Cameras Disparity Meaning . A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. What are a disparity map and disparity image, and what is the difference between them? Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. It relies on two parallel view‑ports and calculates depth by estimating disparities. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Depth is inversely proportional to disparity. The less the disparity is, the farther the object is to the. Any point in the scene that is visible in both cameras. The more the disparity is, the closer the object is to the baseline of the camera.
from capturetheatlas.com
The more the disparity is, the closer the object is to the baseline of the camera. Any point in the scene that is visible in both cameras. What are a disparity map and disparity image, and what is the difference between them? It relies on two parallel view‑ports and calculates depth by estimating disparities. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The less the disparity is, the farther the object is to the. Depth is inversely proportional to disparity. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction.
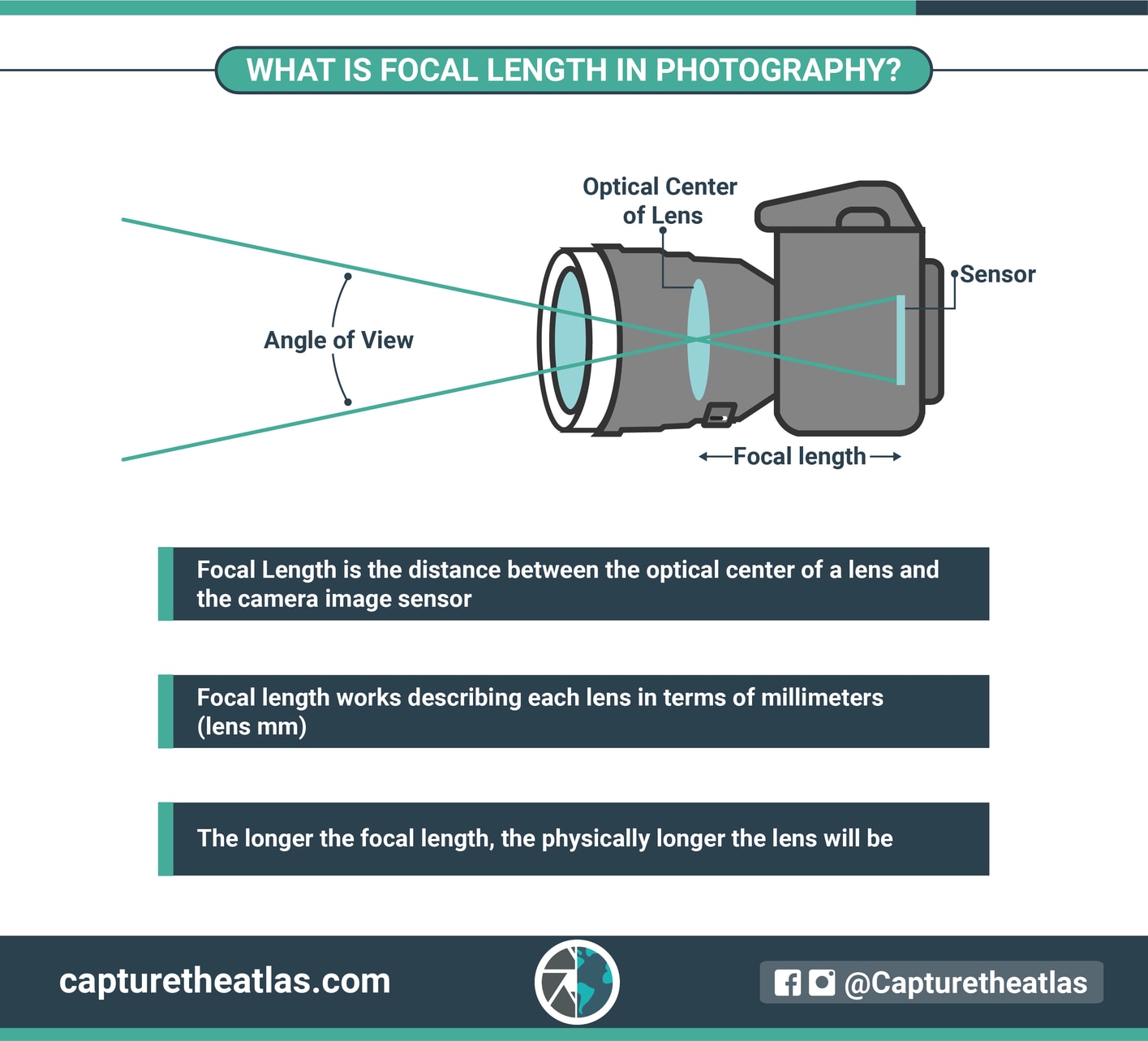
What is Focal Length in Photography? Focal Length Explained
Cameras Disparity Meaning Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. It relies on two parallel view‑ports and calculates depth by estimating disparities. The more the disparity is, the closer the object is to the baseline of the camera. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. What are a disparity map and disparity image, and what is the difference between them? Any point in the scene that is visible in both cameras. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. The less the disparity is, the farther the object is to the. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. Depth is inversely proportional to disparity.
