Ground Vehicle Mathematical Model . A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This includes development of a longitudinal. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. In order to design a controller, a good representative model of the system is needed.
from www.chegg.com
These vehicles not only provide. This includes development of a longitudinal. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described.
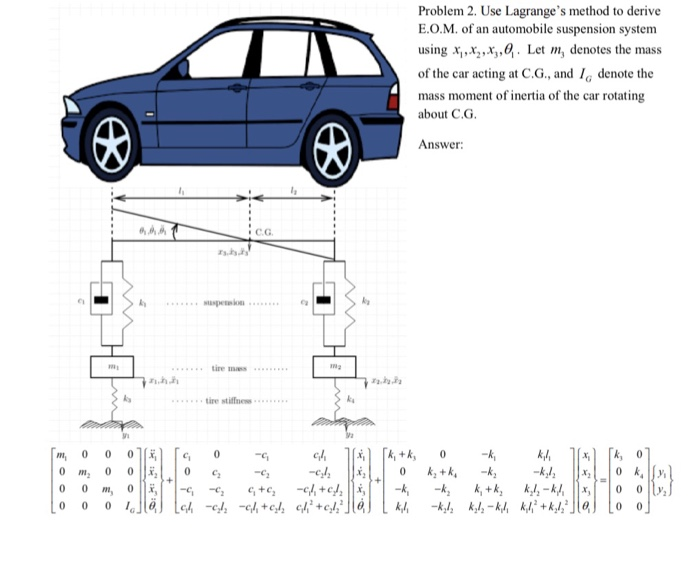
Solved Problem 2. Use Lagrange's method to derive E.O.M. of
Ground Vehicle Mathematical Model This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. In order to design a controller, a good representative model of the system is needed. These vehicles not only provide. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This includes development of a longitudinal.
From www.youtube.com
State Space Model For Active Quarter Car Suspension System YouTube Ground Vehicle Mathematical Model To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a. Ground Vehicle Mathematical Model.
From nrsyed.com
Numerical approach to studying vehicle dynamics with a halfcar suspension model • Najam R. Syed Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a controller, a good representative model of the system is needed. This. Ground Vehicle Mathematical Model.
From www.chegg.com
Solved Use Lagrange's equations to derive the equations of Ground Vehicle Mathematical Model This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not only provide. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power system components, we present a modeling. Ground Vehicle Mathematical Model.
From www.academia.edu
(PDF) Model Predictive Longitudinal Motion Control for the Unmanned Ground Vehicle With a Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. These vehicles not only provide. In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power system components, we present. Ground Vehicle Mathematical Model.
From journals.sagepub.com
Analysis of biodynamic model of seated human subject and optimization of the passenger ride Ground Vehicle Mathematical Model A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This includes development of a longitudinal. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics. Ground Vehicle Mathematical Model.
From studylib.net
Realtime Model Identification for Ground Vehicle Estimation using Extended Kalman Filter Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This includes development of a longitudinal. These vehicles not only provide. In order to design a. Ground Vehicle Mathematical Model.
From www.chegg.com
Solved Problem 2. Use Lagrange's method to derive E.O.M. of Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This includes development of a longitudinal. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis. Ground Vehicle Mathematical Model.
From www.youtube.com
HEV L11 Mathematical Models to Describe Vehicle Performance vkvsir YouTube Ground Vehicle Mathematical Model This includes development of a longitudinal. In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. These vehicles not only provide. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to. Ground Vehicle Mathematical Model.
From www.researchgate.net
(a) Multibody model of a ground vehicle. (b) Sequence of rotations of... Download Scientific Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This includes development of a longitudinal. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. A vehicle mathematical model, which is appropriate for both acceleration and. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This includes development of a longitudinal. A vehicle. Ground Vehicle Mathematical Model.
From www.semanticscholar.org
Figure 1 from A simple mathematical model of a vehicle with seat and occupant for studying the Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This includes development of a longitudinal. These vehicles not only provide. In order to design a controller, a good representative model of. Ground Vehicle Mathematical Model.
From www.researchgate.net
2 A hierarchical scheme of Autonomous Ground Vehicle systems. Download Scientific Diagram Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a controller, a good representative model of the system is needed. This includes development of a longitudinal. This thesis is about modeling of the longitudinal dynamics. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model These vehicles not only provide. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to design a controller, a good representative model of the system is needed. A vehicle. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both. Ground Vehicle Mathematical Model.
From www.mdpi.com
Applied Sciences Free FullText Path following for Autonomous Ground Vehicle Using DDPG Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not only provide. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. To e ectively integrate multiple power system components, we present a. Ground Vehicle Mathematical Model.
From www.chegg.com
Solved A car is modelled with a capability of pitch and Ground Vehicle Mathematical Model A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a controller, a good representative model of the system is needed. This includes development of a longitudinal. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. These vehicles not only provide. This thesis is about. Ground Vehicle Mathematical Model.
