Standard Basis Of R3 . Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. Thus = fi;j;kgis the standard basis for r3. In particular, \(\mathbb{r}^n \) has dimension \(n\). This is sometimes known as the standard basis. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Form a basis for \(\mathbb{r}^n \). Definition (a basis of a subspace). T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). We’ll want our bases to. The standard matrix has columns that are the images of the vectors of the standard basis. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is.
from www.chegg.com
This is sometimes known as the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. The standard matrix has columns that are the images of the vectors of the standard basis. Form a basis for \(\mathbb{r}^n \). A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥).
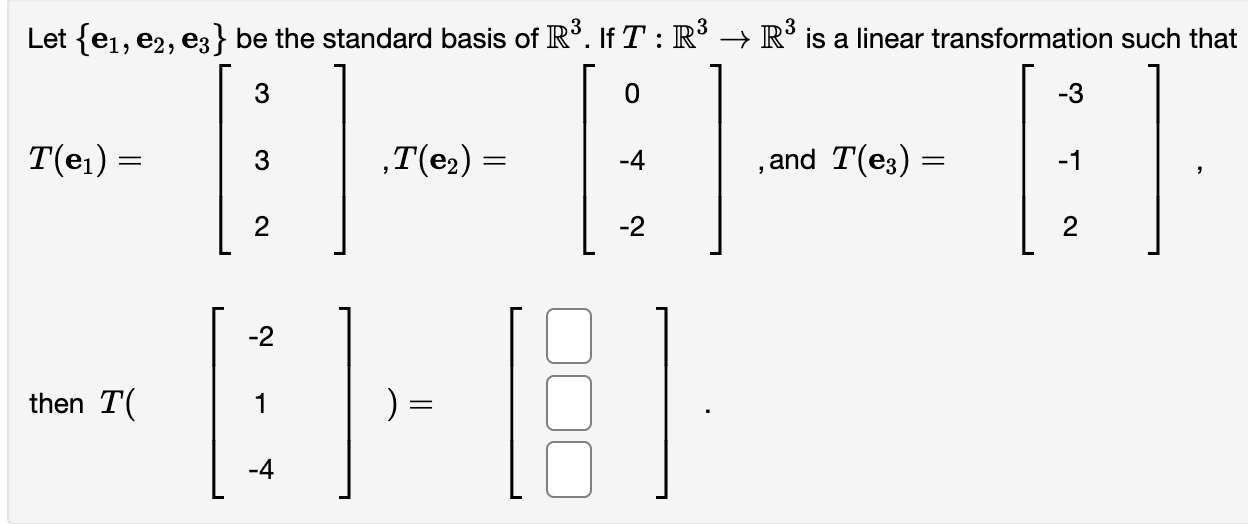
Solved Let {e1,e2, e3} be the standard basis of R3. If T R3
Standard Basis Of R3 We’ll want our bases to. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. The standard matrix has columns that are the images of the vectors of the standard basis. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. In particular, \(\mathbb{r}^n \) has dimension \(n\). Thus = fi;j;kgis the standard basis for r3. Definition (a basis of a subspace). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. This is sometimes known as the standard basis. Form a basis for \(\mathbb{r}^n \). We’ll want our bases to. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is.
From www.chegg.com
Solved Let E={e1,e2,e3} be the standard basis of R3 and let Standard Basis Of R3 Definition (a basis of a subspace). So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Form a basis for \(\mathbb{r}^n \). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. Thus = fi;j;kgis the standard basis for r3. The standard basis is $e_1. Standard Basis Of R3.
From www.numerade.com
SOLVED Let e1, e2, e3 be the standard basis vectors in R3 and consider Standard Basis Of R3 Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent,. Standard Basis Of R3.
From www.chegg.com
Solved 10. Let 1M 0 be the standard basis of R3. Consider Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Thus = fi;j;kgis the standard basis for r3. In particular, \(\mathbb{r}^n \) has dimension \(n\). So if $x = (x,y,z) \in \mathbb{r}^3$, it. Standard Basis Of R3.
From www.youtube.com
Basis Examples for Vector Spaces R^3 and Pn (Linear Independence and Standard Basis Of R3 Thus = fi;j;kgis the standard basis for r3. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. The standard matrix has columns that are the images of. Standard Basis Of R3.
From www.chegg.com
Solved CORRECTION STANDARD BASIS OF R2 NOT R3 AS IT IS Standard Basis Of R3 This is sometimes known as the standard basis. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. Thus = fi;j;kgis the standard basis for r3. T(⎡⎣⎢1 0. Standard Basis Of R3.
