Prismatic Joint Rotation . Consider the robot arm below, for example: The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. For prismatic joints, the one dof is a translation along the axis relative to its. In other words, one link slides on the other. A prismatic joint is a connection between two objects that allows relative motion along a single axis. Motion that’s perpendicular to this axis (or rotation about any axis) is. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. These actuators are movable parts and cause relative motion between the two links it connects. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. The first fundamental robot joint is the prismatic joint. This is a joint that corresponds to a pure translational motion.
from www.wevolver.com
Motion that’s perpendicular to this axis (or rotation about any axis) is. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. The first fundamental robot joint is the prismatic joint. This is a joint that corresponds to a pure translational motion. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. A prismatic joint is a connection between two objects that allows relative motion along a single axis. Consider the robot arm below, for example: These actuators are movable parts and cause relative motion between the two links it connects.
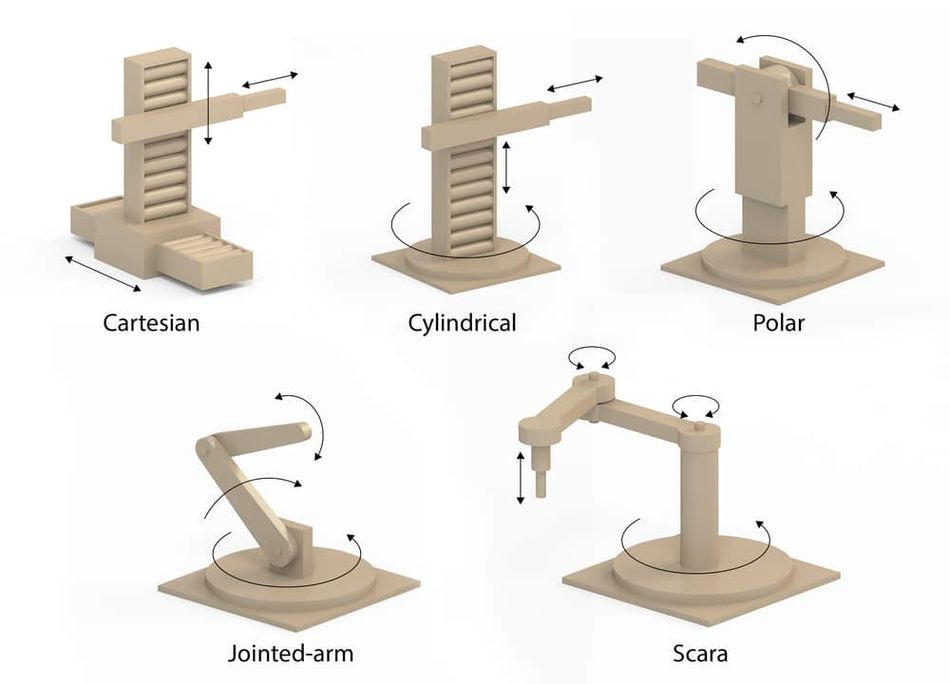
What are manipulator robots? Understanding their Design, Types, and
Prismatic Joint Rotation Motion that’s perpendicular to this axis (or rotation about any axis) is. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Consider the robot arm below, for example: These actuators are movable parts and cause relative motion between the two links it connects. For prismatic joints, the one dof is a translation along the axis relative to its. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. The first fundamental robot joint is the prismatic joint. Motion that’s perpendicular to this axis (or rotation about any axis) is. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. This is a joint that corresponds to a pure translational motion. A prismatic joint is a connection between two objects that allows relative motion along a single axis. In other words, one link slides on the other.
From www.slideserve.com
PPT Sa ME 192 Lecture 8/27/14 San Jose State University Overview Prismatic Joint Rotation For prismatic joints, the one dof is a translation along the axis relative to its. Motion that’s perpendicular to this axis (or rotation about any axis) is. In other words, one link slides on the other. Consider the robot arm below, for example: Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p). Prismatic Joint Rotation.
From www.chegg.com
Solved FConsider a cylindrical manipulator. It has three Prismatic Joint Rotation Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Consider the robot arm below, for example: The first fundamental robot joint is the prismatic joint. A prismatic joint is a connection between two objects that allows relative motion along a single axis. Two types of joints, prismatic and revolute joints, constitute. Prismatic Joint Rotation.
From www.researchgate.net
A 3DoFs manipulator which has two revolute joints and one prismatic Prismatic Joint Rotation In other words, one link slides on the other. This is a joint that corresponds to a pure translational motion. The first fundamental robot joint is the prismatic joint. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Consider the robot arm below, for example: Motion that’s perpendicular to this. Prismatic Joint Rotation.
From www.researchgate.net
The Dove prism rotation axis (RA) is perpendicular to the prism Prismatic Joint Rotation Motion that’s perpendicular to this axis (or rotation about any axis) is. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. In other words, one link slides on the other. The first fundamental robot joint is the prismatic joint. The first is a prismatic joint where the pair of links makes. Prismatic Joint Rotation.
