Extended Target Tracking Using Phd Filters . One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an extension of thephd.
from www.semanticscholar.org
In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Mahler [6] has presented an extension of thephd.
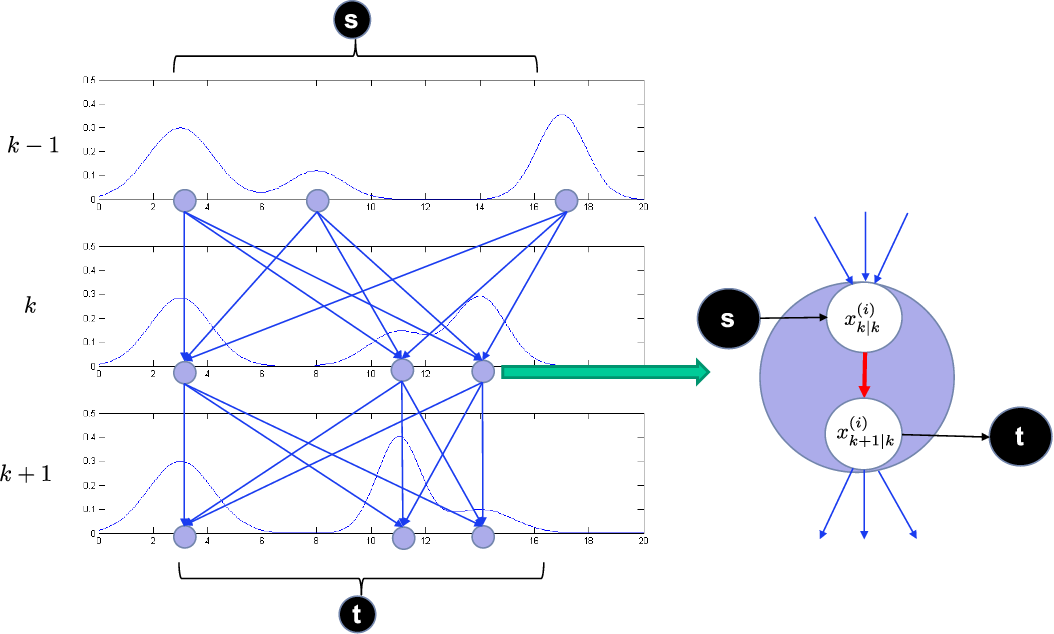
Figure 3 from Network Flow Labeling for Extended Target Tracking PHD
Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In order to obtain the correct target state. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Mahler [6] has presented an extension of thephd. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee.
From www.researchgate.net
(PDF) Extended emitter target tracking using GMPHD filter Extended Target Tracking Using Phd Filters Mahler [6] has presented an extension of thephd. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure. Extended Target Tracking Using Phd Filters.
From theses.eurasip.org
Extended target tracking using PHD filters EURASIP Extended Target Tracking Using Phd Filters One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In. Extended Target Tracking Using Phd Filters.
From deepai.org
Extended Object Tracking Using Sets Of Trajectories with a PHD Filter Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. Mahler [6] has presented an extension of thephd. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) PHD Filter for Multipath Target Tracking Using Box Particle Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Mahler [6] has presented an. Extended Target Tracking Using Phd Filters.
From www.mdpi.com
Remote Sensing Free FullText Gaussian Process Gaussian Mixture PHD Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an extension of thephd. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
Extended target tracking results in S1.... Download Scientific Diagram Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 4 from A labeled PHD filter for extended target tracking in Extended Target Tracking Using Phd Filters In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an extension of thephd. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member,. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 5 from A Gaussian mixture PHD filter for extended target Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Karl. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) Gaussian Process Gaussian Mixture PHD Filter for 3D Multiple Extended Target Tracking Using Phd Filters In order to obtain the correct target state. Mahler [6] has presented an extension of thephd. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. The topic of this paper is tracking of extended targets, such as those shown in figure. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 8 from Application of an Efficient GraphBased Partitioning Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. In order to obtain the correct target state. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 1 from Bayesian multiple target tracking in forward scan sonar Extended Target Tracking Using Phd Filters In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Mahler [6] has presented an extension of thephd. Karl. Extended Target Tracking Using Phd Filters.
