Ignition Gazebo Camera Plugin . In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. The plugin allows you to: This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. A camera sensor is included in a world. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. With ignition, it is a little bit different.
from wiki.ros.org
This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. The plugin allows you to: In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. With ignition, it is a little bit different. A camera sensor is included in a world. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2.
hector_gazebo_thermal_camera ROS Wiki
Ignition Gazebo Camera Plugin A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. The plugin allows you to: Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. With ignition, it is a little bit different. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A camera sensor is included in a world. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2.
From robotics.stackexchange.com
ros add camera plugin in gazebo Robotics Stack Exchange Ignition Gazebo Camera Plugin In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. With ignition, it is a little bit different. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since this tutorial. Ignition Gazebo Camera Plugin.
From www.youtube.com
GSoC'18 Depth Camera Plugin Gazebo YouTube Ignition Gazebo Camera Plugin Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data. Ignition Gazebo Camera Plugin.
From rospibot.azw.pt
Camera calibration gazebo Robots RosPiBot Ignition Gazebo Camera Plugin The plugin allows you to: This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. A camera sensor is included in a world. With ignition,. Ignition Gazebo Camera Plugin.
From qiita.com
Ignition Gazebo チュートリアル インストールとROS 2との連携 ROS2 Qiita Ignition Gazebo Camera Plugin Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. A camera sensor is included in a world. The plugin allows you to: A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this tutorial will show how. Ignition Gazebo Camera Plugin.
From index.ros.org
ROS Package ros_ign_gazebo_demos Ignition Gazebo Camera Plugin The plugin allows you to: Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A camera sensor is included in a world. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. In this tutorial, you launched. Ignition Gazebo Camera Plugin.
From nullpo24.hatenablog.com
Ignition Gazebo Plugin作成の手引き ふるお〜と! FullAuto Ignition Gazebo Camera Plugin With ignition, it is a little bit different. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Since this tutorial. Ignition Gazebo Camera Plugin.
From index.ros.org
ROS Package ros_ign_gazebo_demos Ignition Gazebo Camera Plugin A camera sensor is included in a world. With ignition, it is a little bit different. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since. Ignition Gazebo Camera Plugin.
From github.com
GitHub artefact/navigation2_ignition_gazebo_example Minimal Ignition Gazebo Camera Plugin In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. The plugin allows you to: A camera sensor is included. Ignition Gazebo Camera Plugin.
From kiranpalla.com
[ROS] Using Gazebo Camera Plugin Ignition Gazebo Camera Plugin This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. With ignition, it is a little bit different. A camera sensor is included in a world. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros. Ignition Gazebo Camera Plugin.
From cyaninfinite.com
Cyan Infinite Getting started with Ignition Gazebo Ignition Gazebo Camera Plugin A camera sensor is included in a world. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. With ignition, it is a little bit different. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. In this. Ignition Gazebo Camera Plugin.
From www.youtube.com
A Review of Gazebo Ignition Citadel YouTube Ignition Gazebo Camera Plugin Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A camera sensor is included in a world. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. A simple example demonstrating the use of ros_ign_bridge to. Ignition Gazebo Camera Plugin.
From community.gazebosim.org
GSoC 2021 Machine Learning Extension to Ignition Gazebo General Ignition Gazebo Camera Plugin Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A camera sensor is included in a world. With ignition, it is a little bit different. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor,. Ignition Gazebo Camera Plugin.
From index.ros.org
ROS Package ros_ign_gazebo_demos Ignition Gazebo Camera Plugin Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Not all the plugins have been ported over from gazebo,. Ignition Gazebo Camera Plugin.
From www.infoq.com
Open Source Robotics Getting Started with Gazebo and ROS 2 Ignition Gazebo Camera Plugin With ignition, it is a little bit different. The plugin allows you to: A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. This gsoc project aimed to. Ignition Gazebo Camera Plugin.
From community.gazebosim.org
GSoC 2020 Ignition Gazebo Optical Tactile Sensor Plugin General Ignition Gazebo Camera Plugin The plugin allows you to: In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since this tutorial will show how. Ignition Gazebo Camera Plugin.
From www.youtube.com
Navigation2 simulation using an ignition gazebo YouTube Ignition Gazebo Camera Plugin In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since this tutorial will show how to use a segmentation camera. Ignition Gazebo Camera Plugin.
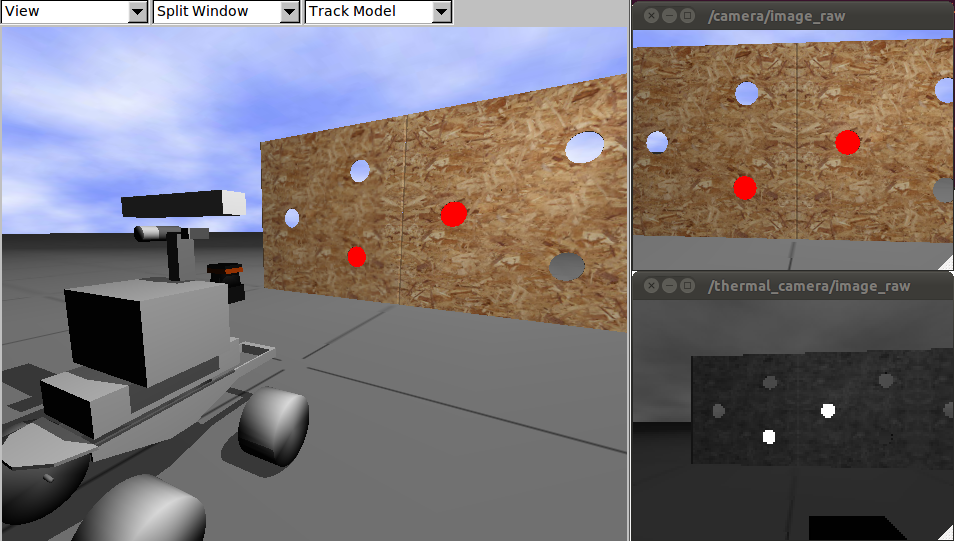
From staging.gazebosim.org
Gazebo Sensors Thermal Camera in Ignition Gazebo Ignition Gazebo Camera Plugin With ignition, it is a little bit different. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A simple example demonstrating the use of ros_ign_bridge. Ignition Gazebo Camera Plugin.
