Safety Switch Mission Planner . The default method to arm is provided here is recommended for beginners. A user asks how to change the safety state of a rover using a mavlink message in mission planner. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) A safety switch can be used to enable/disable the outputs to motors and servos. The switch controls the “safety” state of the vehicle. On mission planner and push the connect button on the upper right). I read about the posibility about disabling the safety switch. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. Ensure the gcs is connected to the vehicle (i.e. I am running arduplan 3.1.1. (brd_safetyenable 0) when i have disabled it, the motors are. The previous version of mp apparently did not support.
from discuss.cubepilot.org
A user asks how to change the safety state of a rover using a mavlink message in mission planner. The previous version of mp apparently did not support. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. The switch controls the “safety” state of the vehicle. (brd_safetyenable 0) when i have disabled it, the motors are. I read about the posibility about disabling the safety switch. Ensure the gcs is connected to the vehicle (i.e. On mission planner and push the connect button on the upper right). I am running arduplan 3.1.1.
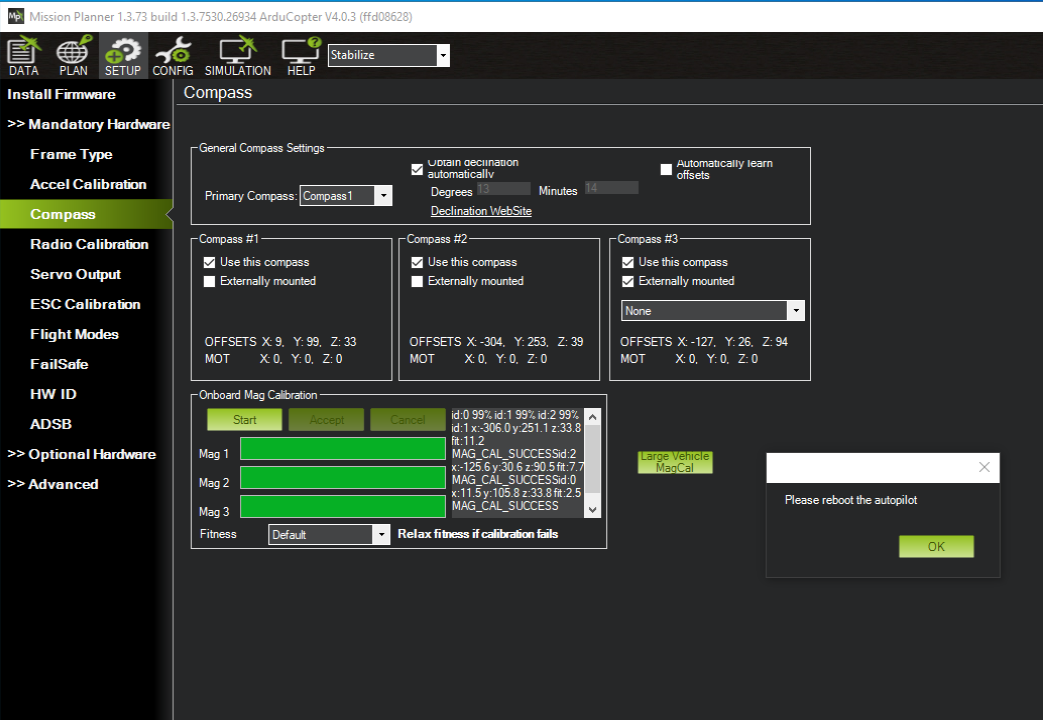
Here2 Compass Calibration & Safety Switch Issue Here GPS Cubepilot
Safety Switch Mission Planner I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. A safety switch can be used to enable/disable the outputs to motors and servos. I read about the posibility about disabling the safety switch. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) The previous version of mp apparently did not support. (brd_safetyenable 0) when i have disabled it, the motors are. Ensure the gcs is connected to the vehicle (i.e. On mission planner and push the connect button on the upper right). Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. A user asks how to change the safety state of a rover using a mavlink message in mission planner. I am running arduplan 3.1.1. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. The switch controls the “safety” state of the vehicle. The default method to arm is provided here is recommended for beginners.
