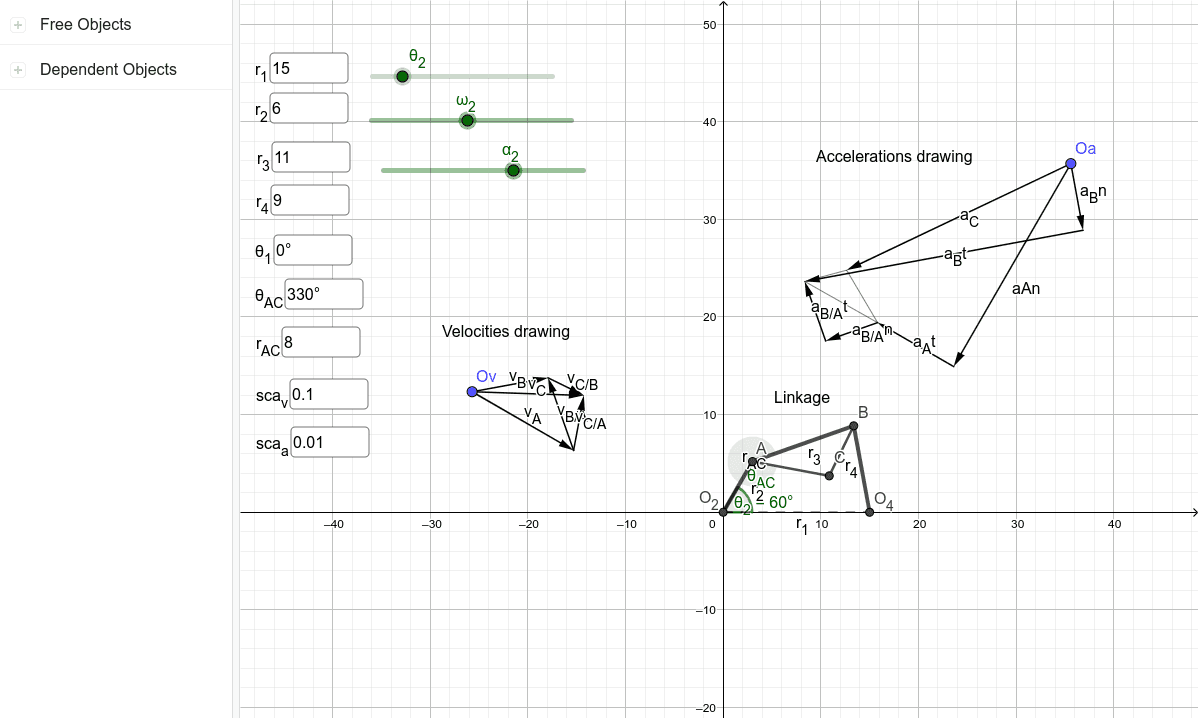
Four Bar Linkage Equations . Reciprocating motion with a total angle less. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Machine dynamics 4 bar linkage. One of the most common mechanisms: #1 (ground), and three moving bars #2, #3, and #4. O 2 and o 4. These notes have been revised to represent rotation matrices using boldfaced letters. Rotating motion through a complete circle. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Z1 + z2 = z4 + z3. The velocity loop equations are obtained by computing the time.
from www.geogebra.org
Z1 + z2 = z4 + z3. Reciprocating motion with a total angle less. O 2 and o 4. Rotating motion through a complete circle. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. One of the most common mechanisms: This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. The velocity loop equations are obtained by computing the time. #1 (ground), and three moving bars #2, #3, and #4. These notes have been revised to represent rotation matrices using boldfaced letters.
Fourbar linkage kinematics GeoGebra
Four Bar Linkage Equations #1 (ground), and three moving bars #2, #3, and #4. Reciprocating motion with a total angle less. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have been revised to represent rotation matrices using boldfaced letters. O 2 and o 4. Z1 + z2 = z4 + z3. Rotating motion through a complete circle. One of the most common mechanisms: Machine dynamics 4 bar linkage. The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. #1 (ground), and three moving bars #2, #3, and #4.
