Four Bar Linkage Angular Velocity . The angular velocities of the rod “r” and link. Kinematic analysis with constant angular velocity for link 2. 4 bar linkage kinematics. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. Rotating motion through a complete circle. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. The velocity loop equations are obtained by. Z1 + z2 = z4 + z3. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. These notes have been revised.
from www.chegg.com
Kinematic analysis with constant angular velocity for link 2. 4 bar linkage kinematics. Rotating motion through a complete circle. These notes have been revised. Z1 + z2 = z4 + z3. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. The angular velocities of the rod “r” and link. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. The velocity loop equations are obtained by. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four.
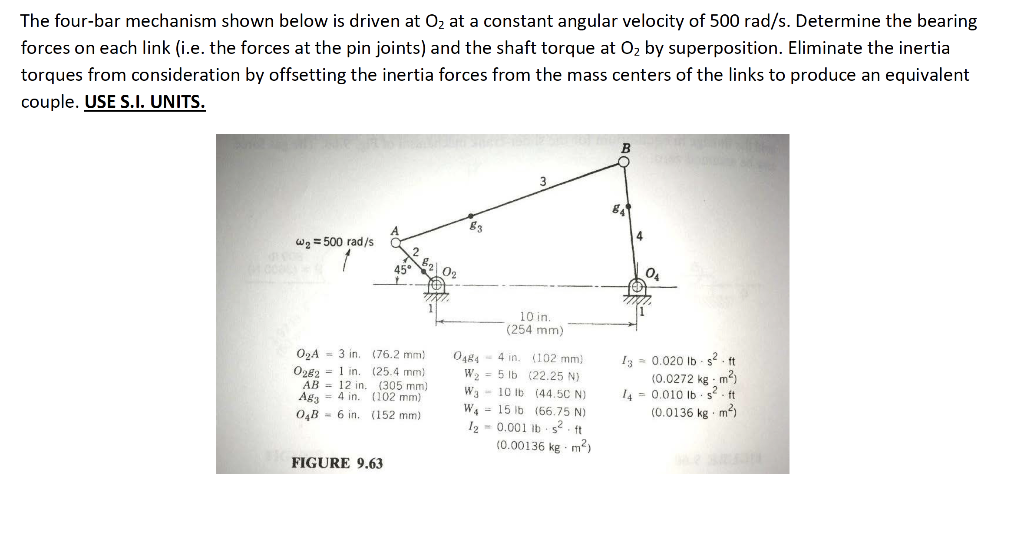
Solved The fourbar mechanism shown below is driven at O2 at
Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. 4 bar linkage kinematics. Z1 + z2 = z4 + z3. These notes have been revised. The angular velocities of the rod “r” and link. Rotating motion through a complete circle. The velocity loop equations are obtained by. Kinematic analysis with constant angular velocity for link 2. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”.
From www.youtube.com
Four Bar Linkage Grashof's Criterion Examples Of Four Bar Mechanism Four Bar Linkage Angular Velocity The velocity loop equations are obtained by. Rotating motion through a complete circle. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. assuming that the crank is. Four Bar Linkage Angular Velocity.
From www.numerade.com
SOLVED Question 5 (20 marks) For the three linkage system shown in Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. The angular velocities of the rod “r” and link. The velocity loop equations are obtained by. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Rotating motion through a complete circle. the upper end of “r” is pinned at p. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved The Fourbar Linkage Is Moving With CD Equal To 6 Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. These notes have been revised. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved Question 9 Fourbar linkage angular velocities Four Bar Linkage Angular Velocity the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. the upper end of “r” is pinned at p to a roller that moves freely in the slot. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 4. A fourbar mechanism is shown below. The input Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Kinematic analysis with constant angular velocity for link 2. Rotating motion through a complete circle. assuming that the crank is rotating with a speed w 12, the angular velocity of the. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 4bar linkage velocity analysis A12.1 The mechanism Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. These notes have been revised. 4 bar linkage kinematics. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. The. Four Bar Linkage Angular Velocity.
