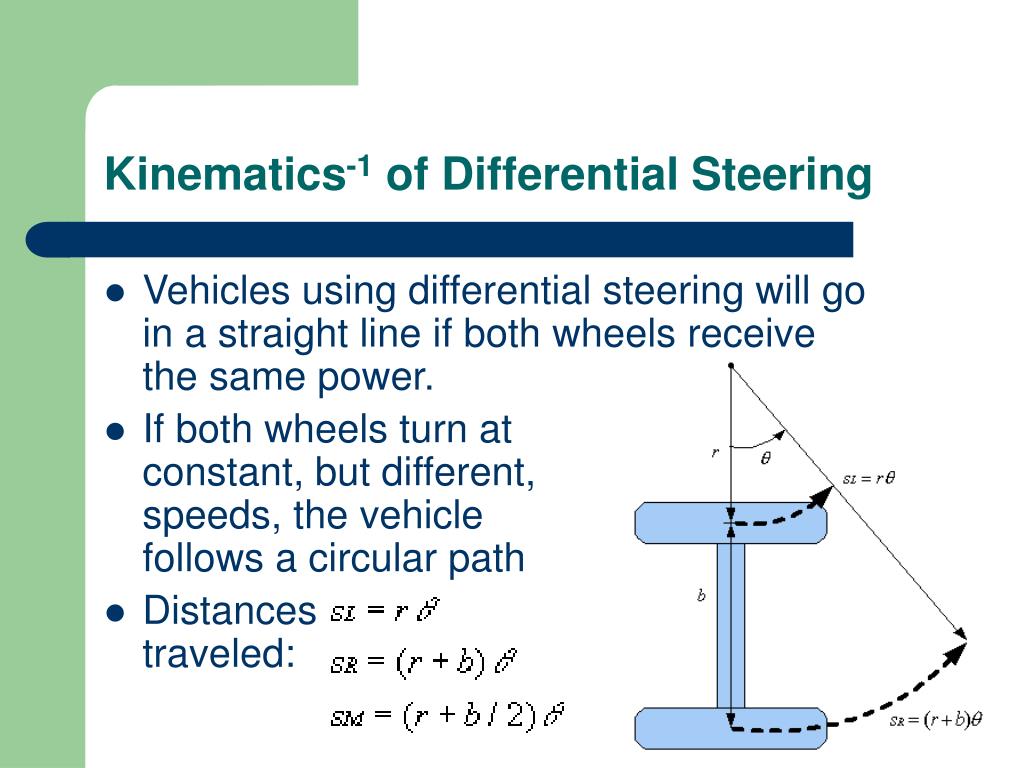
Differential Steering Kinematics . Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. These two equations define the inverse velocity kinematics for our ddr: Our logistics robot had super simple kinematics: Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\).
from www.slideserve.com
These two equations define the inverse velocity kinematics for our ddr: Our logistics robot had super simple kinematics: Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism known as differential drive. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots.
PPT Introduction to Robotics PowerPoint Presentation, free download
Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). Our logistics robot had super simple kinematics: The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: It consists of 2 drive wheels. Kinematics of differential drive robots. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. It consists of 2 drive wheels. These two equations define the inverse velocity kinematics for our ddr: Many mobile robots use a drive mechanism known as differential drive. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism known as differential drive.
From www.slideserve.com
PPT Introduction to Robotics PowerPoint Presentation, free download Differential Steering Kinematics These two equations define the inverse velocity kinematics for our ddr: It consists of 2 drive wheels. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism known as differential drive. The forward kinematics equations for a robot (or other vehicle) with differential drive are. Differential Steering Kinematics.
From www.scribd.com
Evaluation of Trajectory Model For Differential Steering Using Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. These two equations define the inverse velocity kinematics for our ddr: Our logistics robot had super simple kinematics: It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. The forward kinematics equations. Differential Steering Kinematics.
From www.youtube.com
CATIA V5 KINEMATICS Steering Mechanism Recirculating Ball Steering Differential Steering Kinematics It consists of 2 drive wheels. Kinematics of differential drive robots. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. Our logistics robot had super simple kinematics: The equations in these notes. Differential Steering Kinematics.
