Camera Calibration Formula . For the radial factor one uses the following formula: Learn how to calibrate a camera. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. For the distortion opencv takes into account the radial and tangential factors. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. Xdistorted = x(1 +k1r2 +k2r4. Types of distortion caused by cameras. Study the foundational algorithms for camera localization. In this section, we will learn about. How to find the intrinsic and extrinsic properties of a camera. Two applications of the camera localization. Camera calibration is the technique used to understand and correct these distortions. It's a fundamental process for achieving more.
from mphy0026.readthedocs.io
Camera calibration is the technique used to understand and correct these distortions. For the distortion opencv takes into account the radial and tangential factors. Study the foundational algorithms for camera localization. Learn how to calibrate a camera. Two applications of the camera localization. Xdistorted = x(1 +k1r2 +k2r4. In this section, we will learn about. How to find the intrinsic and extrinsic properties of a camera. Types of distortion caused by cameras. For the radial factor one uses the following formula:
5.5. Intrinsic camera parameters calibration — MPHY0026 documentation
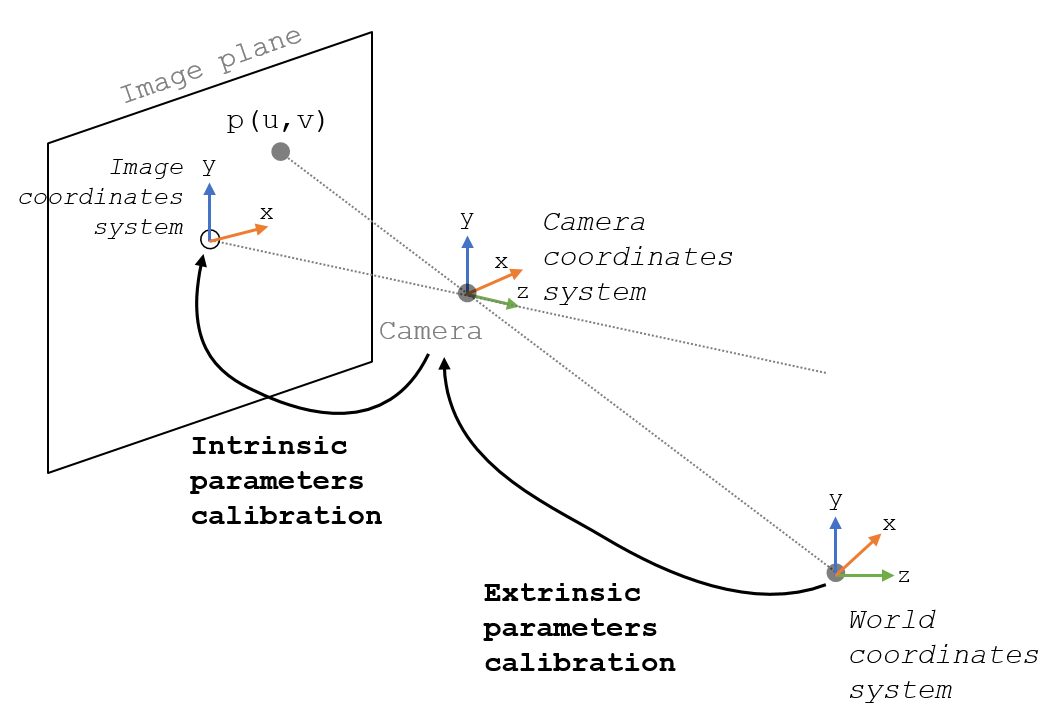
Camera Calibration Formula Camera calibration is the technique used to understand and correct these distortions. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. Study the foundational algorithms for camera localization. Types of distortion caused by cameras. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. In this section, we will learn about. How to find the intrinsic and extrinsic properties of a camera. It's a fundamental process for achieving more. For the distortion opencv takes into account the radial and tangential factors. Learn how to calibrate a camera. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Xdistorted = x(1 +k1r2 +k2r4. For the radial factor one uses the following formula: Camera calibration is the technique used to understand and correct these distortions. Two applications of the camera localization.