From www.youtube.com
SIMULATION OF A ROTATIONAL AND PRISMATIC JOINT IN MATLAB YouTube Prismatic Joint Rotation The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. Motion that’s perpendicular to this axis (or rotation about any axis) is. This is a joint that corresponds. Prismatic Joint Rotation.
From www.chegg.com
PART IV. DH TRaNsFORMS FOR PRISMATIC JOINTS Consider Prismatic Joint Rotation In other words, one link slides on the other. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the two links it connects. The first fundamental robot joint is the prismatic joint. A prismatic joint is a connection between two objects. Prismatic Joint Rotation.
From medium.com
Degrees of freedom of a Robot. Until now , we covered the… by khalil Prismatic Joint Rotation For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. In other words,. Prismatic Joint Rotation.
From www.researchgate.net
1 Manipulator with Revolute and Prismatic Joints [1] Download Prismatic Joint Rotation Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. For prismatic joints, the one dof is a translation. Prismatic Joint Rotation.
From momdyn.github.io
Joints momdyn 2.0.0 documentation Prismatic Joint Rotation Consider the robot arm below, for example: A prismatic joint is a connection between two objects that allows relative motion along a single axis. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero. Prismatic Joint Rotation.
From www.youtube.com
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P3 (Rotation Matrix Prismatic Joint Rotation For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. This is a. Prismatic Joint Rotation.
From www.chegg.com
Solved rotational and; joints 2 and 3 are prismatic. The Prismatic Joint Rotation The first fundamental robot joint is the prismatic joint. For prismatic joints, the one dof is a translation along the axis relative to its. Consider the robot arm below, for example: This is a joint that corresponds to a pure translational motion. A prismatic joint is a connection between two objects that allows relative motion along a single axis. In. Prismatic Joint Rotation.
From www.numerade.com
SOLVED Given a fourjoint robot arm in the following figure. The first Prismatic Joint Rotation Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. Motion that’s perpendicular to this axis (or rotation about any axis) is. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Consider the robot arm below, for example: This is a joint that corresponds to a. Prismatic Joint Rotation.
From www.numerade.com
VIDEO solution The figure below shows a robot having four degrees of Prismatic Joint Rotation For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. This is a joint that corresponds to a pure translational motion. The first fundamental robot joint is the. Prismatic Joint Rotation.
From www.researchgate.net
Illustration to show how a fourbar linkage mechanism is presented by Prismatic Joint Rotation Consider the robot arm below, for example: These actuators are movable parts and cause relative motion between the two links it connects. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. A prismatic joint is a connection between two objects that allows relative motion along a. Prismatic Joint Rotation.
From www.numerade.com
SOLVED Shown below is a construction robot having two revolute joints Prismatic Joint Rotation The first fundamental robot joint is the prismatic joint. Consider the robot arm below, for example: A prismatic joint is a connection between two objects that allows relative motion along a single axis. Motion that’s perpendicular to this axis (or rotation about any axis) is. This is a joint that corresponds to a pure translational motion. Two types of joints,. Prismatic Joint Rotation.
From www.researchgate.net
The twoDOF robot manipulator with revolute and prismatic joints used Prismatic Joint Rotation Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Motion that’s perpendicular to this axis (or rotation about any axis) is. This is a joint that corresponds to a pure translational motion. These actuators are movable parts and cause relative motion between the two links it connects. Two types of joints,. Prismatic Joint Rotation.
From imgbin.com
Prismatic Joint Degrees Of Freedom Rotation Motion PNG, Clipart, Angle Prismatic Joint Rotation In other words, one link slides on the other. These actuators are movable parts and cause relative motion between the two links it connects. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. The first fundamental robot joint is the prismatic joint. Two types of joints,. Prismatic Joint Rotation.
From www.chegg.com
Solved Determine the mobility of the following mechanical Prismatic Joint Rotation In other words, one link slides on the other. For prismatic joints, the one dof is a translation along the axis relative to its. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. The first fundamental robot joint is the prismatic joint. Each joint, like the elbow, can be classified. Prismatic Joint Rotation.
From www.youtube.com
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices Prismatic Joint Rotation These actuators are movable parts and cause relative motion between the two links it connects. Consider the robot arm below, for example: The first fundamental robot joint is the prismatic joint. For prismatic joints, the one dof is a translation along the axis relative to its. For revolute joints, the one dof is a joint angle defining the offset from. Prismatic Joint Rotation.
From www.numerade.com
Shown below is a construction robot having two revolute joints and one Prismatic Joint Rotation For prismatic joints, the one dof is a translation along the axis relative to its. This is a joint that corresponds to a pure translational motion. Motion that’s perpendicular to this axis (or rotation about any axis) is. A prismatic joint is a connection between two objects that allows relative motion along a single axis. The first is a prismatic. Prismatic Joint Rotation.