From www.slideserve.com
PPT Introduction to Robotics PowerPoint Presentation, free download Differential Steering Kinematics Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Our logistics robot had super simple kinematics: These two equations define the inverse velocity kinematics for our ddr: Many mobile robots use a drive mechanism known as differential drive. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\). Differential Steering Kinematics.
From www.semanticscholar.org
[PDF] Differential speed steering control for fourwheel independent Differential Steering Kinematics Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. These two equations define the. Differential Steering Kinematics.
From www.semanticscholar.org
Figure 1 from Kinematic analysis of a twodegreeoffreedom steering Differential Steering Kinematics Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism known as differential drive. These two equations define the inverse velocity kinematics for our ddr: Kinematics of differential drive robots. Many mobile robots use a drive mechanism known as differential drive. The equations in these. Differential Steering Kinematics.
From www.researchgate.net
Geometric equivalence between the wheeled skidsteering robot and the Differential Steering Kinematics These two equations define the inverse velocity kinematics for our ddr: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Our logistics robot had super simple. Differential Steering Kinematics.
From www.researchgate.net
Kinematic model of an automobile with Ackerman steering. The control Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. It consists of 2 drive wheels. Our logistics robot had super simple kinematics: Assuming smooth rolling motion at each point in time the differential drive is moving in. Differential Steering Kinematics.
From www.youtube.com
Differential Kinematics Part 1 YouTube Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Many mobile robots use a drive mechanism known as differential drive. Many mobile robots use a drive mechanism known. Differential Steering Kinematics.
From www.youtube.com
Kinematics of Differential Drive Robots and Odometry YouTube Differential Steering Kinematics Kinematics of differential drive robots. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). The equations in these notes provide a an elementary model for the differentially steered drive system (which is often. Differential Steering Kinematics.
From www.mdpi.com
Energies Free FullText Differential Steering Control of FourWheel Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Many mobile robots use a drive mechanism known as differential drive. Our logistics robot had super simple kinematics: The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: It. Differential Steering Kinematics.
From www.researchgate.net
Steering kinematics model of a semitrailer. Download Scientific Diagram Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Kinematics of differential drive robots. These two equations define the inverse velocity kinematics for our ddr: The forward kinematics equations for a robot (or other vehicle) with differential. Differential Steering Kinematics.
From www.researchgate.net
The vehicle steering kinematics model Download Scientific Diagram Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). Many mobile robots use a drive mechanism known as differential drive. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to. Differential Steering Kinematics.
From www.slideserve.com
PPT Introduction to Robotics PowerPoint Presentation, free download Differential Steering Kinematics The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. Many mobile. Differential Steering Kinematics.
From www.researchgate.net
Front wheel steering kinematics model of the four‐wheeled off‐road Differential Steering Kinematics Kinematics of differential drive robots. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. It. Differential Steering Kinematics.
From www.racecar-engineering.com
Tech Explained Ackermann Steering Geometry Racecar Engineering Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. It consists of 2 drive wheels. These two equations define the inverse velocity kinematics for our ddr: Kinematics of differential drive. Differential Steering Kinematics.
From www.youtube.com
Kinematic Equation for Differential Drive YouTube Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Our logistics robot had super simple kinematics: Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to. Differential Steering Kinematics.
From www.mdpi.com
Sensors Free FullText Analysis and Experimental Kinematics of a Differential Steering Kinematics Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. The forward kinematics equations for a. Differential Steering Kinematics.
From www.researchgate.net
Differential steering system.... Download Scientific Diagram Differential Steering Kinematics Our logistics robot had super simple kinematics: It consists of 2 drive wheels. It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). The forward kinematics equations for a robot (or other. Differential Steering Kinematics.
From www.researchgate.net
Ideal relationship of the angle between the two sides of steering Differential Steering Kinematics These two equations define the inverse velocity kinematics for our ddr: It consists of 2 drive wheels. Our logistics robot had super simple kinematics: Kinematics of differential drive robots. It consists of 2 drive wheels. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. The forward kinematics equations for a robot. Differential Steering Kinematics.
