawPitchRoll用法CSDN博客 Yaw Pitch Roll Formula Pitch, roll and yaw are defined as the rotation around x, y and z axis. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: The two axes of the horizontal plane are. Formula for yaw, pitch, roll rotation. I am using the following formulas at the moment, but i. How can. Yaw Pitch Roll Formula.
From space.stackexchange.com
artificial satellite Determine Yaw, Pitch, Roll from two vectors Yaw Pitch Roll Formula Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. I am using the following formulas at. Yaw Pitch Roll Formula.
From highsierrapilots.club
rollpitchyawdiagram High Sierra Pilots Yaw Pitch Roll Formula Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Below as a picture to illustrate the definition. Formula for yaw, pitch, roll rotation. I am using the following formulas at the moment, but i. I'm trying to figure out how to transform a pose given with euler angles roll. Yaw Pitch Roll Formula.
From www.youtube.com
Lecture 2 2.3 Roll, Pitch, Yaw angles (Robotics UTEC 20181) YouTube Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. Below as a picture to illustrate the definition. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I am using the following formulas at the moment, but i. I'm trying to figure out how to transform a pose given with euler. Yaw Pitch Roll Formula.
From postcompetitiveinsight.com
Pitch, Yaw, and Roll POST COMPETITIVE INSIGHT Yaw Pitch Roll Formula The yaw, pitch and roll rotations can be. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Pitch, roll and yaw are defined as the rotation around x, y and z axis. Roll pitch yaw (rpy) convention. I am using the following formulas at the moment, but i. Each rotation matrix. Yaw Pitch Roll Formula.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll Formula In a previous project i used a adxl345 accelerometer from. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I am using the following formulas at the moment, but i. Rotation about x0 of angle. Yaw Pitch Roll Formula.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Formula The two axes of the horizontal plane are. The yaw, pitch and roll rotations can be. Below as a picture to illustrate the definition. Each rotation matrix is a simple extension of the 2d rotation matrix. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis),. Yaw Pitch Roll Formula.
From www.researchgate.net
Definition of pitch, roll, and yaw degrees of freedom. Download Yaw Pitch Roll Formula Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. In a previous project i used a adxl345 accelerometer from. Pitch, roll and yaw are defined as the rotation around x, y and z axis. The two axes of the horizontal plane are. Formula for yaw, pitch, roll rotation. Each. Yaw Pitch Roll Formula.
From www.youtube.com
UE5 Blueprints Tutorial 0123 Roll, Pitch, Yaw (R, P, Y)ロール・ピッチ・ヨー Yaw Pitch Roll Formula To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: I am using the following formulas at the moment, but i. The yaw, pitch and roll rotations can be. Roll pitch yaw (rpy) convention. Below as a picture to illustrate the definition. The two axes of the horizontal plane are. I'm trying. Yaw Pitch Roll Formula.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Formula I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. The yaw, pitch and roll rotations can be. How can i calculate the roll, pitch and yaw angles associated with a homogeneous transformation matrix? Each rotation matrix. Yaw Pitch Roll Formula.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Formula I am using the following formulas at the moment, but i. Pitch, roll and yaw are defined as the rotation around x, y and z axis. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Formula for yaw, pitch, roll rotation. I'm trying to figure out how to transform a pose. Yaw Pitch Roll Formula.
From oer.pressbooks.pub
Aircraft Equations of Motion Introduction to Aerospace Flight Vehicles Yaw Pitch Roll Formula Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Roll pitch yaw (rpy) convention. I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. To define. Yaw Pitch Roll Formula.
From www.researchgate.net
Screenshot of an applet to visualize the relationship of yawpitchroll Yaw Pitch Roll Formula I'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y axis), and yaw (left handed around z axis) from the. To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: Each rotation matrix is a simple extension of the. Yaw Pitch Roll Formula.