Ignition-Gazebo-Diff-Drive-System . Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Through ignition rendering, it's possible to use rendering. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Differential drive robot example using ros2 and ignition gazebo.
from www.mech4study.com
I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Differential drive robot example using ros2 and ignition gazebo. Through ignition rendering, it's possible to use rendering. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i came across this. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots.
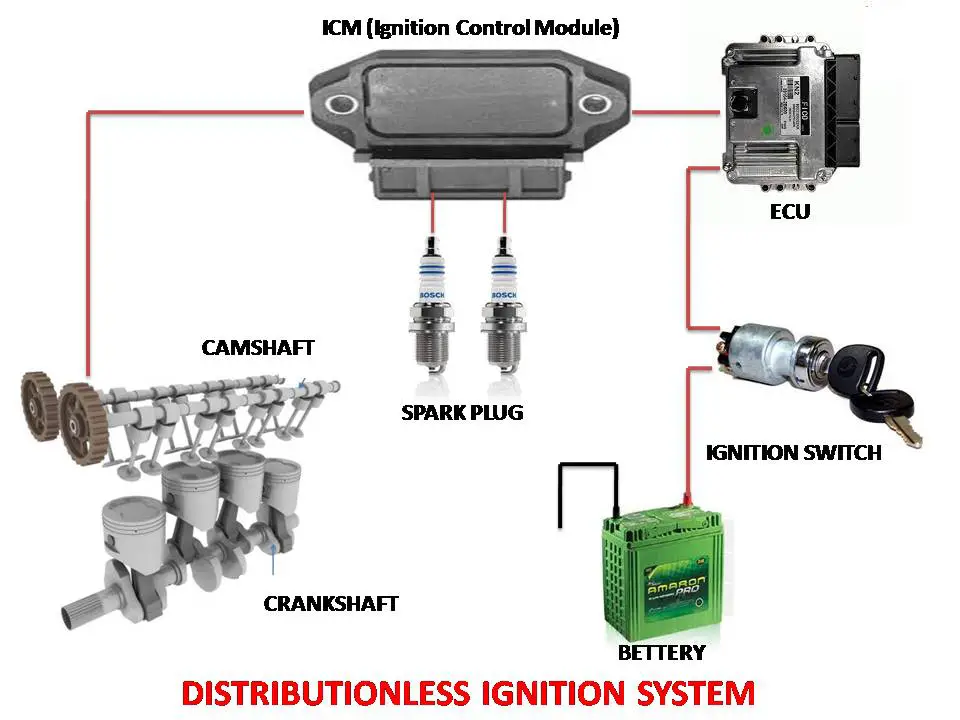
How a Distributorless Ignition System Works? Mech4study
Ignition-Gazebo-Diff-Drive-System Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. So i came across this. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Through ignition rendering, it's possible to use rendering.
From www.youtube.com
ROS2 Wheeled Mobile Robot Gazebo Simulation ROS2 Control Diff Drive Ignition-Gazebo-Diff-Drive-System So i came across this. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Through ignition rendering, it's possible to use rendering. Differential drive controller which can be attached to a model with any number of left and right wheels. Plugin. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Differential drive mobile robot ROS2 Humble / Ignition Gazebo Ignition-Gazebo-Diff-Drive-System Differential drive controller which can be attached to a model with any number of left and right wheels. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a. Ignition-Gazebo-Diff-Drive-System.
From carfromjapan.com
The 4 Types Of Ignition System And How They Work Ignition-Gazebo-Diff-Drive-System I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive robot example using ros2 and ignition gazebo. So i came across this. Through ignition rendering, it's possible to use. Ignition-Gazebo-Diff-Drive-System.
From github.com
gazebosimulator · GitHub Topics · GitHub Ignition-Gazebo-Diff-Drive-System In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i came across this. Differential drive robot example using ros2 and ignition gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels.. Ignition-Gazebo-Diff-Drive-System.
From cyaninfinite.com
Cyan Infinite Getting started with Ignition Gazebo Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. I'm trying to control an imported. Ignition-Gazebo-Diff-Drive-System.