From thevideoanalyst.com
Video Analysis Camera Specs The Video Cameras Disparity Meaning It relies on two parallel view‑ports and calculates depth by estimating disparities. What are a disparity map and disparity image, and what is the difference between them? Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. A disparity map is a type of depth map that is commonly used in stereo vision and. Cameras Disparity Meaning.
From www.cns.nyu.edu
Perception Lecture Notes Depth, Size, and Shape Cameras Disparity Meaning It relies on two parallel view‑ports and calculates depth by estimating disparities. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. The less the disparity is, the farther the object is to the. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The. Cameras Disparity Meaning.
From www.semanticscholar.org
Figure 2 from Improved Depth Recovery In Consumer Depth Cameras via Cameras Disparity Meaning Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. What are a disparity map and disparity image, and what is the difference between them? Depth is inversely proportional to disparity. The more the disparity is, the closer the object is to the baseline of the camera. Any point in the. Cameras Disparity Meaning.
From circuitlistmisdoing99.z21.web.core.windows.net
Photography Camera Settings Guide Cameras Disparity Meaning It relies on two parallel view‑ports and calculates depth by estimating disparities. The less the disparity is, the farther the object is to the. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Depth is inversely proportional to disparity. A disparity map is a type of depth map. Cameras Disparity Meaning.
From www.videomaker.com
Camera Controls & Settings Depth of field Explained Videomaker Cameras Disparity Meaning The more the disparity is, the closer the object is to the baseline of the camera. Any point in the scene that is visible in both cameras. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. The disparity is the difference in image location of the same 3d point when. Cameras Disparity Meaning.
From loexsdjio.blob.core.windows.net
Cameras On Meaning at Debbie Hammon blog Cameras Disparity Meaning What are a disparity map and disparity image, and what is the difference between them? The more the disparity is, the closer the object is to the baseline of the camera. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The disparity is the difference in image location of the same 3d point. Cameras Disparity Meaning.
From www.pinterest.com
Getting out of Auto Understanding ISO on your digital camera Iso Cameras Disparity Meaning The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. What. Cameras Disparity Meaning.
From www.researchgate.net
6 (Top) 2D disparity estimation. (a) Two unaligned cameras. (b) A 2D Cameras Disparity Meaning Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. The more the disparity is, the closer the object is to the baseline of the camera. Any point in the scene that is visible in both cameras. A disparity map is a type of depth map that is commonly used in. Cameras Disparity Meaning.
From www.researchgate.net
Stereoscopic scene model presenting incorrect positioning of cameras Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. It relies on two parallel view‑ports and calculates depth by estimating disparities. The more the disparity is, the closer the object is to the baseline of the camera. Any point in the scene that is visible in both cameras. The disparity. Cameras Disparity Meaning.