From www.youtube.com
gazebo model plugin tutorial YouTube Ignition Gazebo Camera Plugin A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. The plugin allows you to: A camera sensor is included in a world. This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. In this. Ignition Gazebo Camera Plugin.
From robotics.stackexchange.com
Can't use Ignition Gazebo thermal camera plugin with gpu lidar sensor Ignition Gazebo Camera Plugin A camera sensor is included in a world. With ignition, it is a little bit different. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. The plugin. Ignition Gazebo Camera Plugin.
From github.com
[gazebo_plugins] RGB channel flipped with R8G8B8 with openni_camera Ignition Gazebo Camera Plugin Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Since this tutorial will show how to use a segmentation camera. Ignition Gazebo Camera Plugin.
From cyaninfinite.com
Cyan Infinite Getting started with Ignition Gazebo Ignition Gazebo Camera Plugin A camera sensor is included in a world. With ignition, it is a little bit different. The plugin allows you to: Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors,. Ignition Gazebo Camera Plugin.
From community.gazebosim.org
New releases for Ignition Fortress 20211213 Releases Gazebo Community Ignition Gazebo Camera Plugin This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. With ignition, it is a little bit different. A camera sensor is included in a. Ignition Gazebo Camera Plugin.
From www.youtube.com
Turtlebot3 Ignition Gazebo Camera Test YouTube Ignition Gazebo Camera Plugin The plugin allows you to: Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. With ignition, it is a. Ignition Gazebo Camera Plugin.
From www.youtube.com
[ROS] Using Gazebo Camera Plugin YouTube Ignition Gazebo Camera Plugin Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. The plugin allows you to: A camera sensor is included in a world. In this tutorial, you. Ignition Gazebo Camera Plugin.
From qiita.com
Ignition GazeboとROS2の連携を学ぶ! ROS2 Qiita Ignition Gazebo Camera Plugin Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. With ignition, it is a little bit different. In this tutorial, you launched a robot simulation with. Ignition Gazebo Camera Plugin.
From discuss.ardupilot.org
How to use the SITL gazebo camera without ROS2? ArduCopter Ignition Gazebo Camera Plugin A camera sensor is included in a world. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Since this tutorial will show how to use a. Ignition Gazebo Camera Plugin.
From docs.ros.org
gazebo_plugins Gazebo ROS Dynamic Plugins Ignition Gazebo Camera Plugin A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. The plugin allows you to: This gsoc project aimed to implement the first step in the simulation of. Ignition Gazebo Camera Plugin.
From www.theconstructsim.com
How to create a ROS Sensor Plugin for Gazebo The Construct Ignition Gazebo Camera Plugin Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. With ignition, it is a little bit different. A simple example demonstrating the use of ros_ign_bridge to. Ignition Gazebo Camera Plugin.
From www.youtube.com
6 Adding simulated camera to our Simple Robot using gazebo plugins Ignition Gazebo Camera Plugin The plugin allows you to: Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. Since this tutorial will show how. Ignition Gazebo Camera Plugin.
From wiki.ros.org
hector_gazebo_thermal_camera ROS Wiki Ignition Gazebo Camera Plugin The plugin allows you to: This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Not all the plugins have been ported over. Ignition Gazebo Camera Plugin.
From github.com
ignitiongazebo · GitHub Topics · GitHub Ignition Gazebo Camera Plugin A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Not all the plugins have been ported over from gazebo, here are some of the new features that ignition has implemented. The plugin allows you to: Since this tutorial will show how to use a thermal camera sensor in ignition. Ignition Gazebo Camera Plugin.
From cloud.tencent.com
Ignition Gazebo Fortress LTS试用腾讯云开发者社区腾讯云 Ignition Gazebo Camera Plugin In this tutorial, you launched a robot simulation with ignition gazebo, launched bridges with actuators and sensors, visualized data from a sensor, and moved a diff drive robot. The plugin allows you to: With ignition, it is a little bit different. A camera sensor is included in a world. Not all the plugins have been ported over from gazebo, here. Ignition Gazebo Camera Plugin.
From staging.gazebosim.org
Gazebo Sensors Thermal Camera in Ignition Gazebo Ignition Gazebo Camera Plugin Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Not all the plugins have been ported over from gazebo, here are some of the new features that. Ignition Gazebo Camera Plugin.
From www.ncnynl.com
Turtlebot3与仿真Standalone Gazebo Plugin 创客智造 Ignition Gazebo Camera Plugin The plugin allows you to: Since this tutorial will show how to use a thermal camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Since this tutorial will show how to use a segmentation camera sensor in ignition gazebo, you'll need to have ignition gazebo installed. Not all the plugins have been ported over from gazebo, here. Ignition Gazebo Camera Plugin.
From qiita.com
turtlebot4をIgnition gazeboで動かす。 ROS2 Qiita Ignition Gazebo Camera Plugin With ignition, it is a little bit different. This gsoc project aimed to implement the first step in the simulation of an optical tactile sensor using a depth camera and a contact sensor. The plugin allows you to: A simple example demonstrating the use of ros_ign_bridge to enable the exchange of messages between ignition gazebo and ros 2. Since this. Ignition Gazebo Camera Plugin.