From www.youtube.com
Four Bar Linkage Grashof's Criterion Examples Of Four Bar Mechanism Four Bar Linkage Equations The velocity loop equations are obtained by computing the time. Machine dynamics 4 bar linkage. These notes have been revised to represent rotation matrices using boldfaced letters. One of the most common mechanisms: Z1 + z2 = z4 + z3. Rotating motion through a complete circle. A four bar linkage is a mechanical linkage that consists of four rigid bars. Four Bar Linkage Equations.
From www.chegg.com
A mechanism known as a fourbar linkage is shown in Four Bar Linkage Equations A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. One of the most common mechanisms: Z1 + z2 = z4 + z3. Rotating motion through a complete circle. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of. Four Bar Linkage Equations.
From www.vrogue.co
4 Bar Linkage Kinematics vrogue.co Four Bar Linkage Equations One of the most common mechanisms: The velocity loop equations are obtained by computing the time. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Z1 + z2 = z4 + z3. O 2 and o 4. Machine dynamics 4 bar linkage. Reciprocating motion with a total angle less.. Four Bar Linkage Equations.
From www.researchgate.net
Dimensions of a fourbar linkage Download Scientific Diagram Four Bar Linkage Equations A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. These notes have been revised to represent rotation matrices using boldfaced letters. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Reciprocating motion with. Four Bar Linkage Equations.
From www.vrogue.co
Solved The Four Bar Linkage Shown In Figure 2 Has The vrogue.co Four Bar Linkage Equations The velocity loop equations are obtained by computing the time. Reciprocating motion with a total angle less. One of the most common mechanisms: O 2 and o 4. These notes have been revised to represent rotation matrices using boldfaced letters. Z1 + z2 = z4 + z3. A four bar linkage is a mechanical linkage that consists of four rigid. Four Bar Linkage Equations.
From www.slideserve.com
PPT Dynamics of a fourbar linkage PowerPoint Presentation, free Four Bar Linkage Equations Z1 + z2 = z4 + z3. Reciprocating motion with a total angle less. These notes have been revised to represent rotation matrices using boldfaced letters. Machine dynamics 4 bar linkage. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Rotating motion through a. Four Bar Linkage Equations.
From www.geogebra.org
Fourbar linkage kinematics GeoGebra Four Bar Linkage Equations This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have been revised to represent rotation matrices using boldfaced letters. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. One of the. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar Linkage Four bar mechanism Four Bar Linkage Equations O 2 and o 4. The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Machine dynamics 4 bar linkage. Rotating motion through a complete circle. #1 (ground), and three moving bars #2, #3, and. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar Linkage Four bar mechanism Four Bar Linkage Equations O 2 and o 4. One of the most common mechanisms: Z1 + z2 = z4 + z3. Reciprocating motion with a total angle less. The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop.. Four Bar Linkage Equations.
From www.researchgate.net
A vector representation of fourbar linkage mechanism. Where the red Four Bar Linkage Equations #1 (ground), and three moving bars #2, #3, and #4. These notes have been revised to represent rotation matrices using boldfaced letters. Machine dynamics 4 bar linkage. Rotating motion through a complete circle. Z1 + z2 = z4 + z3. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints. Four Bar Linkage Equations.
From www.chegg.com
Solved For the four bar linkage mechanism shown, determine Four Bar Linkage Equations Rotating motion through a complete circle. #1 (ground), and three moving bars #2, #3, and #4. O 2 and o 4. Machine dynamics 4 bar linkage. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. A four bar linkage is a mechanical linkage that consists of four rigid bars. Four Bar Linkage Equations.