From www.wevolver.com
What are manipulator robots? Understanding their Design, Types, and Prismatic Joint Rotation These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. This is a joint that corresponds to a pure translational motion. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. Consider. Prismatic Joint Rotation.
From www.researchgate.net
CPC modeling convention for a prismatic joint. Download Scientific Prismatic Joint Rotation For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. This is a joint that corresponds to a pure translational motion. These actuators are movable parts and cause relative motion between the two links it connects. A prismatic joint is a connection between two objects that allows. Prismatic Joint Rotation.
From www.researchgate.net
Conventional prismatic joint. Download Scientific Diagram Prismatic Joint Rotation For prismatic joints, the one dof is a translation along the axis relative to its. Motion that’s perpendicular to this axis (or rotation about any axis) is. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. A prismatic joint is a connection between two objects that allows relative motion along a single axis. These actuators. Prismatic Joint Rotation.
From www.researchgate.net
Full and half joints As shown in Figure 1, revolute pairs or prismatic Prismatic Joint Rotation Consider the robot arm below, for example: This is a joint that corresponds to a pure translational motion. In other words, one link slides on the other. Motion that’s perpendicular to this axis (or rotation about any axis) is. For prismatic joints, the one dof is a translation along the axis relative to its. These actuators are movable parts and. Prismatic Joint Rotation.
From www.slideserve.com
PPT Kinematic (stick or skeleton) Diagrams PowerPoint Presentation Prismatic Joint Rotation Consider the robot arm below, for example: In other words, one link slides on the other. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. Each joint, like the elbow, can be classified as a revolute. Prismatic Joint Rotation.
From www.youtube.com
Understand prismatic joint and how it affects the degrees of freedom in Prismatic Joint Rotation For prismatic joints, the one dof is a translation along the axis relative to its. A prismatic joint is a connection between two objects that allows relative motion along a single axis. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. Each joint, like the elbow,. Prismatic Joint Rotation.
From www.numerade.com
SOLVED 1. A threelink manipulator with rotational joints and Prismatic Joint Rotation These actuators are movable parts and cause relative motion between the two links it connects. For prismatic joints, the one dof is a translation along the axis relative to its. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. For revolute joints, the one dof is a joint angle defining the offset from a joint's. Prismatic Joint Rotation.
From altair.com
Thought Leader Thursday The Evolution of CAE Modeling From Solver Prismatic Joint Rotation Consider the robot arm below, for example: In other words, one link slides on the other. Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. These actuators are movable parts and cause relative motion between the two links it connects. The first is a prismatic joint where the pair of links makes a translational displacement. Prismatic Joint Rotation.
From www.researchgate.net
Prismatic joint in the reference and deformed con®gurations. Download Prismatic Joint Rotation This is a joint that corresponds to a pure translational motion. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. The first fundamental robot joint is the. Prismatic Joint Rotation.
From www.chegg.com
Solved L Prismatic Joint Revolute Joint In your Prismatic Joint Rotation Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. A prismatic joint is a connection between two objects that allows relative motion along a single axis. For prismatic joints, the one dof is a translation along the axis relative to its. Motion that’s perpendicular to this axis (or rotation about any axis) is. The first. Prismatic Joint Rotation.
From www.researchgate.net
Symbol of revolute (rotary) and prismatic joints. Download Scientific Prismatic Joint Rotation Consider the robot arm below, for example: Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. This is a joint that corresponds to a pure translational motion. A prismatic joint is a connection between two objects that allows relative motion along a single axis. These actuators are movable parts and cause. Prismatic Joint Rotation.
From www.chegg.com
Solved (a) What is the difference between a prismatic joint Prismatic Joint Rotation These actuators are movable parts and cause relative motion between the two links it connects. This is a joint that corresponds to a pure translational motion. The first is a prismatic joint where the pair of links makes a translational displacement along a fixed axis. For revolute joints, the one dof is a joint angle defining the offset from a. Prismatic Joint Rotation.
From www.wikiwand.com
Prismatic joint Wikiwand Prismatic Joint Rotation Two types of joints, prismatic and revolute joints, constitute robot mechanisms in most cases. This is a joint that corresponds to a pure translational motion. The first fundamental robot joint is the prismatic joint. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. For revolute joints, the one dof is a. Prismatic Joint Rotation.
From www.researchgate.net
Prismatic joint biped robot. Download Scientific Diagram Prismatic Joint Rotation Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. Motion that’s perpendicular to this axis (or rotation about any axis) is. This is a joint that corresponds to a pure translational motion. In other words, one link slides on the other. The first is a prismatic joint where the pair of. Prismatic Joint Rotation.
From www.researchgate.net
Diagram of prismatic joint. Download Scientific Diagram Prismatic Joint Rotation This is a joint that corresponds to a pure translational motion. These actuators are movable parts and cause relative motion between the two links it connects. For revolute joints, the one dof is a joint angle defining the offset from a joint's zero position along its axis of rotation. Two types of joints, prismatic and revolute joints, constitute robot mechanisms. Prismatic Joint Rotation.