From toolsweek.com
How to Wire An Ignition Coil Diagram (Types & Wiring Guides) Ignition-Gazebo-Diff-Drive-System Through ignition rendering, it's possible to use rendering. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive robot example using ros2 and ignition gazebo. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. So i came across this. Differential drive controller which can be attached to. Ignition-Gazebo-Diff-Drive-System.
From whatibroke.com
Gazebo Classic to Gazebo Ignition Diff Drive Conversion What I Broke Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive controller which can be attached to a model with any number of left and right wheels. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Differential drive robot. Ignition-Gazebo-Diff-Drive-System.
From github.com
ignitiongazebo · GitHub Topics · GitHub Ignition-Gazebo-Diff-Drive-System I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. So i came across this. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. In this tutorial,. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Differential Drive ROS Gazebo Ignition YouTube Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive robot example using ros2 and ignition gazebo. Through ignition rendering, it's possible to use rendering. So i came across this. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive controller which can be attached to. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Differential drive robot simulation using an ignition gazebo YouTube Ignition-Gazebo-Diff-Drive-System I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive robot example using ros2 and ignition gazebo. Differential drive controller which can be attached to a model with any. Ignition-Gazebo-Diff-Drive-System.
From docs.ros.org
gazebo_plugins gazebo_ros_diff_drive.h File Reference Ignition-Gazebo-Diff-Drive-System So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. Differential drive robot example using ros2 and ignition gazebo. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Through ignition rendering, it's possible to use rendering. For example, the diff_drive plugin, provided by. Ignition-Gazebo-Diff-Drive-System.
From github.com
GitHub NaokiTakahashi12/simply_diff_drive_simulator Simulation of a Ignition-Gazebo-Diff-Drive-System Through ignition rendering, it's possible to use rendering. So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot. Ignition-Gazebo-Diff-Drive-System.
From it.mathworks.com
Control Differential Drive Robot in Gazebo with Simulink MATLAB Ignition-Gazebo-Diff-Drive-System Differential drive robot example using ros2 and ignition gazebo. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. So i came across this. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. In this tutorial, you launched a robot simulation with ignition gazebo,. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Ignition Gazebo for PX4 SoftwareInTheLoop Simulations Jaeyoung Lim Ignition-Gazebo-Diff-Drive-System Differential drive controller which can be attached to a model with any number of left and right wheels. Through ignition rendering, it's possible to use rendering. So i came across this. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Four wheel steering model with ROS2 controllers Ignition Gazebo first Ignition-Gazebo-Diff-Drive-System Differential drive robot example using ros2 and ignition gazebo. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and. Ignition-Gazebo-Diff-Drive-System.
From docs.ros.org
Setting up a robot simulation (Ignition Gazebo) — ROS 2 Documentation Ignition-Gazebo-Diff-Drive-System In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i came across this. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive controller which can be attached to a model. Ignition-Gazebo-Diff-Drive-System.
From www.onallcylinders.com
Guide to Automotive Ignition System Designs Ignition-Gazebo-Diff-Drive-System Differential drive robot example using ros2 and ignition gazebo. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Through ignition rendering, it's possible to use rendering. So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. In this tutorial, you launched a robot. Ignition-Gazebo-Diff-Drive-System.
From discuss.ardupilot.org
Ignition Gazebo + SITL support Development Team ArduPilot Discourse Ignition-Gazebo-Diff-Drive-System Differential drive controller which can be attached to a model with any number of left and right wheels. So i came across this. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot.. Ignition-Gazebo-Diff-Drive-System.
From carfromjapan.com
The 4 Types Of Ignition System And How They Work Ignition-Gazebo-Diff-Drive-System So i came across this. Through ignition rendering, it's possible to use rendering. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive robot example using ros2 and ignition gazebo. I'm trying to control an imported pioneer model. Ignition-Gazebo-Diff-Drive-System.
From discourse.ros.org
🔥 Ignition Gazebo + ROS 2 (August community meeting crosspost Ignition-Gazebo-Diff-Drive-System In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Differential drive robot example using ros2 and ignition gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels. I'm trying to control an. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Navigation2 simulation using an ignition gazebo YouTube Ignition-Gazebo-Diff-Drive-System Differential drive robot example using ros2 and ignition gazebo. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. For example, the diff_drive plugin, provided by ignition gazebo, implements. Ignition-Gazebo-Diff-Drive-System.
