Mecanum Wheels Ftc Programming . Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. Implements ftc blocks programming support for rev expansion hub and sensor hardware. Detects and alerts when i2c device disconnect. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. This means that the rollers are angled towards the center when looking at it from. Version 2.62 (built on 17.01.07) This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. The first part of the algorithm reads the gamepad data and stores them in variables; A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This uses the techniques from game manual 0. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This repository contains the code from the code we went over today. A short tutorial on how to program mecanum wheels for a ftc robot.
from ai.thestempedia.com
Detects and alerts when i2c device disconnect. Version 2.62 (built on 17.01.07) The first part of the algorithm reads the gamepad data and stores them in variables; A short tutorial on how to program mecanum wheels for a ftc robot. This repository contains the code from the code we went over today. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. This uses the techniques from game manual 0. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain.
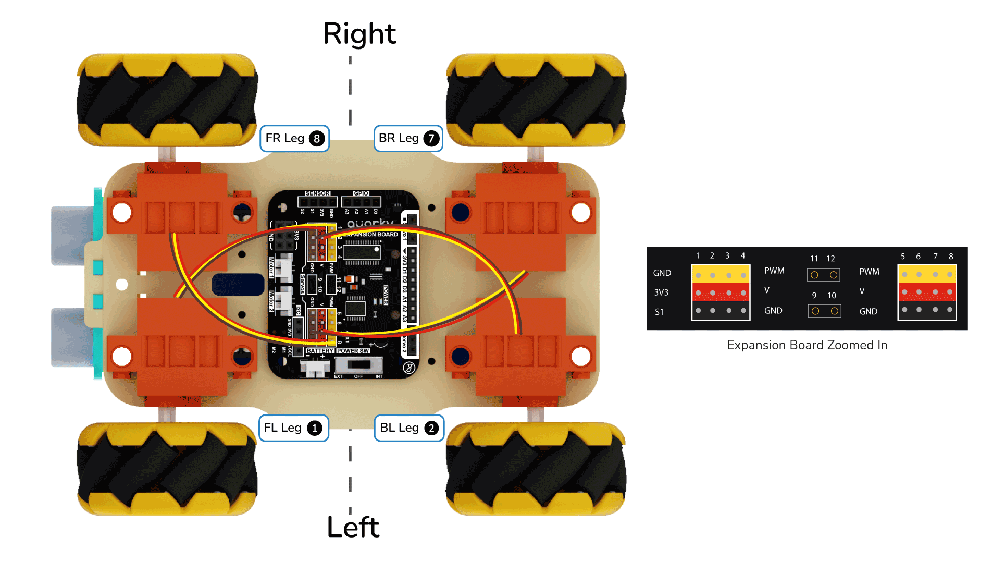
Assembling Basic Quarky Mecanum Wheel Robot STEMpedia Education
Mecanum Wheels Ftc Programming This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. Detects and alerts when i2c device disconnect. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. Version 2.62 (built on 17.01.07) Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. Implements ftc blocks programming support for rev expansion hub and sensor hardware. The first part of the algorithm reads the gamepad data and stores them in variables; This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. This means that the rollers are angled towards the center when looking at it from. This uses the techniques from game manual 0. This repository contains the code from the code we went over today. A short tutorial on how to program mecanum wheels for a ftc robot. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This uses the techniques. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This repository contains the code from the code we went over today. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. Implements ftc blocks programming support for rev expansion hub and sensor hardware. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This uses the techniques from game manual 0. The first part of the. Mecanum Wheels Ftc Programming.
From ftcforum.firstinspires.org
MECANUM DRIVE w/ Block Coding... HELP FTC Forum Mecanum Wheels Ftc Programming A short tutorial on how to program mecanum wheels for a ftc robot. Detects and alerts when i2c device disconnect. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well.. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This uses the techniques from game manual 0. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. The first part of the algorithm reads the gamepad data and stores them in variables; This repository contains the code from the code we went over today. Detects. Mecanum Wheels Ftc Programming.