From www.researchgate.net
(PDF) Basic motion model of autonomous ground vehicle Ground Vehicle Mathematical Model In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This includes development of a longitudinal. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. A vehicle mathematical. Ground Vehicle Mathematical Model.
From www.researchgate.net
Mathematical drivercar model Download Scientific Diagram Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. To e ectively integrate multiple power system components, we present a modeling framework that can be. Ground Vehicle Mathematical Model.
From www.chegg.com
Consider the vehicle obtain its equations of motion Ground Vehicle Mathematical Model To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This includes development of a longitudinal. A vehicle mathematical. Ground Vehicle Mathematical Model.
From www.chegg.com
Solved QUESTION Figure 1.1/a) shows a motorcycle with a Ground Vehicle Mathematical Model In order to design a controller, a good representative model of the system is needed. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This includes development of a longitudinal. These vehicles not only provide. To e ectively integrate multiple power. Ground Vehicle Mathematical Model.
From www.semanticscholar.org
Figure 1 from Development of Mathematical Model of Ground Unmanned Vehicle Movement Semantic Ground Vehicle Mathematical Model To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. In order to. Ground Vehicle Mathematical Model.
From www.slideserve.com
PPT Vehicle Dynamics It’s all about the Calculus… PowerPoint Presentation ID1292622 Ground Vehicle Mathematical Model This includes development of a longitudinal. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to design a controller, a good representative model of the system is needed. These vehicles not only provide. A vehicle mathematical model, which is appropriate for both acceleration and deceleration,. Ground Vehicle Mathematical Model.
From www.slideserve.com
PPT Vehicle dynamics simulation using bond graphs PowerPoint Presentation ID561838 Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. In order to design a controller, a good. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model This includes development of a longitudinal. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. In order to design a controller, a good representative model of the system is needed. This paper presents mathematical models to estimate the kinematics and dynamics of. Ground Vehicle Mathematical Model.
From www.researchgate.net
(PDF) A Review of Mathematical Models Used to Estimate Wheeled and Tracked Unmanned Ground Ground Vehicle Mathematical Model In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This includes development of a longitudinal. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not only provide. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. This includes development of a. Ground Vehicle Mathematical Model.
From www.researchgate.net
An engagement between a UAS (A) and a ground vehicle (B). Download Scientific Diagram Ground Vehicle Mathematical Model This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. These vehicles not only provide. In order to design a controller, a good representative model of the system is needed. This includes development of a longitudinal. To e ectively integrate. Ground Vehicle Mathematical Model.
From www.mdpi.com
Mathematics Free FullText A Review of Mathematical Models Used to Estimate Wheeled and Ground Vehicle Mathematical Model These vehicles not only provide. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. To e ectively integrate multiple power system components, we present a. Ground Vehicle Mathematical Model.
From rishabh-singh.in
Intelligent NonIntrusive Inertial Sensor for Odometry of Ground Vehicle Rishabh Singh Ground Vehicle Mathematical Model This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. In order to design a controller, a good representative model of the system is needed. This includes development of a longitudinal. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. This thesis is about modeling of the longitudinal dynamics. Ground Vehicle Mathematical Model.
From www.mdpi.com
Applied Sciences Free FullText Model Predictive Stabilization Control of HighSpeed Ground Vehicle Mathematical Model This includes development of a longitudinal. These vehicles not only provide. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. In order to design a controller, a good representative model of the system. Ground Vehicle Mathematical Model.
From www.scribd.com
Solutions Manual Theory of Ground Vehicles 4th Edition Wong PDF Ground Vehicle Mathematical Model These vehicles not only provide. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. A vehicle mathematical model, which is appropriate for both acceleration. Ground Vehicle Mathematical Model.
From www.researchgate.net
Model of the ground wheeled vehicle Download Scientific Diagram Ground Vehicle Mathematical Model This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not only provide. This includes development of a longitudinal. A vehicle mathematical model, which is appropriate for both acceleration and deceleration, is described. In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power. Ground Vehicle Mathematical Model.
From www.mdpi.com
Applied Sciences Free FullText Model Predictive Stabilization Control of HighSpeed Ground Vehicle Mathematical Model This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. These vehicles not only provide. This paper presents mathematical models to estimate the kinematics and dynamics of wheeled and tracked robots. In order to design a controller, a good representative model of the system is needed. To e ectively integrate multiple power system components, we present. Ground Vehicle Mathematical Model.
From www.researchgate.net
Vehicle roll dynamics model with road bank angle. Download Scientific Diagram Ground Vehicle Mathematical Model In order to design a controller, a good representative model of the system is needed. This thesis is about modeling of the longitudinal dynamics of an unmanned ground vehicle. To e ectively integrate multiple power system components, we present a modeling framework that can be used to simulate and plan operation. These vehicles not only provide. A vehicle mathematical model,. Ground Vehicle Mathematical Model.