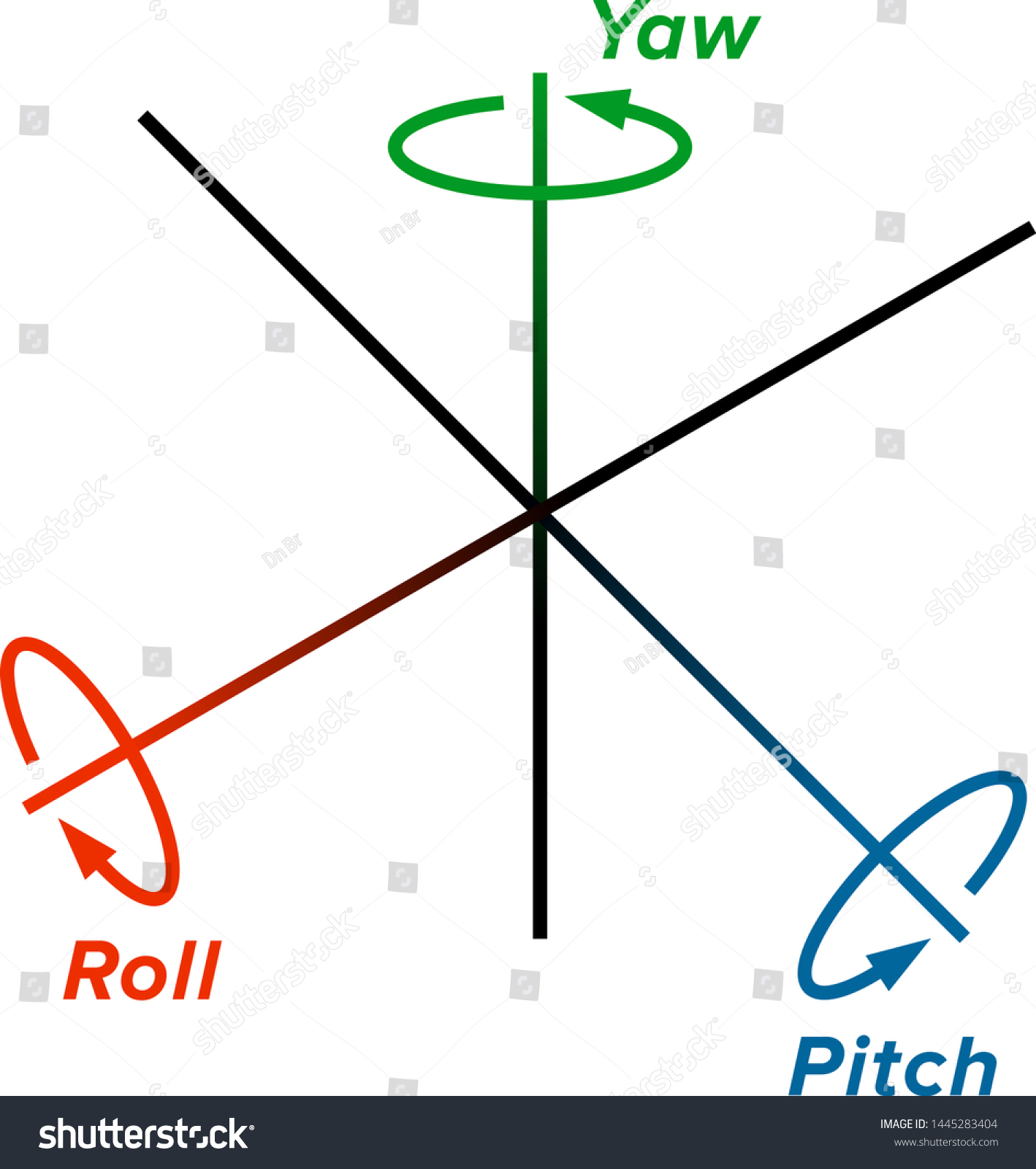
Yaw Pitch Roll Angle Calculation . Pitch, roll and yaw are defined as the rotation around x, y and z axis. There are 3 basic rotations an aircraft can make: Roll pitch yaw (rpy) convention. This function calculates the 3d. Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. This function calculates the 3d rotation of a body/vector with euler angles according to the. In a previous project i used a adxl345 accelerometer from analog devices to calculate. Online calculator to convert euler angles to a rotation matrix. All rotations are about fixed. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix.
from www.shutterstock.com
In a previous project i used a adxl345 accelerometer from analog devices to calculate. All rotations are about fixed. Below as a picture to illustrate the definition. Online calculator to convert euler angles to a rotation matrix. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. There are 3 basic rotations an aircraft can make: Pitch, roll and yaw are defined as the rotation around x, y and z axis. This function calculates the 3d. This function calculates the 3d rotation of a body/vector with euler angles according to the. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix.
