Velocity Acceleration Jerk Jounce . First level of control is to make acceleration continuous instead of a step function. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. So now you have constant jerk. Less well known is that the third. The coordinate representation of the velocity of our. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). But the drink in your cup will still splosh around and to reduce that you need to. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First order is often called tangency/velocity, second order is. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Specific derivatives have specific names. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a.
from mathsathome.com
With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. The coordinate representation of the velocity of our. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). First level of control is to make acceleration continuous instead of a step function. So now you have constant jerk. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. First order is often called tangency/velocity, second order is. But the drink in your cup will still splosh around and to reduce that you need to. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t).
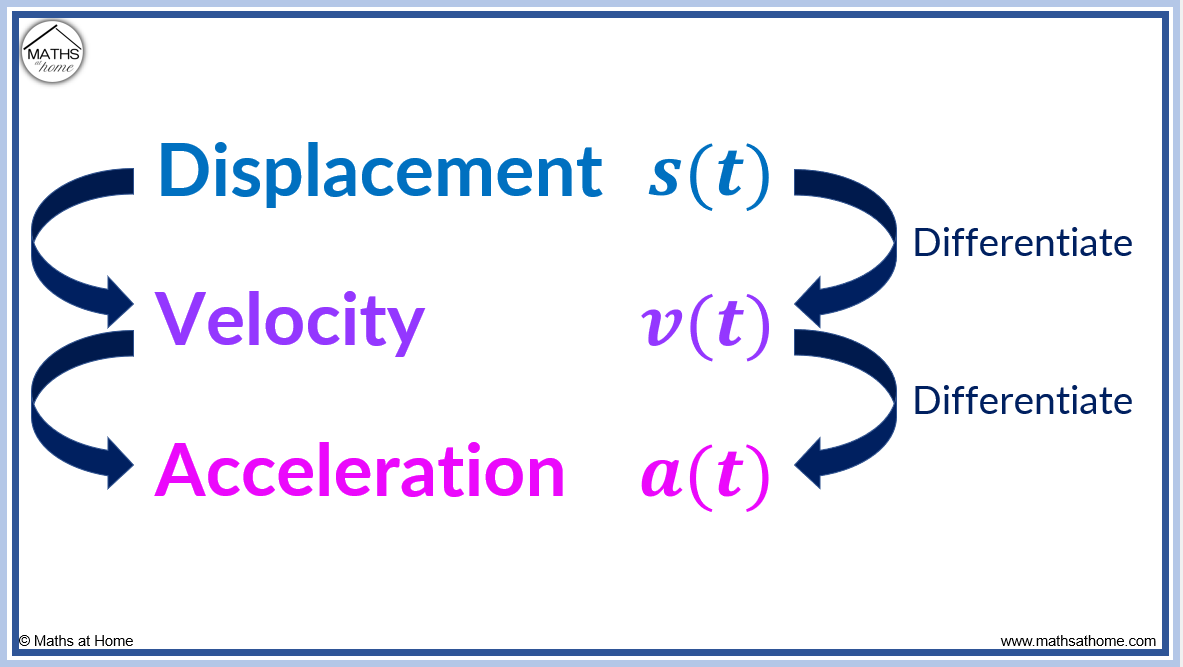
How to Find Displacement, Velocity and Acceleration
Velocity Acceleration Jerk Jounce Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. So now you have constant jerk. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Specific derivatives have specific names. First level of control is to make acceleration continuous instead of a step function. Less well known is that the third. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. The coordinate representation of the velocity of our. First order is often called tangency/velocity, second order is. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. But the drink in your cup will still splosh around and to reduce that you need to.
From www.reddit.com
I finally found out about the history of snap crackle pop Velocity Acceleration Jerk Jounce The coordinate representation of the velocity of our. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Less well known is that the third. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). So now you have constant jerk. (2b) (2b) y ′ (t) = d ϕ (x) x ′. Velocity Acceleration Jerk Jounce.
From www.reddit.com
Displacement, velocity, acceleration, jerk, jounce, flounce, pounce r Velocity Acceleration Jerk Jounce Less well known is that the third. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. First level of control is to make acceleration continuous instead of a step function. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Specific. Velocity Acceleration Jerk Jounce.
From slideplayer.com
II. Describing Motion Motion Speed & Velocity Acceleration ppt download Velocity Acceleration Jerk Jounce (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. Less well known is that the third. The first derivative of displacement x with respect to time. Velocity Acceleration Jerk Jounce.
From physicsposters.com
Derivatives of Position Jerk Sticker Physics Posters Velocity Acceleration Jerk Jounce So now you have constant jerk. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. But the drink in your cup will still splosh around and to reduce that you need to. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). Specific derivatives have specific names. Jounce (also known as snap) is. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Position, Velocity, Acceleration & Jerk YouTube Velocity Acceleration Jerk Jounce (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. But the drink in your cup will still splosh around and to reduce that you need to.. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Higher Order Derivatives of Acceleration What is Jerk, Snap (Jounce Velocity Acceleration Jerk Jounce First level of control is to make acceleration continuous instead of a step function. First order is often called tangency/velocity, second order is. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. But the drink in your cup will still splosh around and to reduce that you need to. Jounce (also. Velocity Acceleration Jerk Jounce.