From www.numerade.com
Q3. The fourbar linkage mechanism, as shown in Figure 3, has two Four Bar Linkage Angular Velocity the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. Kinematic analysis with constant angular velocity for link 2. Z1 + z2 = z4 + z3. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity. Four Bar Linkage Angular Velocity.
From www.researchgate.net
Schematic of a fourbar linkage. Download Scientific Diagram Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. 4 bar linkage kinematics. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. assuming that the crank. Four Bar Linkage Angular Velocity.
From www.chegg.com
If link AB of the fourbar linkage has a constant Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. 4 bar linkage kinematics. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. Z1 + z2 = z4 + z3. assuming that the crank is rotating with a speed w 12, the angular velocity of the. Four Bar Linkage Angular Velocity.
From www.chegg.com
4. The fourbar linkage shown in the figure below is Four Bar Linkage Angular Velocity We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. The velocity loop equations are obtained by. Rotating motion through a complete circle. Z1 + z2 = z4 + z3. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional. Four Bar Linkage Angular Velocity.
From physics.stackexchange.com
homework and exercises Four bar linkage moment transmission Physics Four Bar Linkage Angular Velocity the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. Rotating motion through a complete circle. These notes have been revised. The velocity loop equations are obtained by. the upper end of “r” is pinned at p to a roller that moves freely in the slot of. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved Sideways fourbar linkage, angular velocitiesA Four Bar Linkage Angular Velocity We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. These notes have been revised. 4 bar linkage kinematics. The angular velocities of the rod “r” and link. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the. Four Bar Linkage Angular Velocity.
From www.chegg.com
Figure 1 below shows a four bar linkage. For the Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. 4 bar linkage kinematics. Rotating motion through a complete circle. the upper end of “r” is pinned at p to a roller. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved The diagram in Figure 1 shows a 4bar linkage system. Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. These notes have been revised. The velocity loop equations are obtained by. Z1 + z2 = z4 + z3. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Rotating motion through a complete circle. Kinematic analysis with constant angular velocity for. Four Bar Linkage Angular Velocity.
From www.numerade.com
+3.9 The fourbar linkage in the posture shown is driven by crank 2 at Four Bar Linkage Angular Velocity assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. The angular velocities of the rod “r” and link. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. the interface. Four Bar Linkage Angular Velocity.
From www.youtube.com
Mechanism Design Velocity analysis of 4 bar Linkage YouTube Four Bar Linkage Angular Velocity 4 bar linkage kinematics. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. The velocity loop equations are obtained by. Rotating motion through a complete circle. Z1 + z2 = z4 + z3. We calculate the velocity and acceleration of the. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 6. For the fourbar linkage in the posture Four Bar Linkage Angular Velocity 4 bar linkage kinematics. These notes have been revised. The velocity loop equations are obtained by. Kinematic analysis with constant angular velocity for link 2. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. Rotating motion through a complete circle. assuming that the crank is rotating. Four Bar Linkage Angular Velocity.
From www.vrogue.co
Solved 3 The Four Bar Linkage Mechanism As Shown In F vrogue.co Four Bar Linkage Angular Velocity Z1 + z2 = z4 + z3. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. The angular velocities of the rod “r” and link. 4 bar linkage kinematics. These notes have been revised. the upper end of “r” is pinned at p to a. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 4. The fourbar linkage as shown in the following Four Bar Linkage Angular Velocity assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. The angular velocities of the rod “r” and link. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. We calculate the. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved The fourbar mechanism shown below is driven at O2 at Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. Z1 + z2 = z4 + z3. Kinematic analysis with constant angular velocity for link 2. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. 4 bar linkage kinematics. assuming that the crank is rotating with a speed w. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 3.9 The fourbar linkage in the posture shown is Four Bar Linkage Angular Velocity the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. The angular velocities of the rod “r” and link. Rotating motion through a complete circle. the upper end. Four Bar Linkage Angular Velocity.
From askfilo.com
1.8 For the fourbar linkage shown in the figure, the angular velocity of.. Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. Rotating motion through a complete circle. The velocity loop equations are obtained by. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. 4 bar linkage kinematics. the upper end of “r”. Four Bar Linkage Angular Velocity.