Roll Pitch Yaw Three Rotation Angles vector de stock (libre de
Yaw Pitch Roll Angle Calculation Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Online calculator to convert euler angles to a rotation matrix. This function calculates the 3d. This function calculates the 3d rotation of a body/vector with euler angles according to the. There are 3 basic rotations an aircraft can make: In a previous project i used a adxl345 accelerometer from analog devices to calculate. Roll pitch yaw (rpy) convention. All rotations are about fixed. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Below as a picture to illustrate the definition.
From www.researchgate.net
yaw, pitch & roll angles vs time Download Scientific Diagram Yaw Pitch Roll Angle Calculation Recall from trigonometry tan(angle) = opposite / adjacent, and solving. There are 3 basic rotations an aircraft can make: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d. This function calculates the 3d rotation of a body/vector with euler angles according to the. All. Yaw Pitch Roll Angle Calculation.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Yaw Pitch Roll Angle Calculation All rotations are about fixed. This function calculates the 3d rotation of a body/vector with euler angles according to the. This function calculates the 3d. Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer from analog devices to calculate. There are 3 basic rotations an aircraft can make: Online calculator for calculating. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Pitch, yaw and roll in X, Y, and Z axes Download Scientific Diagram Yaw Pitch Roll Angle Calculation Below as a picture to illustrate the definition. Roll pitch yaw (rpy) convention. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. This function calculates the 3d rotation of a body/vector with euler angles according to the.. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
In above mentioned diagram (a) head pose rotation angle shows yaw roll Yaw Pitch Roll Angle Calculation There are 3 basic rotations an aircraft can make: Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Roll pitch yaw (rpy) convention. In a previous project i used a adxl345 accelerometer from analog devices to calculate. This function calculates the 3d rotation of a body/vector with euler angles according to the. Below as a picture to illustrate the. Yaw Pitch Roll Angle Calculation.
From 9to5answer.com
[Solved] Roll, pitch, yaw calculation 9to5Answer Yaw Pitch Roll Angle Calculation There are 3 basic rotations an aircraft can make: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. All rotations are about. Yaw Pitch Roll Angle Calculation.
From www.showme.com
2.7.2 roll pitch yaw angles Science, Kinematics ShowMe Yaw Pitch Roll Angle Calculation All rotations are about fixed. There are 3 basic rotations an aircraft can make: Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0 of. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
Lecture 2 2.3 Roll, Pitch, Yaw angles (Robotics UTEC 20181) YouTube Yaw Pitch Roll Angle Calculation In a previous project i used a adxl345 accelerometer from analog devices to calculate. There are 3 basic rotations an aircraft can make: Below as a picture to illustrate the definition. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0 of. Yaw Pitch Roll Angle Calculation.
From www.shutterstock.com
Roll Pitch Yaw Three Rotation Angles vector de stock (libre de Yaw Pitch Roll Angle Calculation Online calculator to convert euler angles to a rotation matrix. This function calculates the 3d rotation of a body/vector with euler angles according to the. Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d. Pitch, roll. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
Pitch, Roll and Yaw in Orthodontics kapdentlectures YouTube Yaw Pitch Roll Angle Calculation All rotations are about fixed. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Below as a picture to illustrate the definition. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Pitch, roll and yaw are defined as the rotation around. Yaw Pitch Roll Angle Calculation.
From www.xsimulator.net
Request (Feature) Why the rotations(pitch,yaw and roll)are angles in Yaw Pitch Roll Angle Calculation Roll pitch yaw (rpy) convention. All rotations are about fixed. This function calculates the 3d rotation of a body/vector with euler angles according to the. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d. Recall from trigonometry tan(angle) = opposite / adjacent, and solving.. Yaw Pitch Roll Angle Calculation.
From www.smlease.com
What is the difference between Roll Pitch Yaw Aircraft Motions Yaw Pitch Roll Angle Calculation In a previous project i used a adxl345 accelerometer from analog devices to calculate. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. All rotations are about fixed. Below as a picture. Yaw Pitch Roll Angle Calculation.