From www.scribd.com
Safety Switches PDF Building Engineering Components Safety Switch Mission Planner (brd_safetyenable 0) when i have disabled it, the motors are. The previous version of mp apparently did not support. A user asks how to change the safety state of a rover using a mavlink message in mission planner. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. A safety switch can be used to. Safety Switch Mission Planner.
From discuss.cubepilot.org
Here2 Compass Calibration & Safety Switch Issue Here GPS Cubepilot Safety Switch Mission Planner I am running arduplan 3.1.1. I read about the posibility about disabling the safety switch. The default method to arm is provided here is recommended for beginners. A user asks how to change the safety state of a rover using a mavlink message in mission planner. On mission planner and push the connect button on the upper right). I recently. Safety Switch Mission Planner.
From fortress-safety.com
Safety Switches for Automation The Standard Range Fortress Safety Switch Mission Planner The switch controls the “safety” state of the vehicle. A safety switch can be used to enable/disable the outputs to motors and servos. On mission planner and push the connect button on the upper right). Ensure the gcs is connected to the vehicle (i.e. A user asks how to change the safety state of a rover using a mavlink message. Safety Switch Mission Planner.
From discuss.ardupilot.org
Exit Failsafe Mode in Mission Planner? Mission Planner ArduPilot Discourse Safety Switch Mission Planner The previous version of mp apparently did not support. The default method to arm is provided here is recommended for beginners. A safety switch can be used to enable/disable the outputs to motors and servos. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I read about the posibility about disabling the safety switch.. Safety Switch Mission Planner.
From guide.robsense.com
Configure with Mission Planner Phenix Guide Safety Switch Mission Planner The previous version of mp apparently did not support. (brd_safetyenable 0) when i have disabled it, the motors are. I read about the posibility about disabling the safety switch. I am running arduplan 3.1.1. A user asks how to change the safety state of a rover using a mavlink message in mission planner. Ensure the gcs is connected to the. Safety Switch Mission Planner.
From www.youtube.com
Introduction to Mission Planner YouTube Safety Switch Mission Planner The switch controls the “safety” state of the vehicle. Ensure the gcs is connected to the vehicle (i.e. (brd_safetyenable 0) when i have disabled it, the motors are. I read about the posibility about disabling the safety switch. The previous version of mp apparently did not support. A safety switch can be used to enable/disable the outputs to motors and. Safety Switch Mission Planner.
From www.se.com
การเลือกใช้ Safety switch แบบ 2 สาย Non fuse ขนาด 30 200A ชนิด Heavy duty ที่สอดคล้องมาตรฐาน Safety Switch Mission Planner The default method to arm is provided here is recommended for beginners. I am running arduplan 3.1.1. I read about the posibility about disabling the safety switch. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) The previous version of mp apparently did not support.. Safety Switch Mission Planner.
From ardupilot.org
Mission Planner Flight PLAN — Mission Planner documentation Safety Switch Mission Planner Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) The default method to arm is provided here is recommended for beginners. On mission planner and push the connect button on the upper right). I recently upgraded to mission planner 1.3.41.7 beta so i can create. Safety Switch Mission Planner.
From discuss.ardupilot.org
Mission Planner HUD says (SAFETY) and I cannot use the throttle Rover 4.1 ArduPilot Discourse Safety Switch Mission Planner Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) On mission planner and push the connect button on the upper right). A safety switch can be used to enable/disable the outputs to motors and servos. I read about the posibility about disabling the safety switch.. Safety Switch Mission Planner.
From nannigalaxy.github.io
How to set ARMDISARM Switch in Mission Planner and RC Transmitter for Pixhawk NGx Space Safety Switch Mission Planner Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. A safety switch can be used to enable/disable the outputs to motors and servos. On mission planner and push the connect button on the upper right). The switch controls the “safety” state of the vehicle. Turn on your radio transmitter and attempt to arm the. Safety Switch Mission Planner.
From ardupilot.org
Radio Control Calibration — Mission Planner documentation Safety Switch Mission Planner A safety switch can be used to enable/disable the outputs to motors and servos. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. I read about the posibility about disabling the safety switch. A user asks how to change the safety state of a rover using a mavlink message in mission planner. The previous version. Safety Switch Mission Planner.