From www.chegg.com
Solved Consider the following "standard" basis of R3 over R Standard Basis Of R3 In particular, \(\mathbb{r}^n \) has dimension \(n\). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. Thus = fi;j;kgis the standard basis for r3. The standard matrix has columns that are the images of the vectors of the standard basis. The standard basis is $e_1 = (1,0,0)$, $e_2 =. Standard Basis Of R3.
From www.chegg.com
Solved Let. S = (e1, e2, e3) 1m; the standard basis of R3. Standard Basis Of R3 This is sometimes known as the standard basis. Definition (a basis of a subspace). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent,. Standard Basis Of R3.
From www.chegg.com
Solved 1. Let 0 01 be the ordered standard basis in R3, and Standard Basis Of R3 The standard matrix has columns that are the images of the vectors of the standard basis. This is sometimes known as the standard basis. Definition (a basis of a subspace). In particular, \(\mathbb{r}^n \) has dimension \(n\). A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. So. Standard Basis Of R3.
From www.chegg.com
Solved 10. Let be the standard basis of R3. Consider the Standard Basis Of R3 In particular, \(\mathbb{r}^n \) has dimension \(n\). T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Form a basis for \(\mathbb{r}^n \). The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. We’ll want our bases to. This is sometimes known as the standard basis. A standard basis, also called a natural basis, is a special. Standard Basis Of R3.
From www.chegg.com
Solved be the standard basis of R3. Consider the basis of Standard Basis Of R3 Thus = fi;j;kgis the standard basis for r3. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. We’ll want our bases to. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and. Standard Basis Of R3.
From www.coursehero.com
[Solved] . Let (a1, a2, a3, a4) be a standard basis of R4, and let Standard Basis Of R3 Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. This is sometimes known as the standard basis. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). In particular, \(\mathbb{r}^n \) has dimension \(n\). Definition (a basis of a subspace). Form a basis for \(\mathbb{r}^n \). We’ll want our bases to. The standard basis is $e_1. Standard Basis Of R3.
From www.chegg.com
Solved 3. The standard basis in R3 consists of the vectors Standard Basis Of R3 A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. Definition (a basis of a subspace). We’ll want our bases to. This is sometimes known as the standard basis. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. In particular, \(\mathbb{r}^n \) has. Standard Basis Of R3.
From www.youtube.com
Finding a Standard Matrix Using the Standard Basis YouTube Standard Basis Of R3 In particular, \(\mathbb{r}^n \) has dimension \(n\). We’ll want our bases to. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. Definition (a basis of a subspace). The standard matrix has columns that are the. Standard Basis Of R3.
From studyx.ai
Consider the linear transformation R3 arrow StudyX Standard Basis Of R3 The standard matrix has columns that are the images of the vectors of the standard basis. Definition (a basis of a subspace). In particular, \(\mathbb{r}^n \) has dimension \(n\). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. We’ll want our bases to. Distinguish bases (‘bases’ is the plural. Standard Basis Of R3.
From www.chegg.com
Solved Consider the 3 Dimensional vector space R3 with the Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. Form a basis for \(\mathbb{r}^n \). The standard matrix has. Standard Basis Of R3.
From fyogtzxon.blob.core.windows.net
Standard Basis Vectors For R3 at Nicholas Rodgers blog Standard Basis Of R3 T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. The standard matrix has columns that are the images of the vectors of the standard basis. Thus = fi;j;kgis the standard basis for r3. Definition (a basis of a subspace). Form a basis for \(\mathbb{r}^n \). In. Standard Basis Of R3.
From www.chegg.com
Solved Consider R3 with the standard inner product given by Standard Basis Of R3 Definition (a basis of a subspace). We’ll want our bases to. The standard matrix has columns that are the images of the vectors of the standard basis. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x =. Standard Basis Of R3.
From www.slideserve.com
PPT Quantum Computing PowerPoint Presentation, free download ID6832149 Standard Basis Of R3 T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Definition (a basis of a subspace). This is sometimes known as the standard basis. Form a basis for \(\mathbb{r}^n \). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. In particular, \(\mathbb{r}^n \) has dimension \(n\). Distinguish bases (‘bases’ is. Standard Basis Of R3.
From www.chegg.com
Solved Question 5.1 (10 marks) Let (ay, az, az, a_) be a Standard Basis Of R3 In particular, \(\mathbb{r}^n \) has dimension \(n\). So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Form a basis for \(\mathbb{r}^n \). Thus = fi;j;kgis the standard basis for r3. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. Definition. Standard Basis Of R3.
From www.chegg.com
Solved Consider the following "standard" basis of R3 over R Standard Basis Of R3 Thus = fi;j;kgis the standard basis for r3. In particular, \(\mathbb{r}^n \) has dimension \(n\). Definition (a basis of a subspace). T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). We’ll want our bases to. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and. Standard Basis Of R3.
