Planar Robot Definition . The web page explains the basic. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Explore different methods, examples, and. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Based on a new magnetic levitation technology invented at bosch, our researchers created a.
from www.chegg.com
Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. The web page explains the basic. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore different methods, examples, and.
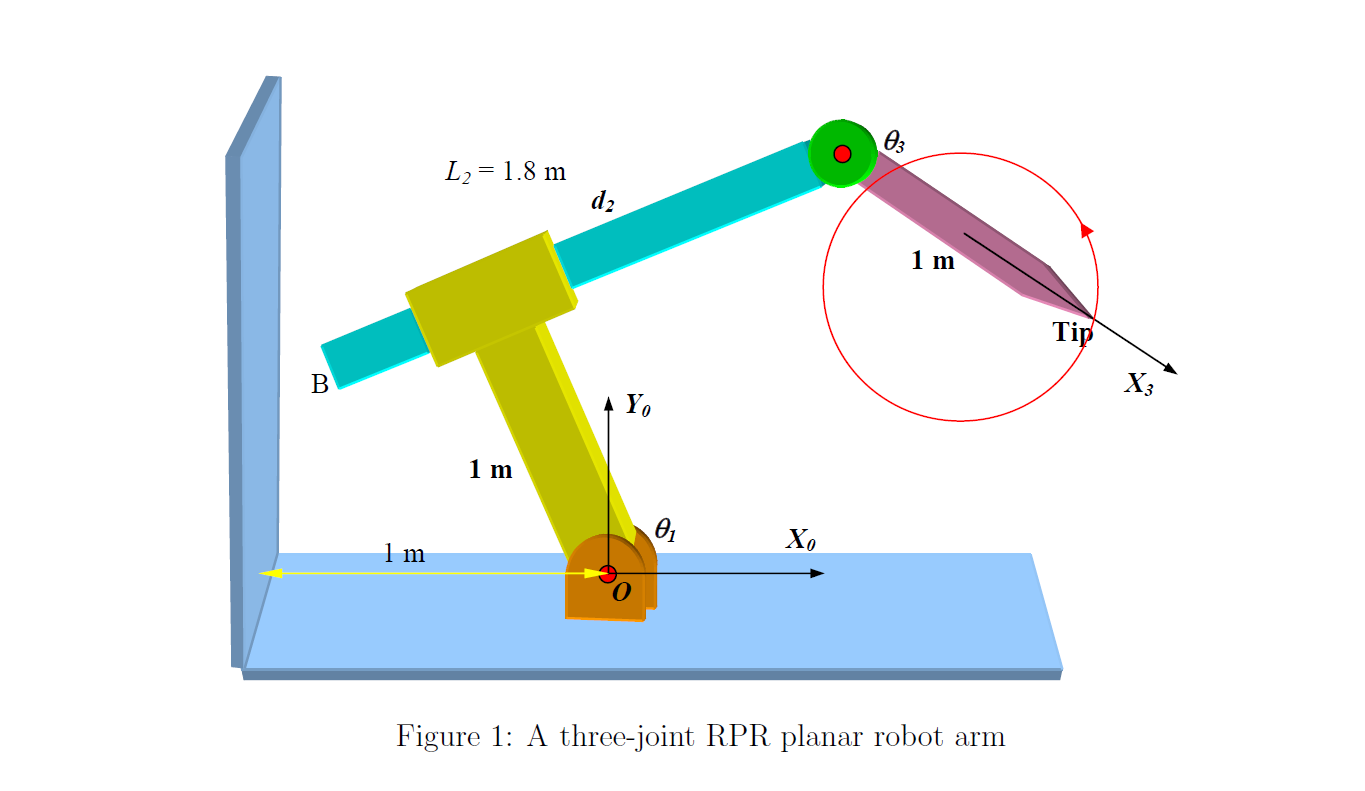
A 3joint RPR planar robot is sitting near a
Planar Robot Definition Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. The web page explains the basic. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Explore different methods, examples, and. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Explore the concepts of configuration space, workspace, degrees of. Based on a new magnetic levitation technology invented at bosch, our researchers created a.