From www.mdpi.com
Remote Sensing Free FullText Gaussian Process Gaussian Mixture PHD Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) An Improved GMPHD Approach for Multi Extended Target Tracking Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. The topic of this paper is tracking of extended targets, such as those shown in figure 1. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 3 from Network Flow Labeling for Extended Target Tracking PHD Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Mahler [6] has presented an extension of thephd. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 1 from A Gaussian mixture PHD filter for extended target Extended Target Tracking Using Phd Filters In order to obtain the correct target state. Mahler [6] has presented an extension of thephd. The topic of this paper is tracking of extended targets, such as those shown in figure 1. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member,. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 15 from Application of an Efficient GraphBased Partitioning Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Mahler [6] has presented an. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) A GGIWPHD Filter for Multiple NonEllipsoidal Extended Targets Extended Target Tracking Using Phd Filters One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an extension of thephd. In this paper, we study using probability hypothesis density. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 1 from Tracking of Spline Modeled Extended Targets Using a Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. Mahler [6] has presented an. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 1 from Extended Emitter Target Tracking Using GMPHD Filter Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In order to obtain the correct target state. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler [6] has presented an extension of. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) A labeled PHD filter for extended target tracking in lidar data Extended Target Tracking Using Phd Filters Mahler [6] has presented an extension of thephd. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In order to obtain the correct target state. Karl granstr. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 3 from A Labeled GMPHD Filter for Explicitly Tracking Multiple Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 13 from Application of an Efficient GraphBased Partitioning Extended Target Tracking Using Phd Filters Mahler [6] has presented an extension of thephd. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member,. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) A PHD Filter for Tracking Multiple Extended Targets Using Random Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). In order to obtain the correct target state. Mahler [6] has presented an extension of thephd. The topic. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) Radar multitarget tracking method with parallel PHD filter Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. In order to obtain the correct target state. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. Mahler [6] has presented an extension of thephd. The topic of this paper is tracking of extended targets, such as those shown in figure. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 4 from Gaussian Process Gaussian Mixture PHD Filter for 3D Extended Target Tracking Using Phd Filters One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. Mahler [6] has presented an extension of thephd. In this paper, we study using probability hypothesis density (phd) filter to track single. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 1 from A robust and fast partitioning algorithm for extended Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Mahler [6] has presented an extension of thephd. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) A Gaussian mixture PHD filter for extended target tracking Extended Target Tracking Using Phd Filters Mahler [6] has presented an extension of thephd. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using. Extended Target Tracking Using Phd Filters.
From www.researchgate.net
(PDF) Improved GGIWPHD filter for maneuvering nonellipsoidal extended Extended Target Tracking Using Phd Filters Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. Mahler [6] has presented an extension of thephd. In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of targets and the target states is to use. Extended Target Tracking Using Phd Filters.
From www.mdpi.com
Remote Sensing Free FullText Gaussian Process Gaussian Mixture PHD Extended Target Tracking Using Phd Filters The topic of this paper is tracking of extended targets, such as those shown in figure 1. In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl. Extended Target Tracking Using Phd Filters.
From www.mathworks.com
Extended Target Tracking with Multipath Radar Reflections in Simulink Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In order to obtain the correct target state. The topic of this paper is tracking of extended targets, such as those shown in figure 1. One way to model the number of. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 7 from A labeled PHD filter for extended target tracking in Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Mahler [6] has presented an extension. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 17 from Application of an Efficient GraphBased Partitioning Extended Target Tracking Using Phd Filters One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). In order to obtain the correct target state. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. The topic of this paper is tracking of extended targets, such as those shown. Extended Target Tracking Using Phd Filters.
From www.mdpi.com
Remote Sensing Free FullText Gaussian Process Gaussian Mixture PHD Extended Target Tracking Using Phd Filters In this paper, we study using probability hypothesis density (phd) filter to track single extended target. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). The topic of this paper is tracking of extended targets, such as those shown in figure 1. Mahler. Extended Target Tracking Using Phd Filters.
From www.semanticscholar.org
Figure 4 from Application of an Efficient GraphBased Partitioning Extended Target Tracking Using Phd Filters Mahler [6] has presented an extension of thephd. The topic of this paper is tracking of extended targets, such as those shown in figure 1. In order to obtain the correct target state. One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Karl. Extended Target Tracking Using Phd Filters.
From studylib.net
Extended Target Tracking Using a GaussianMixture PHD Filter Extended Target Tracking Using Phd Filters One way to model the number of targets and the target states is to use random finite sets, which leads to the probability hypothesis density (phd). Mahler [6] has presented an extension of thephd. Karl granstr ̈om, member, ieee, christian lundquist, and umut orguner, member, ieee. In this paper, we study using probability hypothesis density (phd) filter to track single. Extended Target Tracking Using Phd Filters.