From www.youtube.com
The Standard Basis of a General Linear Transformation YouTube Standard Basis Of R3 A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. So if $x =. Standard Basis Of R3.
From www.chegg.com
Solved Let E be the standard basis of R3 and another basis Standard Basis Of R3 Thus = fi;j;kgis the standard basis for r3. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). Form a basis for \(\mathbb{r}^n \). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. This is sometimes. Standard Basis Of R3.
From www.chegg.com
Solved Problem 11. Let S denote the standard basis of R3. Standard Basis Of R3 Thus = fi;j;kgis the standard basis for r3. Form a basis for \(\mathbb{r}^n \). This is sometimes known as the standard basis. Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a. Standard Basis Of R3.
From www.chegg.com
Solved Let {e1,e2,e3} be the standard basis of R3. If Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. Form a basis for \(\mathbb{r}^n \). We’ll want our bases to. Definition (a basis of a subspace). Thus = fi;j;kgis the standard basis for. Standard Basis Of R3.
From www.chegg.com
Solved Let TR3→R3 be a linear transformation defined by Standard Basis Of R3 Form a basis for \(\mathbb{r}^n \). The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Definition (a basis of a subspace). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is.. Standard Basis Of R3.
From www.chegg.com
Solved Let B=(e1,e2,e3) be the standard basis of R3 and Standard Basis Of R3 In particular, \(\mathbb{r}^n \) has dimension \(n\). The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Definition (a basis of a subspace). A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. We’ll want our bases to. The standard matrix has columns that. Standard Basis Of R3.
From www.slideserve.com
PPT 5.4 Basis And Dimension PowerPoint Presentation, free download Standard Basis Of R3 We’ll want our bases to. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). The standard matrix has columns that are the images of the vectors of the standard basis. In particular, \(\mathbb{r}^n \) has dimension \(n\). The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. This is sometimes known as the standard basis. Distinguish. Standard Basis Of R3.
From www.chegg.com
Solved Let {e1,e2, e3} be the standard basis of R3. If T R3 Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Thus = fi;j;kgis the standard basis for r3. In particular, \(\mathbb{r}^n \) has dimension \(n\). Definition (a basis of a subspace). T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). We’ll want our bases to. So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form. Standard Basis Of R3.
From fyogtzxon.blob.core.windows.net
Standard Basis Vectors For R3 at Nicholas Rodgers blog Standard Basis Of R3 So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Definition (a basis of a subspace). Distinguish bases (‘bases’ is the plural of ‘basis’) from other subsets of a set. We’ll want our bases to. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). This is sometimes known as the standard basis. Form a basis. Standard Basis Of R3.
From calcworkshop.com
Basis of Vector Spaces (A Linear Algebra Guide) Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. This is sometimes known as the standard basis. A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly. Standard Basis Of R3.
From www.chegg.com
Solved Recall that the standard basis of R3 is {E1, E2, E3}. Standard Basis Of R3 T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Thus = fi;j;kgis the standard basis for r3. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Form a basis for \(\mathbb{r}^n \). We’ll want our bases to. Distinguish bases (‘bases’. Standard Basis Of R3.
From www.chegg.com
Solved Consider the following "standard" basis of R3 over R Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single. This is sometimes known as the standard basis. Definition (a basis of a subspace). Thus = fi;j;kgis the standard basis for r3. Distinguish bases. Standard Basis Of R3.
From www.chegg.com
Solved 6. Let E be the standard basis of R3 and another Standard Basis Of R3 This is sometimes known as the standard basis. The standard matrix has columns that are the images of the vectors of the standard basis. Definition (a basis of a subspace). T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a. Standard Basis Of R3.
From www.chegg.com
Solved Let epsilon be the standard basis for R^3, and let B Standard Basis Of R3 The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. T(⎡⎣⎢1 0 0⎤⎦⎥), t(⎡⎣⎢0 1 0⎤⎦⎥), t(⎡⎣⎢0 0 1⎤⎦⎥). So if $x = (x,y,z) \in \mathbb{r}^3$, it has the form $$x = (x,y,z) =. Thus = fi;j;kgis the standard basis for r3. In particular, \(\mathbb{r}^n \) has dimension \(n\). A subset $s$ of a vector space. Standard Basis Of R3.
From www.chegg.com
Solved Let {e1,e2, e3} be the standard basis of R3. If T R3 Standard Basis Of R3 Definition (a basis of a subspace). Form a basis for \(\mathbb{r}^n \). In particular, \(\mathbb{r}^n \) has dimension \(n\). A subset $s$ of a vector space $v$ is called a basis if $s$ is linearly independent, and $s$ is. The standard basis is $e_1 = (1,0,0)$, $e_2 = (0,1,0)$, and $e_3 = (0,0,1)$. Thus = fi;j;kgis the standard basis for. Standard Basis Of R3.