Ignition Gazebo Joint State Publisher . Mastering gazebo simulator full course: Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. I need to transfer point cloud data to ros2. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. In this post, you will learn how to use the joint_state_publisher node. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Learn to debug your robot model joints using a graphical interface. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The plugin publishes the states of the joints of the parent model.
from gazebosim.org
I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. I need to transfer point cloud data to ros2. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Mastering gazebo simulator full course: The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Learn to debug your robot model joints using a graphical interface. The plugin publishes the states of the joints of the parent model. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. In this post, you will learn how to use the joint_state_publisher node. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller.
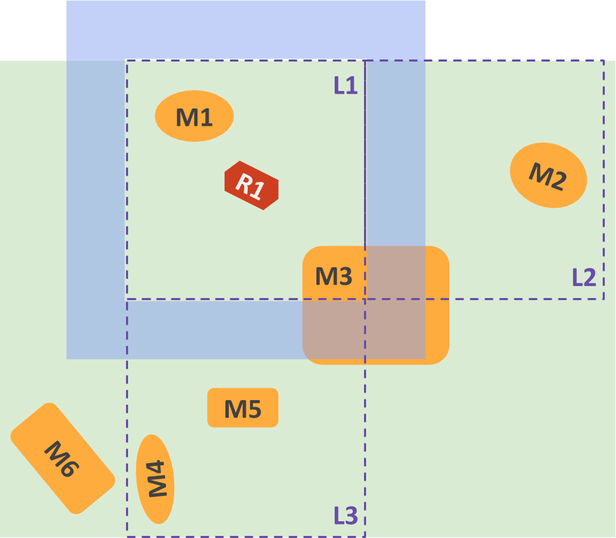
Ignition Gazebo Levels
Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. Learn to debug your robot model joints using a graphical interface. I need to transfer point cloud data to ros2. Mastering gazebo simulator full course: The plugin publishes the states of the joints of the parent model. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. In this post, you will learn how to use the joint_state_publisher node. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller.
From robotics.stackexchange.com
control Joint Controller plugin not creating topic in ignition gazebo Ignition Gazebo Joint State Publisher I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Learn to debug your robot model joints using a graphical interface. In. Ignition Gazebo Joint State Publisher.
From cyaninfinite.com
Cyan Infinite Getting started with Ignition Gazebo Ignition Gazebo Joint State Publisher Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. In this post, you will learn how to use the joint_state_publisher node. The plugin publishes the states of the joints of the parent. Ignition Gazebo Joint State Publisher.
From www.allisonthackston.com
Ignition vs Gazebo Allison Thackston Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. In this post, you will learn how to use the joint_state_publisher node. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Mastering gazebo simulator full course: The joint state publisher and pose publisher plugins create their topics. Ignition Gazebo Joint State Publisher.
From www.ncnynl.com
Ignition入门教程ROS2启动joint_states 创客智造 Ignition Gazebo Joint State Publisher The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. I need to transfer point cloud data to ros2. The plugin publishes the states of the joints of the parent model.. Ignition Gazebo Joint State Publisher.
From forum.dexterindustries.com
ROS, ROS2 Why joint_state_pub and robot_state_pub? GoPiGo Modular Ignition Gazebo Joint State Publisher Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. In this post, you will learn how to use the joint_state_publisher node. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I need to transfer point cloud data to. Ignition Gazebo Joint State Publisher.
From github.com
ignitiongazebo · GitHub Topics · GitHub Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. The plugin publishes the states of the joints of the parent model. Learn to debug your robot model joints using a graphical interface. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. In this post, you will learn how to use the joint_state_publisher. Ignition Gazebo Joint State Publisher.
From blog.csdn.net
运行没报错,但是joint_state_publisher控制插件不显示_rviz中的关节控制插件CSDN博客 Ignition Gazebo Joint State Publisher The plugin publishes the states of the joints of the parent model. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Learn to debug your robot model joints using a graphical interface.. Ignition Gazebo Joint State Publisher.
From www.theconstruct.ai
[Gazebo in 5 minutes] 011 How to use the joint_state_publisher The Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. The plugin publishes the states of the joints of the parent model. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Tested on ubuntu 18.04 lts + ros. Ignition Gazebo Joint State Publisher.