From www.researchgate.net
Mean velocity spread over jerkan acceleration limitations Velocity Acceleration Jerk Jounce Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. So now you have constant jerk. First order is often called tangency/velocity, second order is. With good. Velocity Acceleration Jerk Jounce.
From www.researchgate.net
(PDF) Beyond velocity and acceleration Jerk, snap and higher derivatives Velocity Acceleration Jerk Jounce Specific derivatives have specific names. The coordinate representation of the velocity of our. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Less well known is that the third. But the drink in your cup will still splosh around and to reduce that you need to. (2b) (2b) y. Velocity Acceleration Jerk Jounce.
From www.mdpi.com
Robotics Free FullText On Fast JerkContinuous Motion Functions Velocity Acceleration Jerk Jounce (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). So now you have constant jerk. The coordinate representation of the velocity of our. But the drink in your cup will still splosh around and to reduce that you need to. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First order is often called tangency/velocity, second order is.. Velocity Acceleration Jerk Jounce.
From encyclopedia.pub
Jerk Encyclopedia MDPI Velocity Acceleration Jerk Jounce (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Less well known is that the third. So now you have constant jerk. First level of control is to make acceleration continuous instead of a step function. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. First order is. Velocity Acceleration Jerk Jounce.
From slideplayer.com
Speed, velocity and acceleration ppt download Velocity Acceleration Jerk Jounce Specific derivatives have specific names. Less well known is that the third. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). So now you have constant jerk. The coordinate representation of the velocity of our. (2b) (2b) y ′ (t) = d ϕ. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Math 1A HW 2.7.44 The figure shows the position, velocity, acceleration Velocity Acceleration Jerk Jounce By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). The coordinate representation of the velocity of our. Specific derivatives have specific names. So now you have constant jerk. But the drink in your cup will still splosh around and to reduce that you need to. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). The first derivative of. Velocity Acceleration Jerk Jounce.
From exoqtefpf.blob.core.windows.net
What Is Acceleration Jerk at Jeffery Popp blog Velocity Acceleration Jerk Jounce First level of control is to make acceleration continuous instead of a step function. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. But the drink in your cup will still splosh around and to reduce that you need to. With good physics design engineers are. Velocity Acceleration Jerk Jounce.
From www.pinterest.com
Velocity (v) = change position (r) Acceleration (a) = change in Velocity Acceleration Jerk Jounce The coordinate representation of the velocity of our. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). With good physics design engineers are attempting to produce. Velocity Acceleration Jerk Jounce.
From www.slideserve.com
PPT Velocity, Acceleration, Jerk PowerPoint Presentation, free Velocity Acceleration Jerk Jounce The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. Less well known is that the third. With good physics design engineers are attempting to produce a. Velocity Acceleration Jerk Jounce.
From www.researchgate.net
velocity, acceleration, and jerk of 3d trajectory of Figure 13 nURbs Velocity Acceleration Jerk Jounce The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. First order is often called tangency/velocity, second order is. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). The coordinate representation of the velocity of our. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First level of. Velocity Acceleration Jerk Jounce.
From handwiki.org
PhysicsAbsement HandWiki Velocity Acceleration Jerk Jounce So now you have constant jerk. Less well known is that the third. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). The coordinate representation of the velocity of our. Specific derivatives have specific names. First order is often called tangency/velocity, second order is. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives. Velocity Acceleration Jerk Jounce.
From www.researchgate.net
Motion Profiles. Position, velocity, acceleration and jerk profile Velocity Acceleration Jerk Jounce So now you have constant jerk. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). The coordinate representation of the velocity of our. But the drink in your cup will still splosh around and to reduce that you need to. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). With good physics design engineers are attempting to produce. Velocity Acceleration Jerk Jounce.
From mathsathome.com
How to Find Displacement, Velocity and Acceleration Velocity Acceleration Jerk Jounce Less well known is that the third. But the drink in your cup will still splosh around and to reduce that you need to. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). First level of control is to make acceleration continuous instead of a step function. Jounce (also known as snap) is the fourth derivative of. Velocity Acceleration Jerk Jounce.
From www.slideserve.com
PPT Velocity, Acceleration, Jerk PowerPoint Presentation, free Velocity Acceleration Jerk Jounce First level of control is to make acceleration continuous instead of a step function. The coordinate representation of the velocity of our. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). Less well known is that the third.. Velocity Acceleration Jerk Jounce.