From gm0.copperforge.cc
Programming Tutorial Mecanum Drivetrain Game Manual 0 Mecanum Wheels Ftc Programming This repository contains the code from the code we went over today. Version 2.62 (built on 17.01.07) A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This means that the rollers are angled towards the center when looking at. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. Detects and alerts when i2c device disconnect. Version 2.62 (built on 17.01.07) Implements ftc blocks programming support for rev expansion hub and sensor hardware. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. A mecanum drive system makes use of a special type of wheel known. Mecanum Wheels Ftc Programming.
From www.chiefdelphi.com
FTC 8Wheel Mecanum Drive NX PowerPlay Technical Chief Delphi Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This uses the techniques from game manual 0. The first part of the algorithm reads the gamepad data and stores them in variables; Version 2.62 (built on 17.01.07) A short tutorial on how to program mecanum wheels for. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming A short tutorial on how to program mecanum wheels for a ftc robot. Implements ftc blocks programming support for rev expansion hub and sensor hardware. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This video is here to. Mecanum Wheels Ftc Programming.
From ai.thestempedia.com
Assembling Basic Quarky Mecanum Wheel Robot STEMpedia Education Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This uses the techniques from game manual 0. A standard mecanum drive configuration possesses 4. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming A short tutorial on how to program mecanum wheels for a ftc robot. This repository contains the code from the code we went over today. Implements ftc blocks programming support for rev expansion hub and sensor hardware. Detects and alerts when i2c device disconnect. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. Version 2.62. Mecanum Wheels Ftc Programming.
From www.alnis.dev
Mecanum Wheel Alnis Smidchens Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This repository contains the code from the code we went over today. A short tutorial on how to program mecanum wheels for a ftc robot. The first part of the algorithm reads the gamepad data. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming The first part of the algorithm reads the gamepad data and stores them in variables; This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. A short tutorial on how to program mecanum wheels for a ftc robot. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots. Mecanum Wheels Ftc Programming.
From www.shapeways.com
VEX Mecanum Wheel Adapters for FTC (G8NZA24FU) by Noah_Todd Mecanum Wheels Ftc Programming Detects and alerts when i2c device disconnect. Version 2.62 (built on 17.01.07) This means that the rollers are angled towards the center when looking at it from. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This repository contains the code from the code we went over today. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in. Mecanum Wheels Ftc Programming.
From www.reddit.com
Mecanum Wheel Drive Programming Tutorials! r/FTC Mecanum Wheels Ftc Programming A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. The first part of the algorithm reads the gamepad data and stores them in variables; Version. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This uses the techniques from game manual 0. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. The first part of the algorithm reads the gamepad data and stores them in variables; A short tutorial on how to program mecanum wheels for a ftc robot. Version 2.62 (built on 17.01.07) Detects and alerts when i2c. Mecanum Wheels Ftc Programming.
From www.studica.com
How to Build a Mecanum Drivetrain Instructions Studica Blog Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This means that the rollers are angled towards the center when looking at it from. This uses the techniques from game manual 0. Version 2.62 (built on 17.01.07) Axial (forwards/backwards), lateral (strafe), and yaw (rotation). Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming Detects and alerts when i2c device disconnect. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. A short tutorial on how to program mecanum wheels for a ftc robot. The first part of the algorithm reads the. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. Detects and alerts when i2c device disconnect. Implements ftc blocks programming support for rev expansion hub and sensor hardware. This repository contains the code from the code we went over today. A short tutorial on how to program mecanum wheels for a ftc robot. Version. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. Implements ftc blocks programming support for rev expansion hub and sensor hardware. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. Axial (forwards/backwards), lateral (strafe), and. Mecanum Wheels Ftc Programming.
From www.studica.com
Why Choose a Robot Chassis with Mecanum Wheels? Studica Blog Mecanum Wheels Ftc Programming This uses the techniques from game manual 0. A short tutorial on how to program mecanum wheels for a ftc robot. The first part of the algorithm reads the gamepad data and stores them in variables; This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. A mecanum drive system makes use. Mecanum Wheels Ftc Programming.