From www.chegg.com
Solved Consider the fourbar linkage illustrated as follows Four Bar Linkage Equations O 2 and o 4. Reciprocating motion with a total angle less. Rotating motion through a complete circle. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size. Four Bar Linkage Equations.
From www.youtube.com
Freudenstein's Equation for Four bar Mechanism Derivation (Function Four Bar Linkage Equations Reciprocating motion with a total angle less. Rotating motion through a complete circle. One of the most common mechanisms: Machine dynamics 4 bar linkage. #1 (ground), and three moving bars #2, #3, and #4. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. The velocity loop equations are obtained. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar mechanism Four bar linkage Four Bar Linkage Equations O 2 and o 4. These notes have been revised to represent rotation matrices using boldfaced letters. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a. Four Bar Linkage Equations.
From www.chegg.com
Solved For the four bar mechanism schematically shown, the Four Bar Linkage Equations A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Machine dynamics 4 bar linkage. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have been revised to represent rotation matrices using. Four Bar Linkage Equations.
From www.chegg.com
Solved For a general fourbar linkage shown in the figure Four Bar Linkage Equations Reciprocating motion with a total angle less. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar linkage Four bar mechanism Four Bar Linkage Equations These notes have been revised to represent rotation matrices using boldfaced letters. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. The velocity loop. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar linkage Four bar mechanism Four Bar Linkage Equations A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Z1 + z2 = z4 + z3. Machine dynamics 4 bar linkage. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have. Four Bar Linkage Equations.
From www.chegg.com
Solved Fourbar linkage mechanism For your project, you will Four Bar Linkage Equations These notes have been revised to represent rotation matrices using boldfaced letters. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. The velocity loop equations are obtained by computing the time. One of the most common mechanisms: Reciprocating motion with a total angle less. A four bar linkage is. Four Bar Linkage Equations.
From www.researchgate.net
Planar fourbar linkage. Download Scientific Diagram Four Bar Linkage Equations Reciprocating motion with a total angle less. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. #1 (ground), and three moving bars #2, #3, and #4. Machine dynamics 4 bar linkage. Z1 + z2 = z4 + z3. One of the most common mechanisms:. Four Bar Linkage Equations.
From www.researchgate.net
Fourbar linkage for kinematic performance verification. Download Four Bar Linkage Equations Z1 + z2 = z4 + z3. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. O 2 and o 4. Rotating motion through a complete circle. One of the most common mechanisms: #1 (ground), and three moving bars #2, #3, and #4. This. Four Bar Linkage Equations.
From www.school-mechademic.com
Static Force analysis on a 4 bar link mechanism Four Bar Linkage Equations These notes have been revised to represent rotation matrices using boldfaced letters. One of the most common mechanisms: #1 (ground), and three moving bars #2, #3, and #4. The velocity loop equations are obtained by computing the time. Z1 + z2 = z4 + z3. O 2 and o 4. A four bar linkage is a mechanical linkage that consists. Four Bar Linkage Equations.
From www.researchgate.net
Spring balancing parallelogram fourbar linkages Equation (31) shows Four Bar Linkage Equations This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Machine dynamics 4 bar linkage. Z1 + z2 = z4 + z3. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. One of the. Four Bar Linkage Equations.
From www.chegg.com
Solved 4bar linkage velocity analysis A12.1 The mechanism Four Bar Linkage Equations Machine dynamics 4 bar linkage. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Z1 + z2 = z4 + z3. O 2 and o 4. The velocity loop equations are obtained by computing the time. Rotating motion through a complete circle. One of the most common mechanisms: These. Four Bar Linkage Equations.
From www.youtube.com
Grashof's law for FourBar Linkages. Apply Crank Rocker, Double Rocker Four Bar Linkage Equations Reciprocating motion with a total angle less. O 2 and o 4. Z1 + z2 = z4 + z3. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. These notes have been revised to represent rotation matrices using boldfaced letters. This applet allows for. Four Bar Linkage Equations.