From learnopencv.com
Disparity Estimation Using Deep Learning LearnOpenCV Cameras Disparity Meaning Any point in the scene that is visible in both cameras. The less the disparity is, the farther the object is to the. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. What are a disparity map and disparity image, and what is the difference between them? The. Cameras Disparity Meaning.
From www.researchgate.net
(A) Schematic of the stereo disparity system. (B) Example of images Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. It relies on two parallel view‑ports and calculates depth by estimating disparities. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Disparity refers to the distance between two corresponding. Cameras Disparity Meaning.
From www.researchgate.net
The MOSvalues as a function of camera separation and disparity ranges Cameras Disparity Meaning What are a disparity map and disparity image, and what is the difference between them? The more the disparity is, the closer the object is to the baseline of the camera. The less the disparity is, the farther the object is to the. Disparity refers to the distance between two corresponding points in the left and right image of a. Cameras Disparity Meaning.
From cameraharmony.com
Focal Length Explained A Beginner’s Guide Camera Harmony Cameras Disparity Meaning Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. The more the disparity is, the closer the object is to the baseline of the camera. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Depth is inversely proportional. Cameras Disparity Meaning.
From www.researchgate.net
Stereoscopic scene model presenting incorrect positioning of cameras Cameras Disparity Meaning The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. What are a disparity map and disparity image, and what is the difference between them? It relies on two parallel view‑ports and calculates depth by estimating disparities. A disparity map is a type of depth map that is commonly. Cameras Disparity Meaning.
From www.slideserve.com
PPT Geometric and Radiometric Camera Calibration PowerPoint Cameras Disparity Meaning The more the disparity is, the closer the object is to the baseline of the camera. The less the disparity is, the farther the object is to the. Any point in the scene that is visible in both cameras. What are a disparity map and disparity image, and what is the difference between them? A disparity map is a type. Cameras Disparity Meaning.
From www.researchgate.net
Stereo disparity principle for parallel cameras. Download Scientific Cameras Disparity Meaning The less the disparity is, the farther the object is to the. What are a disparity map and disparity image, and what is the difference between them? Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. The disparity is the difference in image location of the same 3d point when. Cameras Disparity Meaning.
From www.researchgate.net
6 (a) Image of the left camera (b) Image of the right camera (c Cameras Disparity Meaning The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. What are a disparity map and disparity image, and what is the difference between them? The more the disparity is, the closer the object is to the baseline of the camera. Disparity refers to the distance between two corresponding. Cameras Disparity Meaning.
From slideplayer.com
Chapter 11 Stereopsis Stereopsis Fusing the pictures taken by two Cameras Disparity Meaning The more the disparity is, the closer the object is to the baseline of the camera. The less the disparity is, the farther the object is to the. It relies on two parallel view‑ports and calculates depth by estimating disparities. Any point in the scene that is visible in both cameras. A disparity map is a type of depth map. Cameras Disparity Meaning.
From www.e-consystems.com
What are depthsensing cameras? How do they work? econ Systems Cameras Disparity Meaning Depth is inversely proportional to disparity. Any point in the scene that is visible in both cameras. The more the disparity is, the closer the object is to the baseline of the camera. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. A disparity map is a type. Cameras Disparity Meaning.
From semiconductor.samsung.com
UltraHigh Resolution 200MP Telephoto Cameras The Next Big Thing in Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Depth is inversely proportional to disparity. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. What are a disparity map and disparity image, and what is the difference between them? The less the disparity. Cameras Disparity Meaning.
From www.mdpi.com
Sensors Free FullText Analysis of Disparity Information for Depth Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. It relies on two parallel view‑ports and calculates depth by estimating disparities. What are a disparity map and disparity image, and what is the difference between them? The disparity is the difference in image location of the same 3d point when. Cameras Disparity Meaning.
From journals.sagepub.com
The Role of Vertical Disparity in Distance and Depth Perception as Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The less the disparity is, the farther the object is to the. Depth is inversely proportional to disparity. It relies on two parallel view‑ports and. Cameras Disparity Meaning.
