Robotic Arm Theory . Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper.
from geonhee-lee.github.io
Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. In this article, we will discuss the. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm.
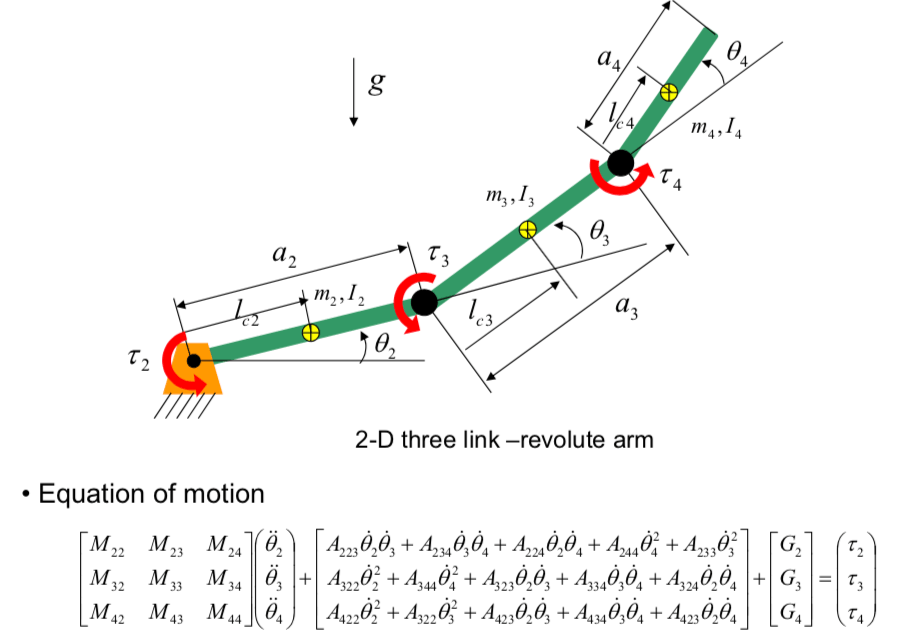
Robot Dynamics & control Lecture 1 Introduction GeonheeLee
Robotic Arm Theory An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. In this article, we will discuss the. Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°.
From www.pinterest.com
robotic arms Google Search Robot arm, Robot, Arms Robotic Arm Theory Learn about servo motors & why it is used in robotics. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. The base. Robotic Arm Theory.
From jmor.com
How to Program a Robot Arm Robotic Arm Theory In this article, we will discuss the. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. An articulated robot. Robotic Arm Theory.
From www.printables.com
PAROL6 3D printed desktop robotic arm da PCrnjak Scarica il modello Robotic Arm Theory An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. Understanding the geometry of a robot arm. Robotic Arm Theory.
From www.researchgate.net
The structure of the robotic arm with hybrid kinematic chains Robotic Arm Theory A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Understanding the geometry of a robot arm. Robotic Arm Theory.
From www.scribd.com
A Robotic Arm Using Pneumatic Movers PDF PDF Robotics Control Theory Robotic Arm Theory A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit. In this article, we will discuss the. Understanding the geometry of a robot arm is essential to control. Robotic Arm Theory.
From www.researchgate.net
Design model of the lightweight robot arm Download Scientific Diagram Robotic Arm Theory The base is an anchor point that supports the unit. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics.. Robotic Arm Theory.
From www.mdpi.com
Machines Free FullText Dynamic Modeling Method of Multibody System Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow,. Robotic Arm Theory.
From www.facebook.com
Forward Kinematics of UR5e 6R Robot Arm from Universal Robots Part of Robotic Arm Theory The base is an anchor point that supports the unit. In this article, we will discuss the. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. Understanding the geometry of a robot arm is essential to control. Robotic Arm Theory.
From www.mdpi.com
Sensors Free FullText Vibration Measurements on a SixAxis Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. The base is an anchor point that supports the unit. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Learn about servo motors & why it. Robotic Arm Theory.
From arctosrobotics.com
DIY 3D printed robotic arm ARCTOS Robotic Arm Theory In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Learn about servo motors & why it is used in robotics. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Understanding the geometry of a robot arm is essential to. Robotic Arm Theory.
From www.mdpi.com
Applied Sciences Free FullText Optimal Robot Motion for Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. In this article, we will discuss. Robotic Arm Theory.
From www.handla.it
Actual Robotic One is a highperformance robotic arm you can construct Robotic Arm Theory Learn about servo motors & why it is used in robotics. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. A look at the robotic arm. Robotic Arm Theory.
From ubicaciondepersonas.cdmx.gob.mx
Axis Industrial Robot Arm Manipulator With Stepper Motor Line Automatic Robotic Arm Theory The base is an anchor point that supports the unit. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics.. Robotic Arm Theory.
From robocademy.com
Robot Kinematics in a Nutshell Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit. Learn about servo motors & why it is used in robotics. A look at the robotic arm mechanism (servo mechanics) and. Robotic Arm Theory.