From gazebosim.org
Ignition Gazebo Levels Ignition-Gazebo-Diff-Drive-System Through ignition rendering, it's possible to use rendering. Differential drive controller which can be attached to a model with any number of left and right wheels. So i came across this. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by. Ignition-Gazebo-Diff-Drive-System.
From nullpo24.hatenablog.com
Ignition Citadelを試してみる【Ignition Gazebo】 ふるお〜と! FullAuto Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive controller which can be attached to a model with any number of left and right wheels. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and. Ignition-Gazebo-Diff-Drive-System.
From community.gazebosim.org
Community meeting Ignition vs Gazebo, and Ignition Rendering (July Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. Differential drive controller which can be attached to a model with any number of left and right wheels. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’. Ignition-Gazebo-Diff-Drive-System.
From docs.ros.org
gazebo_plugins gazebo_ros_diff_drive.cpp File Reference Ignition-Gazebo-Diff-Drive-System Differential drive controller which can be attached to a model with any number of left and right wheels. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Through ignition rendering, it's possible to use rendering. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep. Ignition-Gazebo-Diff-Drive-System.
From www.mathworks.com
Control Differential Drive Robot in Gazebo with Simulink MATLAB Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive. Ignition-Gazebo-Diff-Drive-System.
From www.youtube.com
Connecting ROS2 Differential Drive Controller to the Gazebo YouTube Ignition-Gazebo-Diff-Drive-System So i came across this. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Differential drive robot example using ros2 and ignition gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels.. Ignition-Gazebo-Diff-Drive-System.
From in.mathworks.com
Control Differential Drive Robot in Gazebo with Simulink MATLAB Ignition-Gazebo-Diff-Drive-System In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. So i came across this. I'm trying to control an imported pioneer model with the. Ignition-Gazebo-Diff-Drive-System.
From ros-mobile-robots.com
Simulation DiffBot Differential Drive Mobile Robot Ignition-Gazebo-Diff-Drive-System Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive controller which can be attached to a model with any number of left and right wheels. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by. Ignition-Gazebo-Diff-Drive-System.
From community.gazebosim.org
GSoC 2021 Machine Learning Extension to Ignition Gazebo General Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i came across this. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line. Ignition-Gazebo-Diff-Drive-System.
From index.ros.org
ROS Package ros_ign_gazebo_demos Ignition-Gazebo-Diff-Drive-System In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive controller which can be attached to a model with any number of left. Ignition-Gazebo-Diff-Drive-System.
From www.mech4study.com
How a Distributorless Ignition System Works? Mech4study Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive robot example using ros2 and ignition gazebo. So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. I'm trying to control an imported pioneer model with the old. Ignition-Gazebo-Diff-Drive-System.
From github.com
ignitiongazebo · GitHub Topics · GitHub Ignition-Gazebo-Diff-Drive-System Through ignition rendering, it's possible to use rendering. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. Differential drive robot example using ros2 and ignition gazebo. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. So i. Ignition-Gazebo-Diff-Drive-System.
From github.com
gazebo_ros2_control/diff_drive_controller.yaml at master · roscontrols Ignition-Gazebo-Diff-Drive-System Through ignition rendering, it's possible to use rendering. I'm trying to control an imported pioneer model with the old gazebo plugins changed for the ign plugins, but i keep getting. For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. Differential drive controller which can be attached to a model with any number. Ignition-Gazebo-Diff-Drive-System.
From gazebosim.org
Ignition Gazebo title Ignition-Gazebo-Diff-Drive-System For example, the diff_drive plugin, provided by ignition gazebo, implements a differential drive controller for mobile robots. So i came across this. Differential drive controller which can be attached to a model with any number of left and right wheels. Plugin name=‘diff_drive’ filename=‘libgazebo_ros_diff_drive.so’ this will never work since this line is for gazebo. In this tutorial, you launched a robot. Ignition-Gazebo-Diff-Drive-System.