From stackoverflow.com
3d Roll, pitch, yaw calculation Stack Overflow Yaw Pitch Roll Angle Calculation Roll pitch yaw (rpy) convention. Online calculator to convert euler angles to a rotation matrix. In a previous project i used a adxl345 accelerometer from analog devices to calculate. Below as a picture to illustrate the definition. This function calculates the 3d. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Rotation about x0. Yaw Pitch Roll Angle Calculation.
From www.vectorstock.com
Roll pitch yaw three rotation angles Royalty Free Vector Yaw Pitch Roll Angle Calculation In a previous project i used a adxl345 accelerometer from analog devices to calculate. Roll pitch yaw (rpy) convention. Online calculator to convert euler angles to a rotation matrix. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Below as a picture to illustrate the definition. This function calculates the 3d rotation. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
(a) Pitch, yaw and roll angles of an aircraft with body orientation [Ω Yaw Pitch Roll Angle Calculation Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d rotation of a body/vector with euler angles according to the. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This function. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
RollPitchYaw Angles in Robotics Fundamentals of Robotics Lesson Yaw Pitch Roll Angle Calculation Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. There are 3 basic rotations an aircraft can make: Online calculator to convert euler angles to a rotation matrix. In a previous project i used a adxl345 accelerometer from analog devices to calculate. This function calculates the 3d rotation of a body/vector with. Yaw Pitch Roll Angle Calculation.
From www.chegg.com
Solved Question 1) Calculate the roll, pitch and yaw angles Yaw Pitch Roll Angle Calculation This function calculates the 3d rotation of a body/vector with euler angles according to the. There are 3 basic rotations an aircraft can make: Roll pitch yaw (rpy) convention. All rotations are about fixed. Online calculator to convert euler angles to a rotation matrix. Below as a picture to illustrate the definition. Rotation about x0 of angle g + rotation. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Roll, pitch and yaw angles, φ, θ, ψ, with respect to the angle inputs Yaw Pitch Roll Angle Calculation Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. There are 3 basic rotations an aircraft can make: This function calculates the 3d rotation of a body/vector with euler angles according to the. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Roll pitch yaw (rpy) convention. Rotation about x0 of. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
2 RollPitchYaw Angles Download Scientific Diagram Yaw Pitch Roll Angle Calculation This function calculates the 3d rotation of a body/vector with euler angles according to the. This function calculates the 3d. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. There are 3 basic rotations an aircraft can make: Roll pitch yaw (rpy) convention. Below as a picture to illustrate. Yaw Pitch Roll Angle Calculation.
From automaticaddison.com
Yaw, Pitch, and Roll Diagrams Using 2D Coordinate Systems Automatic Yaw Pitch Roll Angle Calculation This function calculates the 3d. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. This function calculates the 3d rotation of a body/vector with euler angles according to the. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Below as a picture to illustrate the definition. In a previous project i. Yaw Pitch Roll Angle Calculation.
From space.stackexchange.com
artificial satellite Determine Yaw, Pitch, Roll from two vectors Yaw Pitch Roll Angle Calculation This function calculates the 3d rotation of a body/vector with euler angles according to the. All rotations are about fixed. Below as a picture to illustrate the definition. This function calculates the 3d. In a previous project i used a adxl345 accelerometer from analog devices to calculate. Roll pitch yaw (rpy) convention. Recall from trigonometry tan(angle) = opposite / adjacent,. Yaw Pitch Roll Angle Calculation.
From www.fuyumotion.com
Motion basics How to define roll, pitch, and yaw for linear systems Yaw Pitch Roll Angle Calculation Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Below as a picture to illustrate the definition. Roll pitch yaw (rpy) convention. All rotations are about fixed. This function calculates the 3d. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Online calculator for calculating the rotation around. Yaw Pitch Roll Angle Calculation.
From aleksandarhaber.com
Clear Graphical and Mathematical Explanation of Yaw, Pitch and Roll Yaw Pitch Roll Angle Calculation There are 3 basic rotations an aircraft can make: Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Below as a picture to illustrate the definition. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. All rotations are about fixed. Roll pitch yaw (rpy) convention. Pitch, roll and yaw are defined. Yaw Pitch Roll Angle Calculation.
From www.slideserve.com
PPT 3D Kinematics PowerPoint Presentation, free download ID5159940 Yaw Pitch Roll Angle Calculation Roll pitch yaw (rpy) convention. All rotations are about fixed. Online calculator to convert euler angles to a rotation matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This function calculates the 3d. Yaw Pitch Roll Angle Calculation.