From journals.sagepub.com
Differential steeringbased electric vehicle lateral dynamics control Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Kinematics of differential drive robots. Given a desired output specified by. Differential Steering Kinematics.
From www.slideserve.com
PPT Introduction to Robotics PowerPoint Presentation, free download Differential Steering Kinematics These two equations define the inverse velocity kinematics for our ddr: Many mobile robots use a drive mechanism known as differential drive. Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. It consists of 2 drive wheels. The forward kinematics equations for a robot (or other vehicle) with differential drive are used. Differential Steering Kinematics.
From www.researchgate.net
A frontwheelsteering vehicle and steer angles of the inner and outer Differential Steering Kinematics Our logistics robot had super simple kinematics: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). Many mobile robots use a drive mechanism known as differential drive. Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. The forward kinematics equations for a robot (or other. Differential Steering Kinematics.
From www.slideserve.com
PPT Introduction to Robotics PowerPoint Presentation, free download Differential Steering Kinematics It consists of 2 drive wheels. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Kinematics of differential drive robots. Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). These two equations define the inverse velocity kinematics for our ddr: It consists. Differential Steering Kinematics.
From www.semanticscholar.org
Figure 2 from Kinematics Equations for Differential Drive and Differential Steering Kinematics The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Kinematics of differential drive robots. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels.. Differential Steering Kinematics.
From www.academia.edu
(PDF) IJERTKinematic Analysis of 4axle Steering System of Articulated Differential Steering Kinematics Kinematics of differential drive robots. It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. These two equations define the inverse velocity kinematics for our ddr: Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. The equations in these notes provide a an elementary model. Differential Steering Kinematics.
From www.researchgate.net
2 Basic principle of differential steering (a) straight run and (b Differential Steering Kinematics Kinematics of differential drive robots. Our logistics robot had super simple kinematics: The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). It consists of 2 drive wheels. These two equations define the inverse. Differential Steering Kinematics.
From slidetodoc.com
Steering System Ackerman Linkage geometry Road wheel geometry Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Many. Differential Steering Kinematics.
From www.scribd.com
d6t TrackType Tractor STD, XL Differential Steering Gct00001Up Differential Steering Kinematics It consists of 2 drive wheels. Kinematics of differential drive robots. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. These two equations define the inverse velocity kinematics for our ddr: The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve. Differential Steering Kinematics.
From www.youtube.com
Differential Steering YouTube Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Our logistics robot had super simple kinematics: Kinematics of differential drive. Differential Steering Kinematics.
From www.semanticscholar.org
[PDF] Differential speed steering control for fourwheel independent Differential Steering Kinematics It consists of 2 drive wheels. Many mobile robots use a drive mechanism known as differential drive. Our logistics robot had super simple kinematics: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem:. Differential Steering Kinematics.
From www.mdpi.com
Applied Sciences Free FullText A Control Method for the Differential Steering Kinematics The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: Given a desired output specified by \(v\) and \(\omega\), determine the required \(input\) specified as \(\dot{\phi}_r\). Many mobile robots. Differential Steering Kinematics.
From www.youtube.com
Detailed and Correct Derivation of Kinematics Equations of Differential Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. Kinematics of differential drive robots. It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Assuming smooth rolling motion at each point in time the differential drive is moving in a circular. Differential Steering Kinematics.
From www.mdpi.com
Electronics Free FullText Longitudinal and Lateral Stability Differential Steering Kinematics It consists of 2 drive wheels. Kinematics of differential drive robots. Our logistics robot had super simple kinematics: It consists of 2 drive wheels. These two equations define the inverse velocity kinematics for our ddr: Assuming smooth rolling motion at each point in time the differential drive is moving in a circular path. Many mobile robots use a drive mechanism. Differential Steering Kinematics.
From www.researchgate.net
Control of a mobile robot with differential kinematics. velocities {u Differential Steering Kinematics Many mobile robots use a drive mechanism known as differential drive. The forward kinematics equations for a robot (or other vehicle) with differential drive are used to solve the following problem: It consists of 2 drive wheels. The equations in these notes provide a an elementary model for the differentially steered drive system (which is often called a. Given a. Differential Steering Kinematics.