Go To Goal Turtlesim . 1.moving in a straight line. This tutorial teaches you how to move your turtle in order to learn python. Users learn how to quickly start with turtlebot simulators and it's control. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. In total, 3 goal positions have been provided. How can i give a new goal and restart go_to_goalpose function while function is working. In this link, it tells how to do. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. [udemy course] ros tutorial 4.4: This video demonstrates the go to goal behaviour of the turtle using proportional control.
from automaticaddison.com
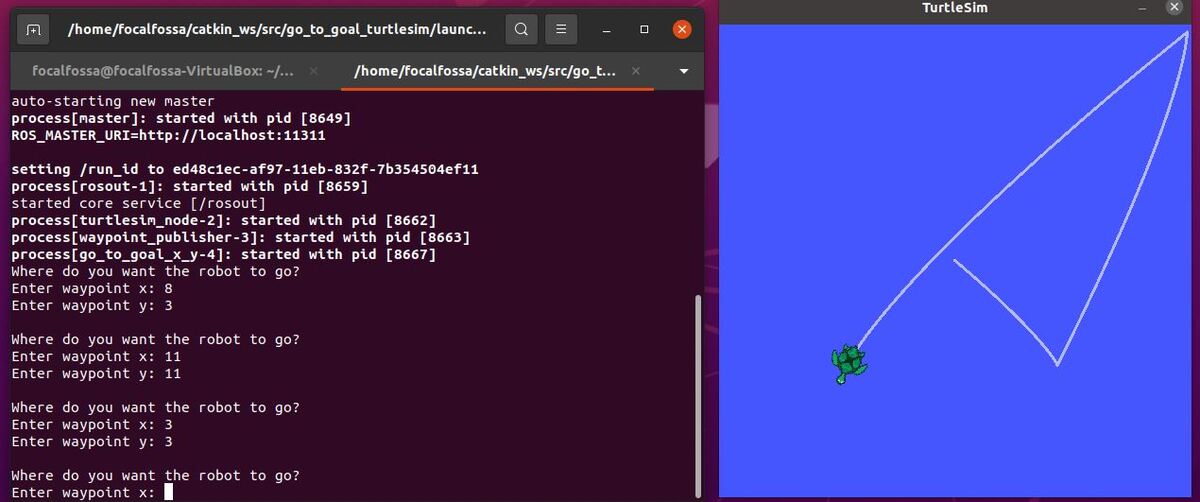
[udemy course] ros tutorial 4.4: This tutorial teaches you how to move your turtle in order to learn python. In total, 3 goal positions have been provided. How can i give a new goal and restart go_to_goalpose function while function is working. In this link, it tells how to do. 1.moving in a straight line. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. This video demonstrates the go to goal behaviour of the turtle using proportional control. Users learn how to quickly start with turtlebot simulators and it's control. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations.
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison
Go To Goal Turtlesim This video demonstrates the go to goal behaviour of the turtle using proportional control. This tutorial teaches you how to move your turtle in order to learn python. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In total, 3 goal positions have been provided. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. [udemy course] ros tutorial 4.4: In this link, it tells how to do. This video demonstrates the go to goal behaviour of the turtle using proportional control. Users learn how to quickly start with turtlebot simulators and it's control. 1.moving in a straight line. How can i give a new goal and restart go_to_goalpose function while function is working.
From www.vecteezy.com
the man stumble and can't go to the goal illustration vector. 6888216 Go To Goal Turtlesim 1.moving in a straight line. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. How can i give a new goal and restart go_to_goalpose function while function is working. [udemy course] ros tutorial 4.4: In this tutorial, we will build ros. Go To Goal Turtlesim.
From www.freepik.com
Premium Vector Person go to goal. Man walking to target. Success on Go To Goal Turtlesim In total, 3 goal positions have been provided. 1.moving in a straight line. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. [udemy course] ros tutorial 4.4: This tutorial teaches you how to move your turtle in order to learn python. Hi, recently, while i was learning on how to control turtle in. Go To Goal Turtlesim.
From www.youtube.com
Go to goal TurtleSim ROS2 YouTube Go To Goal Turtlesim How can i give a new goal and restart go_to_goalpose function while function is working. Users learn how to quickly start with turtlebot simulators and it's control. In total, 3 goal positions have been provided. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make. Go To Goal Turtlesim.
From answers.ros.org
Turtle_sim go_to_goal loop, keeps going in circle ROS Answers Open Go To Goal Turtlesim Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. 1.moving in a straight line. In total, 3 goal positions have been provided. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. Users learn how. Go To Goal Turtlesim.
From www.dreamstime.com
The Man Go To the Goal. Success and Business Concept Stock Vector Go To Goal Turtlesim [udemy course] ros tutorial 4.4: Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. This tutorial teaches you how to move your turtle in order to learn python. In total, 3 goal positions have been provided. How can i give a. Go To Goal Turtlesim.
