Visual Slam For Autonomous Ground Vehicles . In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Henning lategahn, andreas geiger and bernd kitt. Visual slam for autonomous ground vehicles. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the.
from www.semanticscholar.org
In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Henning lategahn, andreas geiger and bernd kitt. Visual slam for autonomous ground vehicles. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the.
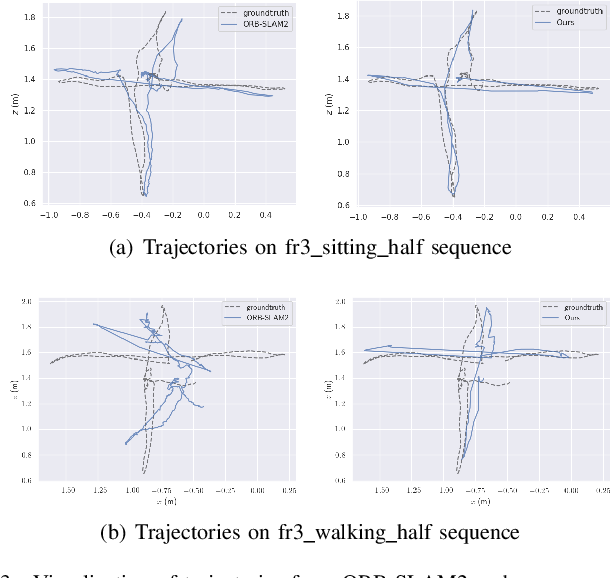
Figure 3 from A Novel Visual SLAM System for Autonomous Vehicles in
Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Henning lategahn, andreas geiger and bernd kitt. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the.
From scite.ai
A review of visual SLAM methods for autonomous driving vehicles Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Henning lategahn, andreas geiger and bernd kitt. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. A stereo visual. Visual Slam For Autonomous Ground Vehicles.
From mokchanic.tistory.com
Computer Vision & VisualSLAM Akashic_Records Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. Henning lategahn, andreas geiger and bernd kitt. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
Visual SLAM module for autonomous driving (Taxisat) YouTube Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct. Visual Slam For Autonomous Ground Vehicles.
From www.semanticscholar.org
Figure 10 from Multicamera visual SLAM for autonomous navigation of Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Henning lategahn, andreas geiger and bernd kitt. In recent years, visual simultaneous localization. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) A Deep Analysis of Visual SLAM Methods for Highly Automated and Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Henning lategahn, andreas geiger and bernd kitt. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. A. Visual Slam For Autonomous Ground Vehicles.
From www.ceva-dsp.com
VSLAM and LiDAR in Robotic Navigation CEVA’s Experts blog Visual Slam For Autonomous Ground Vehicles A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Visual slam for autonomous ground vehicles. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
SLAM Architecture for Autonomous Vehicles in LargeScale Orchard Visual Slam For Autonomous Ground Vehicles A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. This review provides a detailed survey of visual slam techniques and can serve. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
Introduction to SLAM for Autonomous Vehicles SkillLync Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. In this paper, different technologies of visual slam, where the main sensors are cameras,. Visual Slam For Autonomous Ground Vehicles.
From www.gestalt-robotics.com
SLAM — Gestalt Robotics Visual Slam For Autonomous Ground Vehicles Henning lategahn, andreas geiger and bernd kitt. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review. Visual Slam For Autonomous Ground Vehicles.
From www.rapyuta-robotics.com
Rapyuta Robotics is successfully evaluating Sevensense Visual SLAM for Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Henning lategahn, andreas geiger and bernd kitt. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey. Visual Slam For Autonomous Ground Vehicles.
From wavelab.uwaterloo.ca
Traffic Light and Sign Detection Waterloo Autonomous Vehicles Laboratory Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses. Visual Slam For Autonomous Ground Vehicles.
From www.mdpi.com
Electronics Free FullText Cooperative VisualSLAM System for UAV Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to. Visual Slam For Autonomous Ground Vehicles.
From wavelab.uwaterloo.ca
Laser SLAM Waterloo Autonomous Vehicles Laboratory Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph. Visual Slam For Autonomous Ground Vehicles.
From www.mdpi.com
JMSE Free FullText Towards MultiRobot Visual GraphSLAM for Visual Slam For Autonomous Ground Vehicles Henning lategahn, andreas geiger and bernd kitt. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. In this paper, different technologies of visual slam, where the main sensors. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) Visual SLAM for Autonomous Vehicles Navigating the Future Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Henning lategahn, andreas geiger and bernd kitt. In this paper, different technologies of. Visual Slam For Autonomous Ground Vehicles.