From docs.ros.org
gazebo_plugins gazebo_ros_joint_state_publisher.h File Reference Ignition Gazebo Joint State Publisher I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. I need to transfer point cloud data to ros2. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. The plugin publishes the states of. Ignition Gazebo Joint State Publisher.
From gazebosim.org
Ignition Gazebo Levels Ignition Gazebo Joint State Publisher Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. The plugin publishes the states of the joints of the parent model. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9.. Ignition Gazebo Joint State Publisher.
From index.ros.org
ROS Package ros_ign_gazebo_demos Ignition Gazebo Joint State Publisher Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. In this post, you will learn how to use the joint_state_publisher node. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does. Ignition Gazebo Joint State Publisher.
From www.theconstruct.ai
Gazebo Tutorials The Construct Ignition Gazebo Joint State Publisher The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I need to transfer point cloud data to ros2. In this post, you will learn how to use the joint_state_publisher node. The plugin publishes the states of the joints of the parent model. Mastering gazebo simulator full course: Learn to. Ignition Gazebo Joint State Publisher.
From www.allisonthackston.com
Ignition vs Gazebo Allison Thackston Ignition Gazebo Joint State Publisher Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The plugin publishes the. Ignition Gazebo Joint State Publisher.
From answers.gazebosim.org
visualizing point clouds in the ignition gazebo Gazebo Q&A Forum Ignition Gazebo Joint State Publisher Learn to debug your robot model joints using a graphical interface. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. I need to transfer point cloud data to ros2. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. The joint state publisher and pose publisher plugins create their topics and i can interface them with. Ignition Gazebo Joint State Publisher.
From www.allisonthackston.com
Ignition vs Gazebo Allison Thackston Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Mastering gazebo simulator full course: Learn to debug your robot model joints using a graphical interface. Joint states publisher. Ignition Gazebo Joint State Publisher.
From www.allisonthackston.com
Ignition vs Gazebo Allison Thackston Ignition Gazebo Joint State Publisher Mastering gazebo simulator full course: The plugin publishes the states of the joints of the parent model. In this post, you will learn how to use the joint_state_publisher node. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues.. Ignition Gazebo Joint State Publisher.
From docs.ros.org
gazebo_plugins gazebo_ros_joint_state_publisher.cpp File Reference Ignition Gazebo Joint State Publisher Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Learn to debug your robot model joints using a graphical interface. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Tested on ubuntu 18.04 lts + ros melodic +. Ignition Gazebo Joint State Publisher.
From community.gazebosim.org
GSoC 2021 Machine Learning Extension to Ignition Gazebo General Ignition Gazebo Joint State Publisher Learn to debug your robot model joints using a graphical interface. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Mastering gazebo simulator full course: Joint states publisher (ignition::gazebo::systems::jointstatepublisher). Ignition Gazebo Joint State Publisher.
From www.youtube.com
Lesson 002 (URDF + Gazebo) Part 3 Joint state publisher YouTube Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Tested on. Ignition Gazebo Joint State Publisher.
From github.com
GitHub yossioo/gazebo_ros_joints_publisher Gazebo ROS plugin Joint Ignition Gazebo Joint State Publisher The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Learn to debug your robot model joints using a graphical interface. Mastering gazebo simulator full course: Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Joint. Ignition Gazebo Joint State Publisher.
From www.youtube.com
Moving the arm using joint state publisher in Rviz YouTube Ignition Gazebo Joint State Publisher The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Mastering gazebo simulator full course: Learn to debug your robot model joints. Ignition Gazebo Joint State Publisher.
From community.gazebosim.org
Community meeting ROS 2 + Ignition Gazebo (August 2021) General Ignition Gazebo Joint State Publisher Learn to debug your robot model joints using a graphical interface. The plugin publishes the states of the joints of the parent model. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. Mastering gazebo simulator full course: I need to transfer point cloud data. Ignition Gazebo Joint State Publisher.