From www.elecfreaks.com
Mecanum wheel 64mm x 4 Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. This uses the techniques from game manual 0. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. A short tutorial on how to program mecanum wheels for a ftc robot. Version 2.62 (built on 17.01.07) This example teleop demonstrates a. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This repository contains the code from the code we went over today. This means that the rollers are angled towards the center when looking at it from. Implements ftc blocks programming support for rev expansion hub and sensor hardware. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. The first part of the algorithm reads the gamepad data and. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This uses the techniques from game manual 0. The first part of the algorithm reads the gamepad data and stores them in variables; Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. Detects and alerts when i2c device disconnect. A short. Mecanum Wheels Ftc Programming.
From edu.svet.gob.gt
Mecanum Wheels Vex edu.svet.gob.gt Mecanum Wheels Ftc Programming The first part of the algorithm reads the gamepad data and stores them in variables; Version 2.62 (built on 17.01.07) A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. Detects and alerts when i2c device disconnect. This example teleop. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming A short tutorial on how to program mecanum wheels for a ftc robot. Implements ftc blocks programming support for rev expansion hub and sensor hardware. This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. A mecanum drive. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. This repository contains the code from the code we went over today. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This uses the techniques from game. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming A short tutorial on how to program mecanum wheels for a ftc robot. Version 2.62 (built on 17.01.07) This means that the rollers are angled towards the center when looking at it from. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. The first part of the algorithm reads the gamepad data and stores them in variables; This uses the techniques from game manual 0. A short tutorial on how to program mecanum wheels. Mecanum Wheels Ftc Programming.
From www.vrogue.co
Mecanum Wheel Metal Chassis Robotic For Arduino Mega2 vrogue.co Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. A short tutorial on how to program mecanum wheels for a ftc robot. This uses the techniques from game manual 0. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. Detects. Mecanum Wheels Ftc Programming.
From www.youtube.com
Mecanum Wheels Tutorial YouTube Mecanum Wheels Ftc Programming This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. This means that the rollers are angled towards the center when looking at it from. The first part of the algorithm reads the gamepad data and stores them in variables; This uses the techniques from game manual 0. A short tutorial on how to program mecanum wheels. Mecanum Wheels Ftc Programming.
From fertuffo.artstation.com
Fertuffo 3D Mecanum wheel Mecanum Wheels Ftc Programming This means that the rollers are angled towards the center when looking at it from. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. This repository contains the code from the code we went over today. Detects and alerts. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. The first part of the algorithm reads the gamepad data and stores them in variables; This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain. Detects and alerts when i2c device disconnect. A short tutorial on how to program. Mecanum Wheels Ftc Programming.
From www.youtube.com
Introductory FTC Programming Programming for Mecanum Wheels YouTube Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. Detects and alerts when i2c device disconnect. A short tutorial on how to program mecanum wheels for a ftc robot. Version 2.62 (built on 17.01.07) This example teleop demonstrates a simple way to smoothly control a mecanum drivetrain.. Mecanum Wheels Ftc Programming.
From www.windward.solutions
How to program mecanum wheels ftc Mecanum Wheels Ftc Programming A standard mecanum drive configuration possesses 4 mecanum wheels oriented in an “x” shape. Version 2.62 (built on 17.01.07) This video is here to explain how to get a functioning robot for ftc competition with mecanum wheels. Implements ftc blocks programming support for rev expansion hub and sensor hardware. This example teleop demonstrates a simple way to smoothly control a. Mecanum Wheels Ftc Programming.
From patentyogi.com
Reinventing wheels Mecanum wheels that can move a vehicle in any Mecanum Wheels Ftc Programming Implements ftc blocks programming support for rev expansion hub and sensor hardware. A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. Axial (forwards/backwards), lateral (strafe), and yaw (rotation) gamepad values are. This uses the techniques from game manual 0.. Mecanum Wheels Ftc Programming.