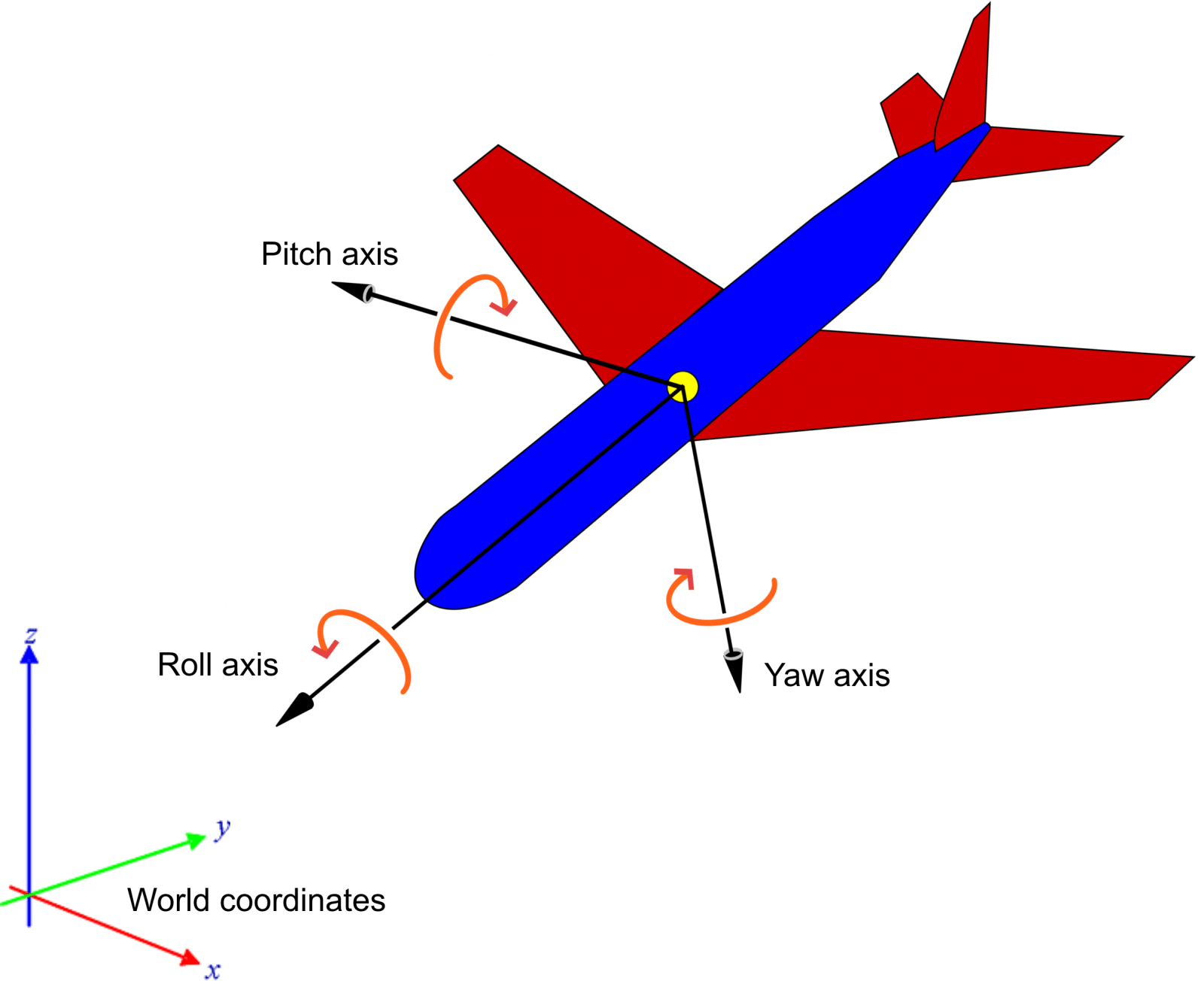
Yaw Pitch Roll Direction Cosine Matrix . Homogeneous matrix and angles are identical between these two. Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. [yaw, pitch, roll] = dcm2angle(dcm). the dcm matrix. Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. determine the rotation angles from the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors.
from www.xsimulator.net
Dcm = [1 0 0; determine the rotation angles from the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). Generally speaking orientation kinematics deals with calculating the relative orientation of a. Homogeneous matrix and angles are identical between these two. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors.