From www.researchgate.net
The 10 images obtained from camera I Figure 6. Array images with Cameras Disparity Meaning What are a disparity map and disparity image, and what is the difference between them? The more the disparity is, the closer the object is to the baseline of the camera. The less the disparity is, the farther the object is to the. Depth is inversely proportional to disparity. It relies on two parallel view‑ports and calculates depth by estimating. Cameras Disparity Meaning.
From forum.opencv.org
Disparity calculations and camera centers C++ OpenCV Cameras Disparity Meaning The less the disparity is, the farther the object is to the. What are a disparity map and disparity image, and what is the difference between them? Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. Depth is inversely proportional to disparity. It relies on two parallel view‑ports and calculates depth by estimating. Cameras Disparity Meaning.
From slideplayer.com
Twoview geometry. ppt download Cameras Disparity Meaning Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. Depth is inversely proportional to disparity. What are a disparity map and disparity image, and what is the difference between them? A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. It. Cameras Disparity Meaning.
From johnwlambert.github.io
Stereo and Disparity Cameras Disparity Meaning The less the disparity is, the farther the object is to the. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. What are a disparity map and disparity image, and what is the difference between them? The more the disparity is, the closer the object is to the baseline of. Cameras Disparity Meaning.
From www.researchgate.net
Definition of spherical disparity. Xaxes of the two subcameras are Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. It relies on two parallel view‑ports and calculates depth by estimating disparities. The disparity is the difference in image location of the same 3d point. Cameras Disparity Meaning.
From johnwlambert.github.io
Stereo and Disparity Cameras Disparity Meaning The less the disparity is, the farther the object is to the. Depth is inversely proportional to disparity. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The more the disparity is, the closer the object is to the baseline of the camera. It relies on two parallel view‑ports and calculates depth by. Cameras Disparity Meaning.
From www.slideserve.com
PPT Stereo Vision PowerPoint Presentation, free download ID522763 Cameras Disparity Meaning What are a disparity map and disparity image, and what is the difference between them? Depth is inversely proportional to disparity. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. It relies on two parallel view‑ports and calculates depth by estimating disparities. Disparity refers to the distance between two corresponding. Cameras Disparity Meaning.
From capturetheatlas.com
What is Focal Length in Photography? Focal Length Explained Cameras Disparity Meaning Depth is inversely proportional to disparity. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. Any point in the scene that is visible in both cameras. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The more the disparity is, the closer the. Cameras Disparity Meaning.
From www.researchgate.net
(PDF) Disparity Estimation for Camera Arrays Using Reliability Guided Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Depth is inversely proportional to disparity. It relies on two parallel view‑ports and calculates depth by estimating disparities. What are a disparity map and disparity image, and what is the difference between them? The less the disparity is, the farther the. Cameras Disparity Meaning.
From www.slideserve.com
PPT Fast disparity motion estimation in MVC based on range prediction Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Any point in the scene that is visible in both cameras. The less the disparity is, the farther the object. Cameras Disparity Meaning.
From www.studiobinder.com
Focal Length An Easy Guide to Using and Understanding Camera Lenses Cameras Disparity Meaning Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. Depth is inversely proportional to disparity. A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Any point in the scene that is visible in both cameras. The less the disparity is, the farther the. Cameras Disparity Meaning.
From photographylife.com
Camera Resolution Explained Cameras Disparity Meaning Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. The disparity is the difference in image location of the same 3d point when projected under perspective to two different cameras. Disparity refers to the distance between two corresponding points in the left and right image of a stereo pair. Any point in the. Cameras Disparity Meaning.
From www.slideserve.com
PPT Geometric and Radiometric Camera Calibration PowerPoint Cameras Disparity Meaning A disparity map is a type of depth map that is commonly used in stereo vision and 3d reconstruction. Depth from stereo is a classic computer vision algorithm inspired by the human binocular vision system. Any point in the scene that is visible in both cameras. What are a disparity map and disparity image, and what is the difference between. Cameras Disparity Meaning.