From www.semanticscholar.org
Multicamera visual SLAM for autonomous navigation of micro aerial Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. In this paper, different technologies of visual slam, where the main sensors are cameras,. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) Visual SLAM for autonomous MAVs with dual cameras Visual Slam For Autonomous Ground Vehicles A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Simultaneous localisation. Visual Slam For Autonomous Ground Vehicles.
From ukdiss.com
Simultaneous Localisation and Mapping (SLAM) for Autonomous Vehicles Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile. Visual Slam For Autonomous Ground Vehicles.
From www.kudan.io
KudanSLAM Commercialgrade SLAM Software for the future Kudan global Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Henning lategahn, andreas geiger and bernd kitt. In recent years, visual simultaneous localization and mapping (vslam) has. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) Visual SLAM for autonomous ground vehicles Visual Slam For Autonomous Ground Vehicles Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress. Visual Slam For Autonomous Ground Vehicles.
From global.canon
Visual SLAM Technology Canon Global Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. In this paper, different technologies of visual slam, where the main sensors are. Visual Slam For Autonomous Ground Vehicles.
From imaginghub.com
Imaginghub Blog LIDAR based 3D SLAM for autonomous vehicles Visual Slam For Autonomous Ground Vehicles A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Visual slam for autonomous ground vehicles. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) VISUAL SLAM FOR AUTONOMOUS VEHICLES NAVIGATING THE FUTURE Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the. Visual Slam For Autonomous Ground Vehicles.
From www.studypool.com
SOLUTION SLAM I Formulations and Sparsity_visual navigation for Visual Slam For Autonomous Ground Vehicles Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Henning lategahn, andreas geiger and bernd kitt. Visual slam for autonomous ground vehicles. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. A stereo. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
A Hierarchical and Compact SLAM Architecture for Autonomous Vehicles in Visual Slam For Autonomous Ground Vehicles Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Visual slam for autonomous ground vehicles. Henning lategahn, andreas geiger and bernd kitt. This review provides a detailed survey. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
A Hierarchical and Compact SLAM Architecture for Autonomous Vehicles in Visual Slam For Autonomous Ground Vehicles Henning lategahn, andreas geiger and bernd kitt. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of. Visual Slam For Autonomous Ground Vehicles.
From www.semanticscholar.org
Figure 3 from A Novel Visual SLAM System for Autonomous Vehicles in Visual Slam For Autonomous Ground Vehicles In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots. Visual Slam For Autonomous Ground Vehicles.
From www.semanticscholar.org
Figure 3 from LiDARBased ObjectLevel SLAM for Autonomous Vehicles Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. In recent years, visual simultaneous localization and mapping (vslam) has shown. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
AVPSLAM Semantic Visual Mapping and Localization for Autonomous Visual Slam For Autonomous Ground Vehicles Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. This review provides a detailed survey of visual slam techniques. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
Simultaneous localization and mapping for autonomous vehicles Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis on methodologies. Henning lategahn, andreas geiger and bernd kitt. Simultaneous localisation and mapping (slam) is one of the fundamental. Visual Slam For Autonomous Ground Vehicles.
From www.semanticscholar.org
Figure 1 from Cooperative VisualSLAM System for UAVBased Target Visual Slam For Autonomous Ground Vehicles A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile. Visual Slam For Autonomous Ground Vehicles.
From www.mdpi.com
Electronics Free FullText Monocular Vision SLAMBased UAV Visual Slam For Autonomous Ground Vehicles In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based on graph optimization, jointly optimizing the poses of vehicle. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
SLAM technology and LIDAR tests by FlyTech UAV YouTube Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Simultaneous localisation and mapping (slam) is one of the fundamental problems in autonomous mobile robots where a robot needs to reconstruct a previously. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints based. Visual Slam For Autonomous Ground Vehicles.
From www.researchgate.net
(PDF) An Intelligent Navigation Control Approach for Autonomous Visual Slam For Autonomous Ground Vehicles Henning lategahn, andreas geiger and bernd kitt. Visual slam for autonomous ground vehicles. This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. In this paper, different technologies of visual slam, where the main sensors are cameras, are surveyed with an emphasis. Visual Slam For Autonomous Ground Vehicles.
From www.youtube.com
Visual SLAM for driverless cars YouTube Visual Slam For Autonomous Ground Vehicles This review provides a detailed survey of visual slam techniques and can serve as a friendly guide for new researchers in the. Visual slam for autonomous ground vehicles. In recent years, visual simultaneous localization and mapping (vslam) has shown substantial progress and equipping it can lead. Visual slam for autonomous ground vehicles. A stereo visual slam system with road constraints. Visual Slam For Autonomous Ground Vehicles.