From www.chegg.com
Solved Question 2 Consider the 3DOF robot (3 revolute Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive the equations of motion for a robot link based on newton's and euler's. Planar Robot Definition.
From www.youtube.com
L3 DH parameter 3DOF Planer robot Part 1 YouTube Planar Robot Definition A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Explore the concepts of configuration space, workspace, degrees of.. Planar Robot Definition.
From www.mdpi.com
Actuators Free FullText HighPrecision Control of Industrial Robot Planar Robot Definition The web page explains the basic. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Explore the concepts of configuration space, workspace, degrees of. Explore different methods, examples, and. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates.. Planar Robot Definition.
From www.bosch.com
Planar robots Bosch Global Planar Robot Definition Explore different methods, examples, and. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Learn how to describe a robot's layout and motion using joint coordinates and. Planar Robot Definition.
From www.autodesk.com
"Contour creation error" reported while surface planar load on contour Planar Robot Definition Explore different methods, examples, and. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. To begin with, we will restrict ourselves to. Planar Robot Definition.
From www.mdpi.com
Applied Sciences Free FullText TaskBased Design Approach Planar Robot Definition Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore different methods, examples, and. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Based on a new magnetic levitation technology invented at bosch, our researchers created. Planar Robot Definition.
From www.semanticscholar.org
Figure 1 from Effect of Friction on the Dynamical Analysis of Three Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. A robot arm (aka serial link. Planar Robot Definition.
From www.chegg.com
Solved Consider the twolink planar robot with l_1 = l_2 = Planar Robot Definition A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Based on a new magnetic levitation technology invented at bosch, our researchers created a. To begin with, we will restrict ourselves to a. Planar Robot Definition.
From www.researchgate.net
3 Schematic diagram of the 3R planar robot Download Scientific Diagram Planar Robot Definition Explore different methods, examples, and. Explore the concepts of configuration space, workspace, degrees of. The web page explains the basic. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Learn how to derive the equations of motion. Planar Robot Definition.
From skill-lync.com
Forward Kinematics of 2R Robotic Arm SkillLync Planar Robot Definition Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. The web page explains the basic. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. A robot arm (aka serial link manipulator) consists of a. Planar Robot Definition.
From www.chegg.com
Solved 1. For the simple 2axis, planar robot in the figure Planar Robot Definition Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore different methods, examples, and. Explore the concepts of configuration space, workspace, degrees of. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Learn how to describe. Planar Robot Definition.
From www.chegg.com
Task 2 Design of RRR planar robot manipulator (15 Planar Robot Definition Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. The web page explains the basic. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. To begin with, we will restrict ourselves to a class of robot mechanisms that. Planar Robot Definition.
From www.researchgate.net
Simulation of planar robot Download Scientific Diagram Planar Robot Definition Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Explore different methods, examples, and. Based. Planar Robot Definition.
From www.chegg.com
Solved Figure shows a threelink planar arm. Because all Planar Robot Definition Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore the concepts of configuration space, workspace, degrees of. Learn how to describe a robot's layout and motion using joint coordinates and. Planar Robot Definition.
From www.pinterest.co.kr
Forward and Inverse Kinematics with 3 DOF Planar Robot RRR w/ Code Planar Robot Definition Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Explore different methods, examples, and. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which. Planar Robot Definition.
From spectrum.ieee.org
Tencent’s New Wheeled Robot Flicks Its Tail To Do Backflips IEEE Spectrum Planar Robot Definition Explore the concepts of configuration space, workspace, degrees of. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Explore different. Planar Robot Definition.
From www.autodesk.com
Why units of elastic planar support are different than the ones for Planar Robot Definition Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Explore different methods, examples, and. A robot arm. Planar Robot Definition.
From www.spiedigitallibrary.org
Coordinate transformation of an industrial robot and its application in Planar Robot Definition Explore the concepts of configuration space, workspace, degrees of. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Explore different methods, examples, and. The web page explains the basic. Learn how to. Planar Robot Definition.