From www.mdpi.com
Sensors Free FullText An Improved Projector Calibration Method by Camera Calibration Formula For the distortion opencv takes into account the radial and tangential factors. Study the foundational algorithms for camera localization. In this section, we will learn about. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Camera. Camera Calibration Formula.
From www.slideserve.com
PPT Camera Calibration PowerPoint Presentation, free download ID Camera Calibration Formula In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Learn how to calibrate a camera. Camera calibration is the technique used to understand and correct these distortions. Study the foundational algorithms for camera localization. For the. Camera Calibration Formula.
From www.slideserve.com
PPT Camera Calibration from Planar Patterns PowerPoint Presentation Camera Calibration Formula In this section, we will learn about. For the distortion opencv takes into account the radial and tangential factors. How to find the intrinsic and extrinsic properties of a camera. For the radial factor one uses the following formula: In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a. Camera Calibration Formula.
From eikosim.com
Camera calibration principles and procedures EikoSim Camera Calibration Formula In this section, we will learn about. Camera calibration is the technique used to understand and correct these distortions. Learn how to calibrate a camera. Xdistorted = x(1 +k1r2 +k2r4. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. In this guide, we will explore the process of calibrating a camera using. Camera Calibration Formula.
From www.vrogue.co
Stereo Camera Calibration Using C And Opencv Tutorial Machine Vrogue Camera Calibration Formula It's a fundamental process for achieving more. In this section, we will learn about. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. For the distortion opencv takes into account the radial and tangential factors. Camera calibration is the technique used to understand and correct these distortions. In this guide, we will explore the process of calibrating. Camera Calibration Formula.
From www.vrogue.co
Image Feature Detection Description And Matching In Opencv How To Camera Calibration Formula Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. For the radial factor one uses the following formula: Camera calibration is the technique used to understand and correct these distortions. Xdistorted = x(1 +k1r2 +k2r4. For the distortion opencv takes into. Camera Calibration Formula.
From slideplayer.com
Geometry of a single camera ppt download Camera Calibration Formula Xdistorted = x(1 +k1r2 +k2r4. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Types of distortion caused by cameras. Learn how to calibrate a camera. It's a fundamental process for achieving more. For the distortion. Camera Calibration Formula.
From www.vrogue.co
Matlab Camera Calibration Intrinsic Matrix What Do Th vrogue.co Camera Calibration Formula Study the foundational algorithms for camera localization. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. How to find the intrinsic and extrinsic properties of a camera. It's a fundamental process for achieving more. Camera calibration is the technique used to understand and correct these distortions. For the radial factor one uses. Camera Calibration Formula.
From mphy0026.readthedocs.io
5.5. Intrinsic camera parameters calibration — MPHY0026 documentation Camera Calibration Formula Xdistorted = x(1 +k1r2 +k2r4. Camera calibration is the technique used to understand and correct these distortions. For the radial factor one uses the following formula: In this section, we will learn about. Learn how to calibrate a camera. For the distortion opencv takes into account the radial and tangential factors. Camera calibration to fully calibrate a camera, we not. Camera Calibration Formula.
From medium.com
Vision] Camera calibration by PHIL Nov, 2022 Medium Camera Calibration Formula Study the foundational algorithms for camera localization. It's a fundamental process for achieving more. In this section, we will learn about. Types of distortion caused by cameras. How to find the intrinsic and extrinsic properties of a camera. Two applications of the camera localization. Camera calibration to fully calibrate a camera, we not only need to know c, but also. Camera Calibration Formula.
From www.slideserve.com
PPT Global Alignment and Structure from Motion PowerPoint Camera Calibration Formula Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Camera calibration to fully calibrate a camera, we not only. Camera Calibration Formula.
From www.slideserve.com
PPT Camera calibration & Omnidirectional camera calibration Camera Calibration Formula Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. In this section, we will learn about. Types of distortion caused by cameras. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. Xdistorted =. Camera Calibration Formula.
From tokai-kaoninsho.com
カメラキャリブレーションのABC 知っておきたい基本 「AIのちからを簡単に」東海顔認証 Camera Calibration Formula Camera calibration is the technique used to understand and correct these distortions. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. For the distortion opencv takes into account the radial and tangential factors. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining. Camera Calibration Formula.