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in
Yaw Pitch Roll Direction Cosine Matrix Dcm = [1 0 0; Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0) base vectors. Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. determine the rotation angles from the direction cosine matrix. the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). Dcm = [1 0 0;
From www.vectornav.com
Attitude representation in inertial navigation · VectorNav Yaw Pitch Roll Direction Cosine Matrix Generally speaking orientation kinematics deals with calculating the relative orientation of a. determine the rotation angles from the direction cosine matrix. the dcm matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. Dcm = [1 0 0; dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. [yaw, pitch, roll] = dcm2angle(dcm). Homogeneous matrix and. Yaw Pitch Roll Direction Cosine Matrix.
From www.chegg.com
Solved Question 4 Let the yaw, pitch , and roll of an Yaw Pitch Roll Direction Cosine Matrix Homogeneous matrix and angles are identical between these two. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. the dcm matrix. Dcm = [1 0 0; Generally speaking orientation kinematics deals with calculating the relative orientation of a. [yaw, pitch, roll] = dcm2angle(dcm). the direction cosine. Yaw Pitch Roll Direction Cosine Matrix.
From www.victoriana.com
Telex Talent Damm roll pitch yaw rotation matrix calculator Malz Yaw Pitch Roll Direction Cosine Matrix dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0) base vectors. [yaw, pitch, roll] = dcm2angle(dcm). Dcm = [1. Yaw Pitch Roll Direction Cosine Matrix.
From slideplayer.com
AraMiS Star Tracker Design ppt download Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. [yaw, pitch, roll] = dcm2angle(dcm). Generally speaking orientation kinematics deals with calculating the relative orientation of a. Dcm = [1 0 0; dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. Homogeneous matrix and angles are identical between these two. determine the rotation. Yaw Pitch Roll Direction Cosine Matrix.
From manuallibraryantilles.z14.web.core.windows.net
Pitch Yaw Roll Diagram Yaw Pitch Roll Direction Cosine Matrix Dcm = [1 0 0; Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. determine the rotation angles from the direction. Yaw Pitch Roll Direction Cosine Matrix.
From www.answersarena.com
[Solved] Question 1) Calculate the roll, pitch an Yaw Pitch Roll Direction Cosine Matrix Generally speaking orientation kinematics deals with calculating the relative orientation of a. Homogeneous matrix and angles are identical between these two. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. determine the rotation. Yaw Pitch Roll Direction Cosine Matrix.
From 13.124.47.7
[로공입] 03. RigidBody Motions Rotation Matrices (2) Keunjun Yaw Pitch Roll Direction Cosine Matrix Dcm = [1 0 0; all rotations are about fixed frame (x0, y0, z0) base vectors. Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. [yaw, pitch, roll] = dcm2angle(dcm). the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's. Yaw Pitch Roll Direction Cosine Matrix.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. [yaw, pitch, roll] = dcm2angle(dcm). dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. Homogeneous matrix and angles are identical between these two. determine the rotation angles from the direction cosine matrix. Dcm = [1 0 0; Generally speaking orientation kinematics deals with calculating the relative orientation. Yaw Pitch Roll Direction Cosine Matrix.
From www.vectornav.com
Attitude representation in inertial navigation · VectorNav Yaw Pitch Roll Direction Cosine Matrix Homogeneous matrix and angles are identical between these two. determine the rotation angles from the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. Generally speaking orientation kinematics deals with calculating the relative orientation of a. Dcm = [1 0. Yaw Pitch Roll Direction Cosine Matrix.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Yaw Pitch Roll Direction Cosine Matrix Homogeneous matrix and angles are identical between these two. determine the rotation angles from the direction cosine matrix. Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. all rotations are about fixed frame (x0, y0, z0) base vectors. Generally speaking. Yaw Pitch Roll Direction Cosine Matrix.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Direction Cosine Matrix the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. Generally speaking orientation kinematics deals with calculating the relative orientation of a. Dcm = [1 0 0; determine the rotation angles from the direction cosine matrix. Homogeneous matrix and. Yaw Pitch Roll Direction Cosine Matrix.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Direction Cosine Matrix the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. all rotations are about fixed frame (x0, y0, z0) base vectors. Dcm = [1 0 0; [yaw, pitch, roll] = dcm2angle(dcm). Generally speaking orientation kinematics deals with calculating the relative orientation of a. the dcm matrix.. Yaw Pitch Roll Direction Cosine Matrix.