From github.com
Angle calculation · Issue 16 · jerryhouuu/FaceYawRollPitchfrom Yaw Pitch Roll Angle Calculation Online calculator to convert euler angles to a rotation matrix. Pitch, roll and yaw are defined as the rotation around x, y and z axis. There are 3 basic rotations an aircraft can make: This function calculates the 3d. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. In a previous project i used a adxl345 accelerometer from analog. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
Measure Pitch Roll and Yaw Angles Using MPU6050 and Arduino YouTube Yaw Pitch Roll Angle Calculation Pitch, roll and yaw are defined as the rotation around x, y and z axis. In a previous project i used a adxl345 accelerometer from analog devices to calculate. There are 3 basic rotations an aircraft can make: Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Roll pitch. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
What is the total value of Yaw and Roll moment on vehicle Yaw Pitch Roll Angle Calculation Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d rotation of a body/vector with euler angles according to the. All rotations are about fixed. This function calculates the 3d. Below as a picture to. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Screenshot of an applet to visualize the relationship of yawpitchroll Yaw Pitch Roll Angle Calculation Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer from analog devices to calculate. This function calculates the 3d. This function calculates the 3d rotation of a body/vector with euler angles according to the. Rotation about x0 of angle g + rotation. Yaw Pitch Roll Angle Calculation.
From blog.csdn.net
pitch yaw roll是什么_yaw pitch rollCSDN博客 Yaw Pitch Roll Angle Calculation Pitch, roll and yaw are defined as the rotation around x, y and z axis. All rotations are about fixed. This function calculates the 3d rotation of a body/vector with euler angles according to the. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Rotation about x0 of angle g + rotation about y0 of angle b + rotation. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Yaw Pitch Roll Angle Calculation All rotations are about fixed. There are 3 basic rotations an aircraft can make: This function calculates the 3d. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Roll pitch yaw (rpy) convention. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Online calculator to convert euler angles to a rotation. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Yaw angle δ and pitch angle γ for deflection and slope of the toroidal Yaw Pitch Roll Angle Calculation Roll pitch yaw (rpy) convention. Online calculator to convert euler angles to a rotation matrix. Pitch, roll and yaw are defined as the rotation around x, y and z axis. All rotations are about fixed. This function calculates the 3d rotation of a body/vector with euler angles according to the. Online calculator for calculating the rotation around the x, y. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
2 RollPitchYaw Angles Download Scientific Diagram Yaw Pitch Roll Angle Calculation Online calculator to convert euler angles to a rotation matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Pitch, roll and yaw are defined as the rotation around x, y and z axis. This function calculates the 3d. Recall from trigonometry tan(angle) = opposite / adjacent, and solving.. Yaw Pitch Roll Angle Calculation.
From www.slideserve.com
PPT Roll, Pitch and Yaw 3D rotation matrices PowerPoint Yaw Pitch Roll Angle Calculation Below as a picture to illustrate the definition. Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. Pitch, roll and yaw are defined as the rotation around x, y and z axis.. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Yaw and pitch angles governing the motion of a UAV (the roll angle is Yaw Pitch Roll Angle Calculation Online calculator for calculating the rotation around the x, y and z axes of a 3x3 matrix. Roll pitch yaw (rpy) convention. This function calculates the 3d rotation of a body/vector with euler angles according to the. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Recall from trigonometry tan(angle) = opposite / adjacent,. Yaw Pitch Roll Angle Calculation.
From www.researchgate.net
Average roll, pitch, and yaw angles. Download Scientific Diagram Yaw Pitch Roll Angle Calculation Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. There are 3 basic rotations an aircraft can make: All rotations are about fixed. Recall from trigonometry tan(angle) = opposite / adjacent, and solving. Pitch, roll and yaw are defined as the rotation around x, y and z axis. Online. Yaw Pitch Roll Angle Calculation.
From www.youtube.com
Yaw pitch roll angles calculation using acceleration and gyroscope Yaw Pitch Roll Angle Calculation This function calculates the 3d rotation of a body/vector with euler angles according to the. Roll pitch yaw (rpy) convention. Online calculator to convert euler angles to a rotation matrix. Rotation about x0 of angle g + rotation about y0 of angle b + rotation about z0 of angle a. This function calculates the 3d. In a previous project i. Yaw Pitch Roll Angle Calculation.