From www.researchgate.net
Conceptual design of the surgical robot system. Download Scientific Robotic Arm Theory The base is an anchor point that supports the unit. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. In this article, we will discuss the. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. Understanding the geometry of a robot arm is essential to control and manipulate it effectively.. Robotic Arm Theory.
From spectrum.ieee.org
Things You Can Do With an Extra Robotic Arm Robotic Arm Theory In this article, we will discuss the. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper.. Robotic Arm Theory.
From www.youtube.com
The Big Bang Theory Howard's Robot Arm [4x01] YouTube Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. In this article, we will discuss the. The base is an anchor point that supports the unit. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. An articulated robot. Robotic Arm Theory.
From circuitdigest.com
Hand Gesture Controlled Robotic Arm using Arduino Nano Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. In this article, we will discuss. Robotic Arm Theory.
From geonhee-lee.github.io
Robot Dynamics & control Lecture 1 Introduction GeonheeLee Robotic Arm Theory The base is an anchor point that supports the unit. Learn about servo motors & why it is used in robotics. In this article, we will discuss the. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. An articulated robot. Robotic Arm Theory.
From www.cgtrader.com
Robotic Arm 3D model animated CGTrader Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. In this article,. Robotic Arm Theory.
From www.microcontrollertips.com
Developing a mixed safetycritical IIoT robotic arm Robotic Arm Theory In this article, we will discuss the. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. A look at. Robotic Arm Theory.
From www.lupon.gov.ph
No Minimum Axis Oem Multipurpose Robot/robotic Kuka Robot Arm Model Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. The base is an anchor point that supports the unit. Learn about servo motors. Robotic Arm Theory.
From www.printables.com
PAROL6 3D printed desktop robotic arm da PCrnjak Scarica il modello Robotic Arm Theory An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. In this article, we will discuss the. The base is an anchor point that supports the unit. Learn about servo motors & why it is used in robotics. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Consider a robotic. Robotic Arm Theory.
From reachrobotics.com
‘Degrees of Freedom’ Vs ‘Functions’ of a Robotic Arm Reach Robotics Robotic Arm Theory The base is an anchor point that supports the unit. Learn about servo motors & why it is used in robotics. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. In this article, we will discuss the.. Robotic Arm Theory.
From sharynahlin.blogspot.com
industrial robotics fundamentals theory and applications 3rd edition Robotic Arm Theory Learn about servo motors & why it is used in robotics. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit. Consider a robotic. Robotic Arm Theory.
From www.scribd.com
Robotic Arm PDF Control Theory Programmable Logic Controller Robotic Arm Theory A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit.. Robotic Arm Theory.
From www.cgtrader.com
Robot Arm 3D model rigged CGTrader Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. Learn about servo motors & why it is used in robotics. The base is an anchor point that supports the unit. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. An articulated robot is composed of the. Robotic Arm Theory.
From www.youtube.com
4 Axis Robotic Arm M01 YouTube Robotic Arm Theory An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. In this article, we will discuss the. The base is an anchor point that supports the unit. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. Learn about servo motors & why it is used in robotics.. Robotic Arm Theory.
From www.semanticscholar.org
Efficient Design and Implementation of 4Degree of Freedom Robotic Arm Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. In this article, we will discuss the. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. The base is an anchor point that supports the unit.. Robotic Arm Theory.
From www.roboticmagazine.com
Lightweight Robotic Arm Roboticmagazine Robotic Arm Theory Learn about servo motors & why it is used in robotics. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. The base is an anchor point that supports the unit. Understanding the geometry of a robot arm is essential to control and manipulate it effectively. In this article, we will discuss the. Consider a robotic. Robotic Arm Theory.
From www.autodesk.com
Robotic Arm Autodesk Community Gallery Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up. Robotic Arm Theory.
From www.iqsdirectory.com
Automation System What Is It? How Is It Used? Advantages Robotic Arm Theory Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. The base is an anchor point that supports the unit. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up. Robotic Arm Theory.
From www.pinterest.ca
Pin on Mechanical Robots Industrial Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. A look at the robotic arm mechanism (servo mechanics) and the parts that make up a robot arm. In this article, we will discuss the. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. Learn about servo motors & why. Robotic Arm Theory.
From www.researchgate.net
4 DOF robotic arm. a Schematic of the robot. b A sample of Yaskawa Robotic Arm Theory Understanding the geometry of a robot arm is essential to control and manipulate it effectively. Learn about servo motors & why it is used in robotics. In this article, we will discuss the. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. A look at the robotic arm mechanism (servo mechanics) and the parts that. Robotic Arm Theory.
From sketchfab.com
ROBOTIC ARM Download Free 3D model by Spasevski Art (SpasevskiArt Robotic Arm Theory The base is an anchor point that supports the unit. In this article, we will discuss the. Consider a robotic arm with joint angles θ₁ = 30° and θ₂ = 45°. An articulated robot is composed of the base, shoulder, elbow, spherical wrist, and gripper. A look at the robotic arm mechanism (servo mechanics) and the parts that make up. Robotic Arm Theory.