From www.chegg.com
Solved The graphs of the position, velocity, acceleration, Velocity Acceleration Jerk Jounce But the drink in your cup will still splosh around and to reduce that you need to. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First level of control is to make acceleration continuous instead of a step function. The coordinate representation of the velocity of our. The. Velocity Acceleration Jerk Jounce.
From mathsathome.com
How to Find Displacement, Velocity and Acceleration Velocity Acceleration Jerk Jounce The coordinate representation of the velocity of our. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Specific derivatives have specific names. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First level of control is to make acceleration continuous instead of a step function. So now you have constant jerk. But the drink in your cup will. Velocity Acceleration Jerk Jounce.
From www.researchgate.net
Comparison of the configuration, velocity, acceleration, jerk, snap of Velocity Acceleration Jerk Jounce Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). The coordinate representation of the velocity of our. So now you have constant jerk. Specific derivatives have specific names. With good physics design engineers are. Velocity Acceleration Jerk Jounce.
From agilescientific.com
Jounce, Crackle and Pop — Agile Velocity Acceleration Jerk Jounce First level of control is to make acceleration continuous instead of a step function. Less well known is that the third. The coordinate representation of the velocity of our. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. (2b) (2b) y ′ (t) = d ϕ (x) x ′. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Position/Velocity/Acceleration Part 1 Definitions YouTube Velocity Acceleration Jerk Jounce Less well known is that the third. So now you have constant jerk. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. First order is often called tangency/velocity, second order is. But the drink in your cup will still splosh around and to reduce that you. Velocity Acceleration Jerk Jounce.
From slideplayer.com
Motion…Speed… Velocity…Acceleration ppt download Velocity Acceleration Jerk Jounce Specific derivatives have specific names. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. First level of control is to make acceleration continuous instead of a step function. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). So now you. Velocity Acceleration Jerk Jounce.
From ar.inspiredpencil.com
Position Velocity Acceleration Graphs Physics Velocity Acceleration Jerk Jounce By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). Specific derivatives have specific names. First level of control is to make acceleration continuous instead of a step function. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). So now you. Velocity Acceleration Jerk Jounce.
From slideplayer.com
Benchmark Lesson 1 Position, Velocity, Acceleration ppt download Velocity Acceleration Jerk Jounce So now you have constant jerk. With good physics design engineers are attempting to produce a gradual jerk and constant snap, which gives a. First level of control is to make acceleration continuous instead of a step function. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). But the drink in your cup will still splosh around. Velocity Acceleration Jerk Jounce.
From www.youtube.com
APLLICATION OF DERIVATIVE VELOCITY,ACCELERATION & JERK YouTube Velocity Acceleration Jerk Jounce The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). The coordinate representation of the velocity of our. By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). First order is often called tangency/velocity, second order is. Less well known. Velocity Acceleration Jerk Jounce.
From www.slideserve.com
PPT Velocity, Acceleration, Jerk PowerPoint Presentation, free Velocity Acceleration Jerk Jounce The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. Less well known is that. Velocity Acceleration Jerk Jounce.
From www.chegg.com
Solved I know jerk is the third derivative, and I think that Chegg Velocity Acceleration Jerk Jounce Specific derivatives have specific names. (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). So now you have constant jerk. Less well known is that the third. But the drink in your cup will still splosh around and to reduce that you need to. Jounce (also known as snap) is the fourth derivative of the position vector. Velocity Acceleration Jerk Jounce.
From www.tes.com
GCSEVelocity and acceleration Teaching Resources Velocity Acceleration Jerk Jounce But the drink in your cup will still splosh around and to reduce that you need to. First order is often called tangency/velocity, second order is. Less well known is that the third. The coordinate representation of the velocity of our. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Advanced Higher Physics Quanta Graphs of Displacement, Velocity Velocity Acceleration Jerk Jounce The coordinate representation of the velocity of our. The first derivative of displacement x with respect to time is velocity v, and the second derivative is acceleration a. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. First order is often called tangency/velocity, second order is.. Velocity Acceleration Jerk Jounce.
From www.youtube.com
Instantaneous Velocity, Acceleration, Jerk, Slopes, Graphs vs. Time Velocity Acceleration Jerk Jounce So now you have constant jerk. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. Specific derivatives have specific names. The coordinate representation of the velocity of our. But the drink in your cup will still splosh around and to reduce that you need to. By. Velocity Acceleration Jerk Jounce.
From www.slideserve.com
PPT Velocity, Acceleration, Jerk PowerPoint Presentation, free Velocity Acceleration Jerk Jounce By the (multivariable) chain rule, y′(t) = dϕ(x)x′(t). (2b) (2b) y ′ (t) = d ϕ (x) x ′ (t). Specific derivatives have specific names. Jounce (also known as snap) is the fourth derivative of the position vector with respect to time, with the first, second, and third. But the drink in your cup will still splosh around and to. Velocity Acceleration Jerk Jounce.