From www.slideserve.com
PPT Camera Calibration PowerPoint Presentation, free download ID317704 Camera Calibration Formula How to find the intrinsic and extrinsic properties of a camera. For the radial factor one uses the following formula: Two applications of the camera localization. Camera calibration is the technique used to understand and correct these distortions. Types of distortion caused by cameras. In this guide, we will explore the process of calibrating a camera using a charuco board. Camera Calibration Formula.
From www.pdfprof.com
a new calibration model of camera lens distortion Camera Calibration Formula For the radial factor one uses the following formula: Study the foundational algorithms for camera localization. Types of distortion caused by cameras. For the distortion opencv takes into account the radial and tangential factors. Two applications of the camera localization. Xdistorted = x(1 +k1r2 +k2r4. How to find the intrinsic and extrinsic properties of a camera. Camera calibration to fully. Camera Calibration Formula.
From www.researchgate.net
Geometry for camera calibration. Download Scientific Diagram Camera Calibration Formula For the distortion opencv takes into account the radial and tangential factors. In this section, we will learn about. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. It's a fundamental process for achieving more. Camera calibration to fully calibrate a camera, we not only need to know c, but also the. Camera Calibration Formula.
From learnopencv.com
Camera Calibration using OpenCV LearnOpenCV Camera Calibration Formula Study the foundational algorithms for camera localization. Two applications of the camera localization. In this section, we will learn about. Xdistorted = x(1 +k1r2 +k2r4. Learn how to calibrate a camera. It's a fundamental process for achieving more. Types of distortion caused by cameras. How to find the intrinsic and extrinsic properties of a camera. In this guide, we will. Camera Calibration Formula.
From www.researchgate.net
Popular calibration objectives, models, and extended applications in Camera Calibration Formula In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. How to find the intrinsic and extrinsic properties of a camera. Camera calibration is the technique used to understand and correct these distortions. For the distortion opencv. Camera Calibration Formula.
From www.slideserve.com
PPT Structure from Motion PowerPoint Presentation, free download ID Camera Calibration Formula In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. Two applications of the camera localization. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. How to find the intrinsic and extrinsic properties of. Camera Calibration Formula.
From towardsdatascience.com
Camera Calibration. Camera Geometry and The Pinhole Model by Aerin Camera Calibration Formula Types of distortion caused by cameras. How to find the intrinsic and extrinsic properties of a camera. For the radial factor one uses the following formula: Camera calibration is the technique used to understand and correct these distortions. Two applications of the camera localization. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. For the distortion opencv. Camera Calibration Formula.
From www.mdpi.com
Applied Sciences Free FullText Alignment Method of an Axis Based Camera Calibration Formula Xdistorted = x(1 +k1r2 +k2r4. In this section, we will learn about. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. It's a fundamental process for achieving more. In this guide, we will explore the process of calibrating a camera using. Camera Calibration Formula.
From www.slideserve.com
PPT Camera Calibration PowerPoint Presentation, free download ID317704 Camera Calibration Formula Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. How to find the intrinsic and extrinsic properties of a camera. It's a fundamental process for achieving more. For the radial factor one uses the following formula: Xdistorted = x(1 +k1r2 +k2r4. Camera calibration to fully calibrate a camera, we not only need. Camera Calibration Formula.
From vdocuments.mx
Assignment 1 Use OpenCV for camera calibrationmurray/wiki/images/c/c7 Camera Calibration Formula Two applications of the camera localization. Types of distortion caused by cameras. Learn how to calibrate a camera. For the radial factor one uses the following formula: Xdistorted = x(1 +k1r2 +k2r4. Camera calibration is the technique used to understand and correct these distortions. In this guide, we will explore the process of calibrating a camera using a charuco board. Camera Calibration Formula.
From www.slideserve.com
PPT Camera terminology PowerPoint Presentation, free download ID Camera Calibration Formula How to find the intrinsic and extrinsic properties of a camera. For the distortion opencv takes into account the radial and tangential factors. It's a fundamental process for achieving more. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. Learn how. Camera Calibration Formula.