From www.youtube.com
Moving turtlesim to goal using action YouTube Go To Goal Turtlesim In this link, it tells how to do. [udemy course] ros tutorial 4.4: In total, 3 goal positions have been provided. This video demonstrates the go to goal behaviour of the turtle using proportional control. How can i give a new goal and restart go_to_goalpose function while function is working. 1.moving in a straight line. Hi, recently, while i was. Go To Goal Turtlesim.
From automaticaddison.com
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison Go To Goal Turtlesim How can i give a new goal and restart go_to_goalpose function while function is working. Users learn how to quickly start with turtlebot simulators and it's control. In this link, it tells how to do. This tutorial teaches you how to move your turtle in order to learn python. Hi, recently, while i was learning on how to control turtle. Go To Goal Turtlesim.
From github.com
GitHub SimonLee9/go_to_goal mobile robot(diff_wheel) moving test Go To Goal Turtlesim In total, 3 goal positions have been provided. This tutorial teaches you how to move your turtle in order to learn python. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. Users learn how to quickly start with turtlebot simulators and it's control. This video demonstrates the go to goal behaviour of the. Go To Goal Turtlesim.
From automaticaddison.com
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison Go To Goal Turtlesim Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. How can i give a new goal and restart go_to_goalpose function while function is working. Users learn how to quickly start with turtlebot simulators and it's control. 1.moving in a straight line.. Go To Goal Turtlesim.
From www.youtube.com
Go For Goal YouTube Go To Goal Turtlesim In total, 3 goal positions have been provided. [udemy course] ros tutorial 4.4: Users learn how to quickly start with turtlebot simulators and it's control. This video demonstrates the go to goal behaviour of the turtle using proportional control. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki. Go To Goal Turtlesim.
From www.youtube.com
turtlebot example Go To Goal YouTube Go To Goal Turtlesim Users learn how to quickly start with turtlebot simulators and it's control. This video demonstrates the go to goal behaviour of the turtle using proportional control. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. 1.moving in a straight line. This tutorial teaches you how to move your turtle in order to learn. Go To Goal Turtlesim.
From www.freepik.com
Premium Vector Set goal and take action to achieve goal or target Go To Goal Turtlesim In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In total, 3 goal positions have been provided. 1.moving in a straight line. This video demonstrates. Go To Goal Turtlesim.
From www.dreamstime.com
Go for goal stock illustration. Illustration of competitive 18099474 Go To Goal Turtlesim This video demonstrates the go to goal behaviour of the turtle using proportional control. Users learn how to quickly start with turtlebot simulators and it's control. In this link, it tells how to do. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a. Go To Goal Turtlesim.
From automaticaddison.com
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison Go To Goal Turtlesim [udemy course] ros tutorial 4.4: How can i give a new goal and restart go_to_goalpose function while function is working. This video demonstrates the go to goal behaviour of the turtle using proportional control. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. In this link, it tells how to do. Users learn. Go To Goal Turtlesim.
From timer.mes.fm
Every Goal Starts With Go Inspirational Quotes Timer Go To Goal Turtlesim In total, 3 goal positions have been provided. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. How can i give a new goal and. Go To Goal Turtlesim.
From aditya-shirwatkar.github.io
PID on the Turtlesim package in ROS A2 Go To Goal Turtlesim Users learn how to quickly start with turtlebot simulators and it's control. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. How can i give a new goal and restart go_to_goalpose function while function is working. [udemy course] ros tutorial 4.4:. Go To Goal Turtlesim.
From www.bitesizelearning.co.uk
SMART goals the meaning of this goalsetting framework, with examples Go To Goal Turtlesim 1.moving in a straight line. [udemy course] ros tutorial 4.4: This tutorial teaches you how to move your turtle in order to learn python. Users learn how to quickly start with turtlebot simulators and it's control. This video demonstrates the go to goal behaviour of the turtle using proportional control. In total, 3 goal positions have been provided. Hi, recently,. Go To Goal Turtlesim.
From automaticaddison.com
Implementing the ROS Turtlesim Project With rospy Automatic Addison Go To Goal Turtlesim This tutorial teaches you how to move your turtle in order to learn python. [udemy course] ros tutorial 4.4: Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. Users learn how to quickly start with turtlebot simulators and it's control. This. Go To Goal Turtlesim.
From www.youtube.com
GO To goal Turtlesim YouTube Go To Goal Turtlesim In this link, it tells how to do. Users learn how to quickly start with turtlebot simulators and it's control. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In this tutorial, we will build ros nodes to move the turtlesim. Go To Goal Turtlesim.
From github.com
GitHub bhanumati29/TurtlesimROS Various behaviour such as goto Go To Goal Turtlesim This tutorial teaches you how to move your turtle in order to learn python. In this link, it tells how to do. 1.moving in a straight line. [udemy course] ros tutorial 4.4: How can i give a new goal and restart go_to_goalpose function while function is working. Hi, recently, while i was learning on how to control turtle in turtlesim. Go To Goal Turtlesim.
From marcommnews.com
Go for Goals! The UN SDG card game from Creature & Co. that puts Go To Goal Turtlesim In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. This video demonstrates the go to goal behaviour of the turtle using proportional control. 1.moving in a straight line. In total, 3 goal positions have been provided. How can i give a new goal and restart go_to_goalpose function while function is working. Hi, recently,. Go To Goal Turtlesim.
