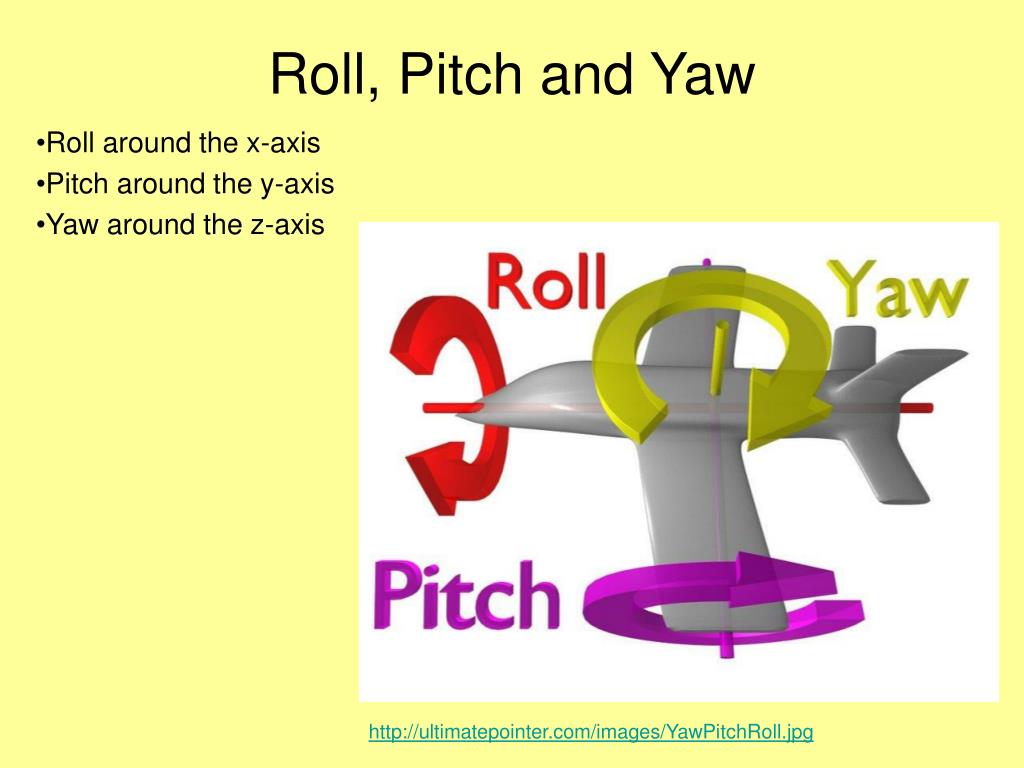
Eigen Quaternion To Yaw Pitch Roll . learn how to use quaternions to represent and apply 3d rotations efficiently. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); This paper explains the quaternion definition, how to. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all.
from www.slideserve.com
auto euler = q.torotationmatrix().eulerangles(0, 1, 2); we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. learn how to use quaternions to represent and apply 3d rotations efficiently. This paper explains the quaternion definition, how to. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all.
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899
Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. learn how to use quaternions to represent and apply 3d rotations efficiently. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); This paper explains the quaternion definition, how to. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. learn how to use quaternions to represent and apply 3d rotations efficiently. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle. Eigen Quaternion To Yaw Pitch Roll.
From tahaozel.com
Roll Pitch Yaw Nedir? Uçakların Hareket Eksenleri Eigen Quaternion To Yaw Pitch Roll for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. learn how to use quaternions to represent and apply 3d rotations efficiently. we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. Std::cout << euler from quaternion in roll, pitch,. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
2 RollPitchYaw Angles Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; for example, if. Eigen Quaternion To Yaw Pitch Roll.
From 9to5answer.com
[Solved] Roll pitch and yaw from Rotation matrix with 9to5Answer Eigen Quaternion To Yaw Pitch Roll roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. learn how to use quaternions to represent and. Eigen Quaternion To Yaw Pitch Roll.
From dxompsokn.blob.core.windows.net
Yaw Pitch And Roll Explained at Charles Fisher blog Eigen Quaternion To Yaw Pitch Roll Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; This paper explains the quaternion definition, how to. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. i'm trying to figure out how to transform a pose given with. Eigen Quaternion To Yaw Pitch Roll.
From www.slideserve.com
PPT Rotações e Quatérnios PowerPoint Presentation, free download ID5734032 Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. learn how to use quaternions to represent and apply 3d. Eigen Quaternion To Yaw Pitch Roll.
From pterneas.com
Kinect Joint Rotation The Definitive Guide Vangos Pterneas Eigen Quaternion To Yaw Pitch Roll Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. This paper explains the quaternion definition, how to. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation. Eigen Quaternion To Yaw Pitch Roll.
From siafstephenhoward.blogspot.com
3d roll pitch yaw Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around. Eigen Quaternion To Yaw Pitch Roll.
From sukesh.me
What is IMU and what are its use cases THE GEEK IN ME Eigen Quaternion To Yaw Pitch Roll learn how to use quaternions to represent and apply 3d rotations efficiently. we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. for example, if a. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Screenshot of an applet to visualize the relationship of yawpitchroll... Download Scientific Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. for. Eigen Quaternion To Yaw Pitch Roll.
From slideplayer.com
Lecturer Roi Yehoshua ppt download Eigen Quaternion To Yaw Pitch Roll we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. learn how to use quaternions to represent and apply 3d rotations efficiently. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; i'm trying to figure out how to transform a pose given with euler angles. Eigen Quaternion To Yaw Pitch Roll.
From aleksandarhaber.com
Clear Graphical and Mathematical Explanation of Yaw, Pitch and Roll Euler Angles Part 2 Eigen Quaternion To Yaw Pitch Roll i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; for example, if. Eigen Quaternion To Yaw Pitch Roll.