From www.youtube.com
Mission Planner Part 4 Putting it all Together YouTube Safety Switch Mission Planner (brd_safetyenable 0) when i have disabled it, the motors are. I read about the posibility about disabling the safety switch. A safety switch can be used to enable/disable the outputs to motors and servos. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. On mission planner and push the connect button on the upper right).. Safety Switch Mission Planner.
From device.report
SIEMENS HM656A VBII Safety Switches Instruction Manual Safety Switch Mission Planner (brd_safetyenable 0) when i have disabled it, the motors are. A user asks how to change the safety state of a rover using a mavlink message in mission planner. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. A safety switch can be used to enable/disable the outputs to motors and servos. The previous. Safety Switch Mission Planner.
From studylib.net
SAFETY SWITCH Safety Switch Mission Planner I read about the posibility about disabling the safety switch. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. The default method to arm is provided here is recommended for beginners. A user asks how to change the safety state. Safety Switch Mission Planner.
From docslib.org
Safety Switches Design Guide DG008001EN Effective February 2020 General Description 28 .12 Safety Switch Mission Planner The switch controls the “safety” state of the vehicle. The default method to arm is provided here is recommended for beginners. I read about the posibility about disabling the safety switch. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) Learn how to arm and. Safety Switch Mission Planner.
From ardupilot.org
PreArm Safety Checks — Copter documentation Safety Switch Mission Planner The default method to arm is provided here is recommended for beginners. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. A safety switch can be used to enable/disable the outputs to motors and servos. On mission planner and push the connect button on the upper right). Ensure the gcs is connected to the vehicle. Safety Switch Mission Planner.
From www.youtube.com
Mission Planner Part 2 Advanced Flight Planning YouTube Safety Switch Mission Planner I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. I read about the posibility about disabling the safety switch. The previous version of mp apparently did not support. On mission planner and push the connect button on the upper right). A user asks how to change the safety state of a rover using a mavlink. Safety Switch Mission Planner.
From discuss.ardupilot.org
Mission Planner Motor Configuration General ArduPilot Discourse Safety Switch Mission Planner Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. (brd_safetyenable 0) when i have disabled it, the motors are. I am running arduplan 3.1.1. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) On mission planner and push the. Safety Switch Mission Planner.
From www.youtube.com
How to Use the Mission Planner Waypoint Mission Planner YouTube Safety Switch Mission Planner The switch controls the “safety” state of the vehicle. On mission planner and push the connect button on the upper right). Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) The default method to arm is provided here is recommended for beginners. Ensure the gcs. Safety Switch Mission Planner.
From www.youtube.com
Installing Mission Planner YouTube Safety Switch Mission Planner Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I read about the posibility about disabling the safety switch. The default method to arm is provided here is recommended for beginners. The switch controls the “safety” state of the vehicle. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is. Safety Switch Mission Planner.
From studylib.net
Type VBII Safety Switches Safety Switch Mission Planner Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) I read about the posibility about disabling the safety switch. Ensure the gcs is connected to the vehicle (i.e. The default method to arm is provided here is recommended for beginners. Learn how to arm and. Safety Switch Mission Planner.
From ardupilot.org
PreArm Safety Checks — Copter documentation Safety Switch Mission Planner On mission planner and push the connect button on the upper right). I read about the posibility about disabling the safety switch. (brd_safetyenable 0) when i have disabled it, the motors are. I am running arduplan 3.1.1. Ensure the gcs is connected to the vehicle (i.e. The switch controls the “safety” state of the vehicle. A safety switch can be. Safety Switch Mission Planner.
From guide.robsense.com
Configure with Mission Planner Phenix Guide Safety Switch Mission Planner A user asks how to change the safety state of a rover using a mavlink message in mission planner. On mission planner and push the connect button on the upper right). A safety switch can be used to enable/disable the outputs to motors and servos. The previous version of mp apparently did not support. The default method to arm is. Safety Switch Mission Planner.
From www.dcscorp.com
Mission Planning DCS Corporation Safety Switch Mission Planner Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) A user asks how to change the safety state of a rover using a mavlink message in mission planner. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. The default method. Safety Switch Mission Planner.