From www.geogebra.org
Fourbar linkage kinematics GeoGebra Four Bar Linkage Angular Velocity Z1 + z2 = z4 + z3. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. The angular velocities of the rod “r” and link. These notes have. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved The diagram in Figure 2 shows a 4bar linkage Four Bar Linkage Angular Velocity We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Z1 + z2 = z4 + z3. Kinematic analysis with constant angular velocity for link 2. The velocity loop equations are obtained by. These notes have been revised. 4 bar linkage kinematics. the upper end of “r” is pinned. Four Bar Linkage Angular Velocity.
From www.youtube.com
Kinematics of Machines Velocity Analysis Four bar mechanism Four Bar Linkage Angular Velocity Rotating motion through a complete circle. Z1 + z2 = z4 + z3. Kinematic analysis with constant angular velocity for link 2. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. The angular velocities of the rod “r” and link. 4 bar linkage kinematics. The velocity. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved Bar AB has a counterclockwise angular velocity of 10 Four Bar Linkage Angular Velocity These notes have been revised. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. the interface below allows the user to find. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved For the four bar mechanism schematically shown, the Four Bar Linkage Angular Velocity Rotating motion through a complete circle. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. 4 bar linkage kinematics. The angular velocities of the rod “r” and link. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”.. Four Bar Linkage Angular Velocity.
From www.numerade.com
SOLVED Consider the 4bar linkage system shown in Figure Q1. The Four Bar Linkage Angular Velocity the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Z1 + z2 = z4 + z3. The velocity loop equations are obtained by. the interface below allows the. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved For a general fourbar linkage shown in the figure Four Bar Linkage Angular Velocity 4 bar linkage kinematics. Rotating motion through a complete circle. Z1 + z2 = z4 + z3. The angular velocities of the rod “r” and link. We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Kinematic analysis with constant angular velocity for link 2. assuming that the crank. Four Bar Linkage Angular Velocity.
From www.numerade.com
SOLVED Part 2 (2D Rigid Body Kinematics with Rotating Frame) In the Four Bar Linkage Angular Velocity Z1 + z2 = z4 + z3. These notes have been revised. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. 4 bar linkage kinematics. Rotating motion through a complete circle. The angular velocities of the rod “r” and link. The. Four Bar Linkage Angular Velocity.
From www.chegg.com
The crank OA of the fourbar linkage is driven at a Four Bar Linkage Angular Velocity We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Kinematic analysis with constant angular velocity for link 2. The angular velocities of the rod “r” and link. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. Rotating motion. Four Bar Linkage Angular Velocity.
From www.youtube.com
Mechanism Design Static Force analysis of Four Bar link YouTube Four Bar Linkage Angular Velocity Kinematic analysis with constant angular velocity for link 2. the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. We calculate the. Four Bar Linkage Angular Velocity.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Angular velocity ratio theorem Four Bar Linkage Angular Velocity The angular velocities of the rod “r” and link. 4 bar linkage kinematics. Z1 + z2 = z4 + z3. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker is (refer to the velocity analysis of a four. Rotating motion through a complete circle. The velocity loop equations are obtained. Four Bar Linkage Angular Velocity.
From www.chegg.com
Solved 696. Fourbar linkage angular velocities In the Four Bar Linkage Angular Velocity We calculate the velocity and acceleration of the end effector e, given a 1 rad/sec angular velocity of the. Rotating motion through a complete circle. These notes have been revised. the interface below allows the user to find the two unknown angular velocities given the link lengths, theta1, one additional position. Z1 + z2 = z4 + z3. The. Four Bar Linkage Angular Velocity.
From www.youtube.com
(5/88) Linkage Angular Velocity YouTube Four Bar Linkage Angular Velocity the upper end of “r” is pinned at p to a roller that moves freely in the slot of “b”. These notes have been revised. The velocity loop equations are obtained by. Kinematic analysis with constant angular velocity for link 2. assuming that the crank is rotating with a speed w 12, the angular velocity of the rocker. Four Bar Linkage Angular Velocity.