From ros-robotics.blogspot.com
Robot Operating System (ROS) Getting roll, pitch and yaw from Quaternion orientation as Eigen Quaternion To Yaw Pitch Roll roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); learn how to use quaternions to represent and apply 3d rotations efficiently. i'm trying to figure out how to transform a pose given with. Eigen Quaternion To Yaw Pitch Roll.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. learn how to use quaternions to represent and apply 3d rotations efficiently. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; i'm trying to. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll learn how to use quaternions to represent and apply 3d rotations efficiently. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; This paper explains the quaternion definition, how to. we can use. Eigen Quaternion To Yaw Pitch Roll.
From stackoverflow.com
python 3.x Quaternion to Yaw pitch roll Stack Overflow Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. This paper. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Euler angles obtained from the orientation quaternion, roll (blue),... Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. learn how to use quaternions to represent and apply 3d rotations efficiently. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β. Eigen Quaternion To Yaw Pitch Roll.
From blog.csdn.net
关于pitch、roll、 yaw的示意图和Laya.Quaternion.createFromYawPitchRoll用法CSDN博客 Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation. Eigen Quaternion To Yaw Pitch Roll.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Eigen Quaternion To Yaw Pitch Roll roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. learn how to use quaternions to represent and. Eigen Quaternion To Yaw Pitch Roll.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Eigen Quaternion To Yaw Pitch Roll learn how to use quaternions to represent and apply 3d rotations efficiently. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler <<. Eigen Quaternion To Yaw Pitch Roll.
From 9to5answer.com
[Solved] Using quaternion instead of roll, pitch and yaw 9to5Answer Eigen Quaternion To Yaw Pitch Roll we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. This paper explains the quaternion definition, how to. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. i'm trying to figure out how. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Euler angles obtained from the orientation quaternion, roll (blue),... Download Scientific Eigen Quaternion To Yaw Pitch Roll learn how to use quaternions to represent and apply 3d rotations efficiently. This paper explains the quaternion definition, how to. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. for example, if a quaternion represents 60,. Eigen Quaternion To Yaw Pitch Roll.
From www.slideserve.com
PPT Forward Kinematics PowerPoint Presentation, free download ID3199301 Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate. Eigen Quaternion To Yaw Pitch Roll.
From exohljfkj.blob.core.windows.net
Yaw Pitch Roll Orthodontics at Melony Harrelson blog Eigen Quaternion To Yaw Pitch Roll roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. learn how to use quaternions to represent and apply 3d rotations efficiently. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
9 Gimbals in a yaw, pitch, roll sequence 3 Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; learn how to use quaternions to represent and apply 3d rotations efficiently. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. This paper explains the quaternion. Eigen Quaternion To Yaw Pitch Roll.
From www.alamy.es
Roll pitch y yaw el plano del movimiento de cada canal semicircular Fotografía de stock Alamy Eigen Quaternion To Yaw Pitch Roll This paper explains the quaternion definition, how to. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. i'm trying to. Eigen Quaternion To Yaw Pitch Roll.
From www.freepik.es
Roll, pitch, yaw tres ángulos de rotación correspondientes a los ángulos de euler Vector Premium Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. Std::cout << euler from quaternion in roll, pitch,. Eigen Quaternion To Yaw Pitch Roll.
From www.smlease.com
Mechanical Design Basics Archives SMLease Design Eigen Quaternion To Yaw Pitch Roll for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. This paper explains the quaternion definition, how to. i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. Std::cout << euler from quaternion in roll,. Eigen Quaternion To Yaw Pitch Roll.
From www.victoriana.com
Navigation Mädchen Bäume pflanzen roll pitch yaw quaternion Raserei Verwirrt einzig und allein Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. we. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Euler sequence (a) Yaw; (b) Pitch; and (c) Roll. Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Pitch, Roll and Yaw Against the XYZ Axis, own figure Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; auto euler = q.torotationmatrix().eulerangles(0, 1, 2); This paper explains the quaternion definition, how to. learn how to use quaternions to represent and apply 3d rotations efficiently.. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω,... Download Scientific Eigen Quaternion To Yaw Pitch Roll we can use quaternions, euler angles, and rotation matrices in eigen to demonstrate how they are transformed. for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); learn how to use quaternions to represent and apply 3d rotations efficiently. Std::cout. Eigen Quaternion To Yaw Pitch Roll.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Presentation ID4813899 Eigen Quaternion To Yaw Pitch Roll for example, if a quaternion represents 60, 45, 45 (degree) in yaw, pitch, roll order orientation, i want a quaternion. auto euler = q.torotationmatrix().eulerangles(0, 1, 2); i'm trying to figure out how to transform a pose given with euler angles roll (righthanded around x axis), pitch (righthanded around y. learn how to use quaternions to represent. Eigen Quaternion To Yaw Pitch Roll.
From www.researchgate.net
Yaw, pitch and roll rotations of a Quadcopter [7]. Download Scientific Diagram Eigen Quaternion To Yaw Pitch Roll learn how to use quaternions to represent and apply 3d rotations efficiently. roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; we can use quaternions, euler. Eigen Quaternion To Yaw Pitch Roll.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Matrices and Python Code Eigen Quaternion To Yaw Pitch Roll auto euler = q.torotationmatrix().eulerangles(0, 1, 2); roll pitch yaw (rpy) convention rotation about x0 of angle γ + rotation about y0 of angle β + rotation about z0 of angle α all. Std::cout << euler from quaternion in roll, pitch, yaw<< std::endl << euler << std::endl; for example, if a quaternion represents 60, 45, 45 (degree) in. Eigen Quaternion To Yaw Pitch Roll.