From www.vrogue.co
Four Bar Linkage Analysis And Synthesis vrogue.co Four Bar Linkage Equations This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Rotating motion through a complete circle. Machine dynamics 4 bar linkage. One of the most common mechanisms: O 2 and o 4. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by. Four Bar Linkage Equations.
From www.chegg.com
Solved The diagram in Figure 2 shows a 4bar linkage Four Bar Linkage Equations This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. O 2 and o 4. Z1 + z2 = z4 + z3. Machine dynamics 4 bar linkage. The velocity loop equations are obtained by computing the time. Rotating motion through a complete circle. These notes have been revised to represent. Four Bar Linkage Equations.
From www.chegg.com
Solved Write the acceleration equation for the 4 bar linkage Four Bar Linkage Equations O 2 and o 4. Reciprocating motion with a total angle less. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Machine dynamics 4 bar linkage. Rotating motion through a complete circle. One of the most common mechanisms: A four bar linkage is a mechanical linkage that consists of. Four Bar Linkage Equations.
From www.researchgate.net
AN EQUILATERAL FOUR BAR LINKAGE. Download Scientific Diagram Four Bar Linkage Equations This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. Machine dynamics 4 bar linkage. #1 (ground), and three moving bars #2, #3, and #4. Z1 + z2 = z4 + z3. The velocity loop equations are obtained by computing the time. One of the most common mechanisms: These notes. Four Bar Linkage Equations.
From www.chegg.com
Solved 1. (75 points) For a fourbar linkage with r =10 in, Four Bar Linkage Equations These notes have been revised to represent rotation matrices using boldfaced letters. #1 (ground), and three moving bars #2, #3, and #4. One of the most common mechanisms: Rotating motion through a complete circle. Reciprocating motion with a total angle less. O 2 and o 4. Machine dynamics 4 bar linkage. This applet allows for full manipulation of a 4. Four Bar Linkage Equations.
From www.kinematics-mechanisms.com
Kinematics Mechanisms Four bar Linkage Four bar mechanism Four Bar Linkage Equations Reciprocating motion with a total angle less. Rotating motion through a complete circle. Machine dynamics 4 bar linkage. #1 (ground), and three moving bars #2, #3, and #4. These notes have been revised to represent rotation matrices using boldfaced letters. The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists. Four Bar Linkage Equations.
From www.youtube.com
118 Vector loop equation of the four bar linkage YouTube Four Bar Linkage Equations #1 (ground), and three moving bars #2, #3, and #4. The velocity loop equations are obtained by computing the time. Machine dynamics 4 bar linkage. O 2 and o 4. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have been revised to represent rotation matrices using. Four Bar Linkage Equations.
From cdnsciencepub.com
Towards the appropriate synthesis of the fourbar linkage Four Bar Linkage Equations #1 (ground), and three moving bars #2, #3, and #4. Reciprocating motion with a total angle less. The velocity loop equations are obtained by computing the time. One of the most common mechanisms: A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. Z1 +. Four Bar Linkage Equations.
From www.youtube.com
Mechanism Design Static Force analysis of Four Bar link YouTube Four Bar Linkage Equations O 2 and o 4. #1 (ground), and three moving bars #2, #3, and #4. This applet allows for full manipulation of a 4 bar linkage with a desired proportion of size links for analysis. These notes have been revised to represent rotation matrices using boldfaced letters. Z1 + z2 = z4 + z3. Reciprocating motion with a total angle. Four Bar Linkage Equations.
From www.chegg.com
Solved Figure shows a fourbar linkage mechanism for Four Bar Linkage Equations The velocity loop equations are obtained by computing the time. A four bar linkage is a mechanical linkage that consists of four rigid bars or links connected by four joints to form a closed loop. These notes have been revised to represent rotation matrices using boldfaced letters. Reciprocating motion with a total angle less. This applet allows for full manipulation. Four Bar Linkage Equations.