From community.gazebosim.org
Community meeting Ignition vs Gazebo, and Ignition Rendering (July Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. Mastering gazebo simulator full course: I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. The plugin publishes the states of the joints of the parent model. The joint state publisher and. Ignition Gazebo Joint State Publisher.
From www.allisonthackston.com
Ignition vs Gazebo Allison Thackston Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. Mastering gazebo simulator full course: Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The plugin publishes the states of the joints of the parent model. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition. Ignition Gazebo Joint State Publisher.
From github.com
gazebosimulator · GitHub Topics · GitHub Ignition Gazebo Joint State Publisher Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The plugin publishes the states of the joints of the parent model. In this post, you will learn how to use the joint_state_publisher node. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Learn to debug your robot model joints using a graphical interface. Gazebo provides three joint controller plugins. Ignition Gazebo Joint State Publisher.
From cyaninfinite.com
Cyan Infinite Getting started with Ignition Gazebo Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Mastering gazebo simulator full course: In this post, you will learn. Ignition Gazebo Joint State Publisher.
From www.theconstruct.ai
[Gazebo in 5 minutes] 011 How to use the joint_state_publisher The Ignition Gazebo Joint State Publisher I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. In this post, you will learn how to use the joint_state_publisher node. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without. Ignition Gazebo Joint State Publisher.
From blog.csdn.net
使用gazebo在ROS中仿真_gazebo 船上CSDN博客 Ignition Gazebo Joint State Publisher I need to transfer point cloud data to ros2. In this post, you will learn how to use the joint_state_publisher node. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress. Ignition Gazebo Joint State Publisher.
From www.youtube.com
ROS Robotics Joint Position Controller Gazebo Ignition YouTube Ignition Gazebo Joint State Publisher Learn to debug your robot model joints using a graphical interface. I need to transfer point cloud data to ros2. The plugin publishes the states of the joints of the parent model. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. Mastering gazebo simulator full course: Tested on ubuntu. Ignition Gazebo Joint State Publisher.
From community.gazebosim.org
Ignition ros control hardware interface (noetic + ignition edifice Ignition Gazebo Joint State Publisher I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. In this post, you will learn how to use the joint_state_publisher node. The plugin publishes the states of the joints of the parent model. I need to transfer point cloud data to ros2. Learn to debug your robot model joints using a graphical. Ignition Gazebo Joint State Publisher.
From community.gazebosim.org
Google Summer of Code 2021 New GUI Widgets in Ignition Gazebo Ignition Gazebo Joint State Publisher Learn to debug your robot model joints using a graphical interface. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. In this post, you will learn how to use the. Ignition Gazebo Joint State Publisher.
From github.com
GitHub artefact/navigation2_ignition_gazebo_example Minimal Ignition Gazebo Joint State Publisher Mastering gazebo simulator full course: Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. In this post, you will learn how to use the joint_state_publisher node.. Ignition Gazebo Joint State Publisher.
From blog.csdn.net
使用gazebo在ROS中仿真_gazebo 船上CSDN博客 Ignition Gazebo Joint State Publisher Gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and jointtrajectorycontroller. Mastering gazebo simulator full course: Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. In this post, you will learn how. Ignition Gazebo Joint State Publisher.
From github.com
GitHub Boeing/gazebo_set_joint_positions_plugin Gazebo 11 ROS Ignition Gazebo Joint State Publisher Tested on ubuntu 18.04 lts + ros melodic + gazebo 9.9. Learn to debug your robot model joints using a graphical interface. The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I've a virtual intel realsense d435 camera kept on a cube in a gazebo ignition fortress world. Joint. Ignition Gazebo Joint State Publisher.
From github.com
GitHub franklinselva/ros2_joint_state_publisher_plugin Gazebo plugin Ignition Gazebo Joint State Publisher Mastering gazebo simulator full course: The joint state publisher and pose publisher plugins create their topics and i can interface them with ros_ign_bridge without issues. I need to transfer point cloud data to ros2. In this post, you will learn how to use the joint_state_publisher node. Joint states publisher (ignition::gazebo::systems::jointstatepublisher) does not publish efforts. The plugin publishes the states of. Ignition Gazebo Joint State Publisher.