From www.youtube.com
4 ROS for Beginners How to move Turtlebot based on Go to Goal Go To Goal Turtlesim In total, 3 goal positions have been provided. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. How can i give a new goal and restart go_to_goalpose function while function is working. This video demonstrates the go to goal behaviour of the turtle using proportional control. This tutorial teaches you how to move. Go To Goal Turtlesim.
From www.vecteezy.com
great businessman running towards the goal business run to the arrow Go To Goal Turtlesim In total, 3 goal positions have been provided. [udemy course] ros tutorial 4.4: This tutorial teaches you how to move your turtle in order to learn python. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. Users learn how to quickly. Go To Goal Turtlesim.
From www.completepayroll.com
Setting and Achieving Career Goals Complete Payroll Go To Goal Turtlesim This video demonstrates the go to goal behaviour of the turtle using proportional control. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. 1.moving in a straight line. This tutorial teaches you how to move your turtle in order to learn. Go To Goal Turtlesim.
From www.youtube.com
Codigo Gotogoal Turtlesim YouTube Go To Goal Turtlesim 1.moving in a straight line. [udemy course] ros tutorial 4.4: In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. This video demonstrates the go to goal behaviour of the turtle using proportional control. This tutorial teaches you how to move your turtle in order to learn python. How can i give a new. Go To Goal Turtlesim.
From automaticaddison.com
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison Go To Goal Turtlesim This tutorial teaches you how to move your turtle in order to learn python. How can i give a new goal and restart go_to_goalpose function while function is working. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In this link,. Go To Goal Turtlesim.
From www.youtube.com
How to make the Turtlesim to Go To a Goal Position and Orientation Go To Goal Turtlesim [udemy course] ros tutorial 4.4: In total, 3 goal positions have been provided. 1.moving in a straight line. This tutorial teaches you how to move your turtle in order to learn python. In this link, it tells how to do. Users learn how to quickly start with turtlebot simulators and it's control. In this tutorial, we will build ros nodes. Go To Goal Turtlesim.
From www.kristinabreanne.com
BONUS The GoTo Goal Setting Activity That Actually Works Go To Goal Turtlesim 1.moving in a straight line. [udemy course] ros tutorial 4.4: In this link, it tells how to do. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. How can i give a new goal and restart go_to_goalpose function while function is. Go To Goal Turtlesim.
From www.dreamstime.com
Go to the goal stock footage. Video of development, accuracy 300927226 Go To Goal Turtlesim [udemy course] ros tutorial 4.4: Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. This video demonstrates the go to goal behaviour of the turtle using proportional control. In this tutorial, we will build ros nodes to move the turtlesim robot. Go To Goal Turtlesim.
From www.youtube.com
Simple TurtleSim Project using ROS 2 Humble (Robot Operating System Go To Goal Turtlesim 1.moving in a straight line. Users learn how to quickly start with turtlebot simulators and it's control. In this link, it tells how to do. How can i give a new goal and restart go_to_goalpose function while function is working. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. In total, 3 goal. Go To Goal Turtlesim.
From www.youtube.com
turtlesim move to goal YouTube Go To Goal Turtlesim 1.moving in a straight line. How can i give a new goal and restart go_to_goalpose function while function is working. This tutorial teaches you how to move your turtle in order to learn python. Users learn how to quickly start with turtlebot simulators and it's control. Hi, recently, while i was learning on how to control turtle in turtlesim i. Go To Goal Turtlesim.
From automaticaddison.com
How to Move the Turtlesim Robot to Goal Locations ROS Automatic Addison Go To Goal Turtlesim In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. This video demonstrates the go to goal behaviour of the turtle using proportional control. This tutorial teaches you how to move your turtle in order to learn python. How can i give a new goal and restart go_to_goalpose function while function is working. [udemy. Go To Goal Turtlesim.
From www.youtube.com
Learning exercise Simple point to point PID control of turtle in ROS Go To Goal Turtlesim 1.moving in a straight line. This video demonstrates the go to goal behaviour of the turtle using proportional control. In this tutorial, we will build ros nodes to move the turtlesim robot to goal locations. Users learn how to quickly start with turtlebot simulators and it's control. In total, 3 goal positions have been provided. Hi, recently, while i was. Go To Goal Turtlesim.
From www.launchnotes.com
How to Successfully Achieve Your Goals Go To Goal Turtlesim Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In total, 3 goal positions have been provided. This video demonstrates the go to goal behaviour of the turtle using proportional control. How can i give a new goal and restart go_to_goalpose. Go To Goal Turtlesim.
From www.youtube.com
[Udemy ROS] Go to Goal in ROS (Python) YouTube Go To Goal Turtlesim 1.moving in a straight line. Hi, recently, while i was learning on how to control turtle in turtlesim i stumbled upon a tutorial on ros wiki on how to make a code in. In this link, it tells how to do. How can i give a new goal and restart go_to_goalpose function while function is working. This video demonstrates the. Go To Goal Turtlesim.