From www.youtube.com
Mission Planner Part 3 Advanced Flight Planning YouTube Safety Switch Mission Planner A safety switch can be used to enable/disable the outputs to motors and servos. A user asks how to change the safety state of a rover using a mavlink message in mission planner. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) I recently upgraded. Safety Switch Mission Planner.
From medium.com
How to set ARMDISARM Switch in Mission Planner and RC Transmitter for Pixhawk by Nandan Safety Switch Mission Planner Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) A safety switch can be used to enable/disable the outputs to motors and servos. Ensure the gcs is connected to the vehicle (i.e. The previous version of mp apparently did not support. Learn how to arm. Safety Switch Mission Planner.
From dokumen.tips
(PDF) MFSeries Safety Switches Instruction Guide · noncontact safety switch for use in machine Safety Switch Mission Planner I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. I am running arduplan 3.1.1. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. The default method to arm is provided here is recommended for beginners. The switch controls the “safety” state of the vehicle. The previous version of mp. Safety Switch Mission Planner.
From discuss.ardupilot.org
Cannot change flight mode switch channel in Mission Planner Mission Planner ArduPilot Discourse Safety Switch Mission Planner The previous version of mp apparently did not support. A safety switch can be used to enable/disable the outputs to motors and servos. Ensure the gcs is connected to the vehicle (i.e. The default method to arm is provided here is recommended for beginners. On mission planner and push the connect button on the upper right). (brd_safetyenable 0) when i. Safety Switch Mission Planner.
From www.youtube.com
MIssion Planner Secrets and Hidden Features YouTube Safety Switch Mission Planner The default method to arm is provided here is recommended for beginners. (brd_safetyenable 0) when i have disabled it, the motors are. A safety switch can be used to enable/disable the outputs to motors and servos. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch). Safety Switch Mission Planner.
From discuss.ardupilot.org
Swaming with Mission Planner Blog ArduPilot Discourse Safety Switch Mission Planner I am running arduplan 3.1.1. (brd_safetyenable 0) when i have disabled it, the motors are. Ensure the gcs is connected to the vehicle (i.e. The previous version of mp apparently did not support. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I read about the posibility about disabling the safety switch. Turn on. Safety Switch Mission Planner.
From www.youtube.com
Mission Planner Intro 04 How To Set Telemetry YouTube Safety Switch Mission Planner (brd_safetyenable 0) when i have disabled it, the motors are. The previous version of mp apparently did not support. I am running arduplan 3.1.1. Turn on your radio transmitter and attempt to arm the vehicle (regular procedure is using throttle down, yaw right or via an rcx_option switch) A user asks how to change the safety state of a rover. Safety Switch Mission Planner.
From nannigalaxy.github.io
How to set ARMDISARM Switch in Mission Planner and RC Transmitter for Pixhawk NGx Space Safety Switch Mission Planner On mission planner and push the connect button on the upper right). I read about the posibility about disabling the safety switch. The switch controls the “safety” state of the vehicle. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. I am running arduplan 3.1.1. Learn how to arm and disarm your rover using transmitter. Safety Switch Mission Planner.
From www.practicalmachinist.com
Programming safety switches Safety Switch Mission Planner Ensure the gcs is connected to the vehicle (i.e. The default method to arm is provided here is recommended for beginners. The previous version of mp apparently did not support. A user asks how to change the safety state of a rover using a mavlink message in mission planner. I read about the posibility about disabling the safety switch. I. Safety Switch Mission Planner.
From ardupilot.org
ArduPilot Copter — Copter documentation Safety Switch Mission Planner (brd_safetyenable 0) when i have disabled it, the motors are. I am running arduplan 3.1.1. The previous version of mp apparently did not support. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I read about the posibility about disabling. Safety Switch Mission Planner.
From dokumen.tips
(PDF) GE Safety Switches SpecSetter™ Safety Switches, Accessories• Meet or exceed NEMA Enclosed Safety Switch Mission Planner The switch controls the “safety” state of the vehicle. The default method to arm is provided here is recommended for beginners. I recently upgraded to mission planner 1.3.41.7 beta so i can create a geofence. Learn how to arm and disarm your rover using transmitter sticks, switches or ground station. I read about the posibility about disabling the safety switch.. Safety Switch Mission Planner.