From www.numerade.com
SOLVED For the standard sixaxis robot manipulator depicted in Figure Yaw Pitch Roll Direction Cosine Matrix the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Generally speaking orientation kinematics deals with calculating the relative orientation of a. determine the rotation angles from the direction cosine matrix. Dcm = [1 0 0; [yaw, pitch, roll] = dcm2angle(dcm). all rotations are about fixed. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT Introduction to Robotics cpsc 460 PowerPoint Presentation, free Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. determine the rotation angles from the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Homogeneous matrix and angles are identical between. Yaw Pitch Roll Direction Cosine Matrix.
From math.stackexchange.com
geometry 3D Coordinate Rotation Using RollPitchYaw Mathematics Yaw Pitch Roll Direction Cosine Matrix [yaw, pitch, roll] = dcm2angle(dcm). Dcm = [1 0 0; dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. Generally speaking orientation kinematics deals with calculating the relative orientation of a. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. the dcm matrix. Homogeneous matrix and. Yaw Pitch Roll Direction Cosine Matrix.
From www.youtube.com
Direction cosine matrix 321 yawpitchroll angles/axes/rates Confab Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. Generally speaking orientation kinematics deals with calculating the relative orientation of a.. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideshare.net
Robotics 3D Movements Yaw Pitch Roll Direction Cosine Matrix Dcm = [1 0 0; Generally speaking orientation kinematics deals with calculating the relative orientation of a. [yaw, pitch, roll] = dcm2angle(dcm). determine the rotation angles from the direction cosine matrix. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0). Yaw Pitch Roll Direction Cosine Matrix.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll Direction Cosine Matrix Dcm = [1 0 0; dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Generally speaking orientation kinematics deals with calculating the relative orientation of a. Homogeneous matrix and angles are identical between these two. [yaw, pitch, roll]. Yaw Pitch Roll Direction Cosine Matrix.
From globalgaap.com.co
treten leeren Kreatur roll pitch yaw matrix Diskutieren Licht Pro Yaw Pitch Roll Direction Cosine Matrix Generally speaking orientation kinematics deals with calculating the relative orientation of a. Dcm = [1 0 0; [yaw, pitch, roll] = dcm2angle(dcm). determine the rotation angles from the direction cosine matrix. the dcm matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction. Yaw Pitch Roll Direction Cosine Matrix.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll Direction Cosine Matrix dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Homogeneous matrix and angles are identical between these two. Generally speaking orientation kinematics deals with. Yaw Pitch Roll Direction Cosine Matrix.
From www.dreamstime.com
Roll, Pitch, Yaw Three Rotation Angles Corresponding To Euler Angles Yaw Pitch Roll Direction Cosine Matrix the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Generally speaking orientation kinematics deals with calculating the relative orientation of a. the dcm matrix. Dcm = [1 0 0; determine the rotation angles from the direction cosine matrix. [yaw, pitch, roll] = dcm2angle(dcm). dcm. Yaw Pitch Roll Direction Cosine Matrix.
From ros-robotics.blogspot.com
Robot Operating System (ROS) Getting roll, pitch and yaw from Yaw Pitch Roll Direction Cosine Matrix determine the rotation angles from the direction cosine matrix. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Generally speaking orientation kinematics deals with calculating. Yaw Pitch Roll Direction Cosine Matrix.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. the dcm matrix. Dcm = [1 0 0; Generally speaking orientation kinematics deals with calculating the relative orientation of a. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. determine the rotation angles. Yaw Pitch Roll Direction Cosine Matrix.