From www.researchgate.net
Resulting parameters of the camera calibration Download Table Camera Calibration Formula In this section, we will learn about. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. In this guide, we will explore the process of calibrating a camera using. Camera Calibration Formula.
From www.slideserve.com
PPT Camera calibration PowerPoint Presentation, free download ID Camera Calibration Formula For the distortion opencv takes into account the radial and tangential factors. Learn how to calibrate a camera. How to find the intrinsic and extrinsic properties of a camera. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. Types of distortion caused by cameras. Camera calibration to fully calibrate a camera, we. Camera Calibration Formula.
From www.researchgate.net
Basic process of camera calibration Download Scientific Diagram Camera Calibration Formula Learn how to calibrate a camera. For the radial factor one uses the following formula: Study the foundational algorithms for camera localization. For the distortion opencv takes into account the radial and tangential factors. Camera calibration is the technique used to understand and correct these distortions. Two applications of the camera localization. In this guide, we will explore the process. Camera Calibration Formula.
From www.researchgate.net
Multiple Camera Calibration. For each orientation and position of the Camera Calibration Formula For the distortion opencv takes into account the radial and tangential factors. Study the foundational algorithms for camera localization. How to find the intrinsic and extrinsic properties of a camera. Learn how to calibrate a camera. Two applications of the camera localization. Xdistorted = x(1 +k1r2 +k2r4. Camera calibration is a fundamental task in computer vision crucial in various applications. Camera Calibration Formula.
From www.mdpi.com
Sensors Free FullText MachineLearningInspired Workflow for Camera Calibration Formula It's a fundamental process for achieving more. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. For the radial factor one uses the following formula: In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic. Camera Calibration Formula.
From www.youtube.com
Camera Calibration using OpenCV YouTube Camera Calibration Formula Types of distortion caused by cameras. Camera calibration is the technique used to understand and correct these distortions. How to find the intrinsic and extrinsic properties of a camera. Study the foundational algorithms for camera localization. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. In this section, we will learn about.. Camera Calibration Formula.
From www.slideserve.com
PPT Camera calibration & Omnidirectional camera calibration Camera Calibration Formula Types of distortion caused by cameras. For the radial factor one uses the following formula: Study the foundational algorithms for camera localization. In this guide, we will explore the process of calibrating a camera using a charuco board and opencv (4.8), with a focus on obtaining intrinsic and extrinsic parameters, as well as calculating the. How to find the intrinsic. Camera Calibration Formula.
From www.researchgate.net
, Camera calibration setup Download Scientific Diagram Camera Calibration Formula For the radial factor one uses the following formula: Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. In this section, we will learn about. Camera calibration is the technique used to understand and correct these distortions. Xdistorted = x(1 +k1r2. Camera Calibration Formula.
From www.researchgate.net
Calibration model of LiDARcamera system and projection model of the Camera Calibration Formula How to find the intrinsic and extrinsic properties of a camera. Types of distortion caused by cameras. Two applications of the camera localization. For the distortion opencv takes into account the radial and tangential factors. Study the foundational algorithms for camera localization. For the radial factor one uses the following formula: Camera calibration to fully calibrate a camera, we not. Camera Calibration Formula.
From www.slideserve.com
PPT Camera calibration PowerPoint Presentation, free download ID Camera Calibration Formula Camera calibration to fully calibrate a camera, we not only need to know c, but also the breakdown of c to the intrinsic parameters defined by k and. Study the foundational algorithms for camera localization. Xdistorted = x(1 +k1r2 +k2r4. For the radial factor one uses the following formula: For the distortion opencv takes into account the radial and tangential. Camera Calibration Formula.
From stackoverflow.com
Getting 2 values of focal length when finding Intrinsic camera matrix Camera Calibration Formula Learn how to calibrate a camera. How to find the intrinsic and extrinsic properties of a camera. Camera calibration is a fundamental task in computer vision crucial in various applications such as 3d reconstruction,. For the radial factor one uses the following formula: Camera calibration to fully calibrate a camera, we not only need to know c, but also the. Camera Calibration Formula.