From www.chegg.com
Solved 318. Consider the twolink planar robot shown in Planar Robot Definition Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore the concepts of configuration space, workspace, degrees of. The web page explains the basic. Explore different methods, examples, and. Learn how to describe a robot's. Planar Robot Definition.
From www.researchgate.net
Schematic of parallel planar robot using MR damper [29]. Download Planar Robot Definition The web page explains the basic. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to derive and. Planar Robot Definition.
From www.chegg.com
. 1Link Planar Robot Forward Kinematics (a) Consider Planar Robot Definition Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. A robot arm (aka serial link manipulator) consists. Planar Robot Definition.
From www.researchgate.net
The simulation environment with a 4 DOF planar robot and a box to be Planar Robot Definition Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore different methods, examples, and. Based on a new magnetic levitation technology invented at bosch, our researchers created a. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which. Planar Robot Definition.
From www.researchgate.net
1 Planar robot mechanical description diagram. Download Scientific Planar Robot Definition Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Based on a new. Planar Robot Definition.
From www.autodesk.com
"Contour creation error" reported while surface planar load on contour Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. The web page explains the basic. Explore different methods, examples, and. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Learn how to describe a robot's layout and motion using joint coordinates. Planar Robot Definition.
From www.youtube.com
Types of Robot Configuration Cartesian Coordinate, Cylindrical Planar Robot Definition Explore different methods, examples, and. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Learn how to derive the equations of motion. Planar Robot Definition.
From mashable.com
A helpful robot assisted in the assembly of a remotecontrolled plane Planar Robot Definition Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. The web page explains the basic. Explore different methods, examples, and. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn. Planar Robot Definition.
From www.youtube.com
Design of a Planar CableDriven Parallel Robot for Non Contact Tasks Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. A robot arm. Planar Robot Definition.
From www.youtube.com
MCTE 521 Robot Motion Planning Lecture 2 Planar Robots 2/3 YouTube Planar Robot Definition The web page explains the basic. Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. Explore different methods, examples, and. Learn how to describe a robot's layout and motion using joint coordinates and spatial representations. Learn how. Planar Robot Definition.
From www.researchgate.net
Structure of a planar robot with 2 DOF. Download Scientific Diagram Planar Robot Definition Based on a new magnetic levitation technology invented at bosch, our researchers created a. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Explore the concepts of configuration space, workspace, degrees of. Explore different methods, examples, and. A robot arm (aka serial link manipulator) consists of a series of. Planar Robot Definition.
From stackoverflow.com
drake How to define contact definition of a robots planar feet to Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Explore the concepts of configuration space, workspace, degrees of. Explore different methods, examples, and. Learn how to derive the. Planar Robot Definition.
From www.numerade.com
SOLVED 426. A twolinkplanar robot is shown in Fig P4.26. (a Planar Robot Definition A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. The web page explains the basic. To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Learn how to describe a robot's layout and motion using joint coordinates and. Planar Robot Definition.
From www.chegg.com
3. Consider the planar RPR robot in Fig. 3, using the Planar Robot Definition A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Based on a new magnetic levitation technology invented at bosch, our researchers created a. To begin with, we. Planar Robot Definition.
From www.youtube.com
Kinematicfree Position Control of a 2DOF Planar Robot Arm YouTube Planar Robot Definition Based on a new magnetic levitation technology invented at bosch, our researchers created a. Explore different methods, examples, and. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. To begin with,. Planar Robot Definition.
From www.chegg.com
A 3joint RPR planar robot is sitting near a Planar Robot Definition To begin with, we will restrict ourselves to a class of robot mechanisms that work within a plane, i.e. Explore different methods, examples, and. Learn how to derive the equations of motion for a robot link based on newton's and euler's laws of motion. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and. Planar Robot Definition.
From robotics.stackexchange.com
kinematics 3R Planar robot arm singularity Robotics Stack Exchange Planar Robot Definition Explore different methods, examples, and. Learn how to derive and use equations of motion for robot dynamics using lagrange's equation and generalized coordinates. A robot arm (aka serial link manipulator) consists of a series of rigid links, connected by joints (motors), each of which has. Explore the concepts of configuration space, workspace, degrees of. Learn how to derive the equations. Planar Robot Definition.