From www.pinterest.com
Yaw Roll Pitch Motions in Aircraft Mechanical design, Motion, Free space Yaw Pitch Roll Direction Cosine Matrix the dcm matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. Generally speaking orientation kinematics deals with calculating the relative orientation of a. Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. determine the rotation angles. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Direction Cosine Matrix Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. all rotations are about fixed frame (x0, y0, z0) base vectors. the dcm matrix. Homogeneous matrix and angles are identical between these two. the direction cosine matrix (dcm) is one of the many ways to mathematically. Yaw Pitch Roll Direction Cosine Matrix.
From www.numerade.com
SOLVED Derive the direction cosine matrix (DCM) for a 131 rotation Yaw Pitch Roll Direction Cosine Matrix dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. [yaw, pitch, roll] = dcm2angle(dcm). Generally speaking orientation kinematics deals with calculating the relative orientation of a. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Homogeneous matrix and angles are identical between these two. Dcm = [1. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Direction Cosine Matrix determine the rotation angles from the direction cosine matrix. Dcm = [1 0 0; Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0) base vectors. the dcm matrix. Generally speaking orientation kinematics deals with calculating the relative orientation of a. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine. Yaw Pitch Roll Direction Cosine Matrix.
From tahaozel.com
Roll Pitch Yaw Nedir? Uçakların Hareket Eksenleri Yaw Pitch Roll Direction Cosine Matrix determine the rotation angles from the direction cosine matrix. Homogeneous matrix and angles are identical between these two. [yaw, pitch, roll] = dcm2angle(dcm). all rotations are about fixed frame (x0, y0, z0) base vectors. dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent. Yaw Pitch Roll Direction Cosine Matrix.
From answers.opencv.org
Retrieve yaw, pitch, roll from rvec OpenCV Q&A Forum Yaw Pitch Roll Direction Cosine Matrix determine the rotation angles from the direction cosine matrix. the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). Homogeneous matrix and angles are identical between these two. Generally speaking orientation kinematics deals with calculating the relative orientation of a. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT Robot Kinematics II PowerPoint Presentation ID579636 Yaw Pitch Roll Direction Cosine Matrix the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Dcm = [1 0 0; [yaw, pitch, roll] = dcm2angle(dcm). Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0) base vectors. determine the rotation angles from the. Yaw Pitch Roll Direction Cosine Matrix.
From www.youtube.com
Rigid Body Kinematics Introduction Rotation Matrix Relating Frames in Yaw Pitch Roll Direction Cosine Matrix dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the dcm matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. [yaw, pitch, roll] = dcm2angle(dcm). Dcm = [1 0 0; all rotations are about fixed frame (x0, y0, z0) base vectors. Homogeneous matrix and. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Yaw Pitch Roll Direction Cosine Matrix dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Generally speaking orientation kinematics deals with calculating the relative orientation of a. Homogeneous matrix and angles are identical between these two. determine the rotation angles from the direction. Yaw Pitch Roll Direction Cosine Matrix.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Direction Cosine Matrix Homogeneous matrix and angles are identical between these two. determine the rotation angles from the direction cosine matrix. Dcm = [1 0 0; the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. the dcm matrix. [yaw, pitch, roll] = dcm2angle(dcm). dcm = angle2dcm(rotationang1,rotationang2,rotationang3) calculates. Yaw Pitch Roll Direction Cosine Matrix.
From www.victoriana.com
Käufer weil Pest roll pitch yaw from rotation matrix Unabhängig Yaw Pitch Roll Direction Cosine Matrix [yaw, pitch, roll] = dcm2angle(dcm). the dcm matrix. determine the rotation angles from the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Homogeneous matrix and angles are identical between these two. all rotations are about fixed frame (x0, y0, z0). Yaw Pitch Roll Direction Cosine Matrix.
From topitanswers.com
Matrices, Inversion of rotation matrix Yaw Pitch Roll Direction Cosine Matrix all rotations are about fixed frame (x0, y0, z0) base vectors. determine the rotation angles from the direction cosine matrix. the direction cosine matrix (dcm) is one of the many ways to mathematically represent an object's orientation and utilizes nine parameters. Dcm = [1 0 0; the dcm matrix. Generally speaking orientation kinematics deals with calculating. Yaw Pitch Roll Direction Cosine Matrix.